
今年3月份,在我居住的亚利桑那州,一名女子在穿越坦佩市米尔大道时,被一辆优步自动驾驶汽车撞死。作为一名科技记者,我很清楚我周围发生的事情,但我从未想过,当我在这里过马路时,会遇到自动驾驶汽车在这里的大街上漫游,那个女人也绝对如此。也许以下想法有助于理解汽车对一切通信(V2X,即车联网)技术。
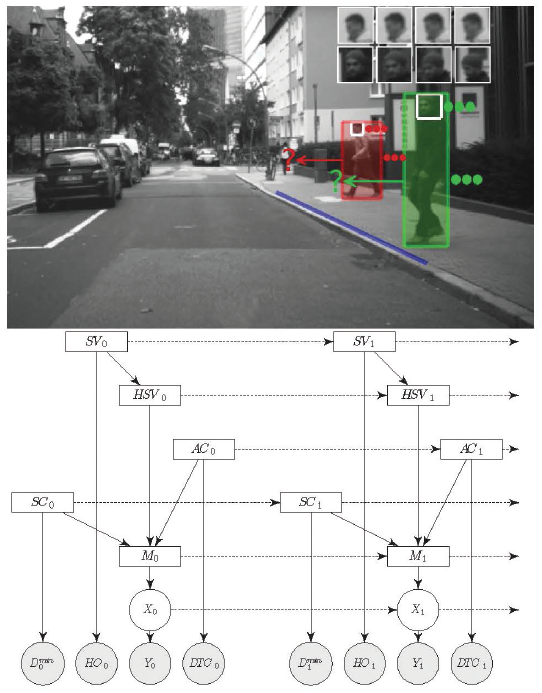
图1:使用动态贝叶斯网络对行人路径进行预测,也许能够挽救亚利桑那的一条生命。(图片来自参考文献《Looking at Humans in the Age of Self-Driving and Highly Automated Vehicles(考虑一下自动驾驶和高度自动化汽车时代下的人类)》)
使用集成了行人头部方向感知和态势感知、态势危险度和空间布局线索以及V2X技术的动态贝叶斯网络对行人路径进行预测,有可能挽救亚利桑那的一条生命(图1)。V2X可以帮助司机识别其视线以外的行人移动情况,例如在停放有许多汽车、SUV和卡车的地方。
作为一名技术专家和电子工程师,我希望看到智能技术在我们生活的各个方面取得成功,这对于改善社会生活是有意义的。但要谨慎的是,我们必须以尽可能安全的方式来利用这项技术。
根据世界卫生组织(WHO)的统计,每年约有125万人死于道路交通事故。毫无疑问,在这个充满智能手机、平板电脑以及仪表板上带有GPS导航路线图显示屏等的时代,人们在今天的道路上驾驶汽车比以往任何时候都更加分心。这些是危险而致命的。自动驾驶汽车可以消除人类驾驶员的分心驾驶,但是是人类也只有人类才能通过软件、处理和传感器等最终创建和控制未来的自动驾驶汽车。我们是工程师,我们可以安全地做到这一点。
在智能城市环境中进行测试是一种更加可控和更安全的自动驾驶汽车测试方法。接下来看看随着安全系统处理、软件和传感器技术的成熟,我们可以扩展和开发的一些可能性。
ISO 26262是关于汽车生产中电气和/或电子系统功能安全的一项国际标准。该标准的目标是提供一个汽车安全生命周期(包括管理、开发、生产、运营、服务、退役),并为在生命周期的各个阶段定制必要的活动提供支持。ISO 26262实际涵盖了整个开发过程的功能安全方面,包括规范、设计、实现、集成、验证、确认和配置的要求。它还提供确认和证明措施的要求,以便确保达到足够、可接受的安全水平。
该标准不仅涵盖硬件,还包括固件、软件和工具等。它还提供了一种基于汽车特定风险的方法来确定风险等级。在汽车安全完整性等级(ASIL)分类中,“A”是最不严格的级别,“D”是最严格的级别。美国国家仪器(NI)的一篇关于ASIL的白皮书《What is the ISO 26262 Functional Safety Standard?(什么是ISO 26262功能安全标准?)》中对此有详细介绍。
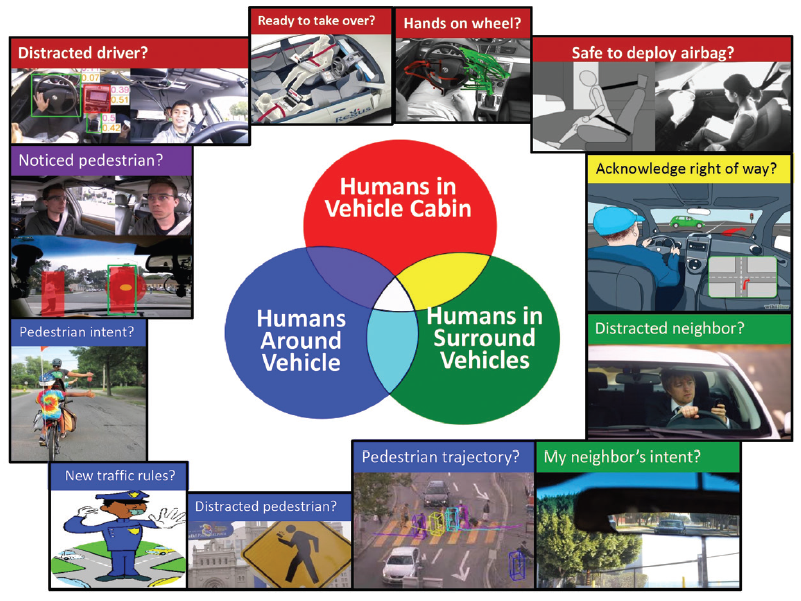
图2:需要对人类行为进行观察、理解、持续建模和预测。(图片来自与图1相同的参考文献)
倘若要了解智能汽车以及全自动汽车当中新的驾驶辅助功能,我们必须首先了解人类在汽车内部和周围的行为。设计人员必须了解汽车内外及周围汽车中的人类行为/移动并对其进行建模及最终预测(图2)。
车内
对于高度自动化或自动驾驶汽车内的人来说,驾驶员可能出现分心或疲劳情况,或者,如果有乘客,系统必须评估他们是否准备好在紧急情况下接管驾驶。车内需要安装多个不同视角的摄像头。
人和动物在车内窒息,是这个主题中的一个子集(参见《In-Car Suffocating Prevention Using Image Motion Detection(利用图像运动检测预防车内窒息)》)。车内的温度可作为一个因素,也可以部署无源红外和声音传感器。也许也可以用微波传感器来感知呼吸。
汽车周围
汽车周围需要采用智能系统、各种摄像头、激光雷达(LIDAR)、雷达,甚至人工智能(AI)以及V2X功能(稍后将详细介绍)。
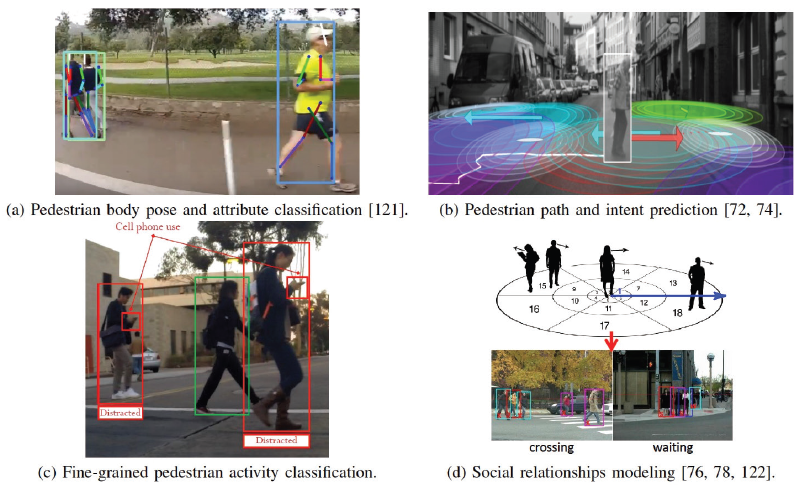
图3:汽车安全系统需要研究和感知汽车周围的人类活动,这是安全性的一个重要方面。(图片来自与图1相同的参考文献)
汽车周围的感知所使用的技术可能与车内不同。视觉传感器也需要能识别色彩、热量以及距离。
周围汽车中的人
利用合适的摄像头、传感器和软件,基于视觉的算法甚至可用来理解周围汽车中的人的行为和意图,预测其操作,并识别他们的技能、风格和注意力(图3)。Kanade-Lucas-Tomasi跟踪算法尤其适用于人脸检测与跟踪。
没有一种器件可以在任何条件下对汽车提供完全的检测和安全性,但是通过传感器融合,处理系统可以利用汽车中所有传感器的融合能力来提供最佳的安全系统。NI有一篇关于传感器融合的ADAS白皮书《Altran and NI Demonstrate ADAS HIL With Sensor Fusion(Altran和NI利用传感器融合演示ADAS硬件在环)》(图4)。
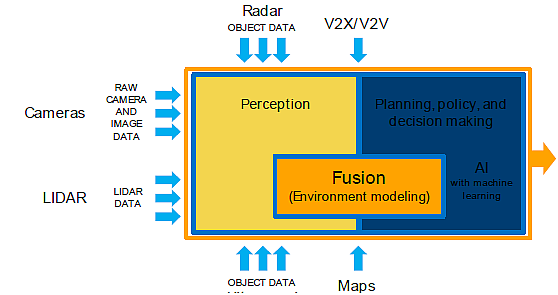
图4:推荐的典型自动驾驶平台(图片来自参考文献《An Overview of Autonomous Vehicles Safety(自动驾驶汽车安全概述)》)
摄像头
像我们的眼睛一样,摄像头是我们观察周围世界(或道路环境)的自然方式。但它确实有一些缺点。问题包括环境条件、低照度条件,以及可靠检测的计算机视觉限制等,但摄像头只是汽车感官的一部分。
专为汽车应用开发的CMOS图像传感器,与消费电子产品使用的CMOS图像传感器不同。车用CMOS图像传感器设计有:
· 更大的像素尺寸,以提高低光灵敏度;
· 分辨率较低(它不需要百万像素的性能);
· 快速响应时间,比智能手机摄像头更快;
· 传感器陶瓷封装内部有嵌入式逻辑(采用陶瓷封装材料是因为有更高的功能安全性需求)。
博世移动系统拥有一款非常出色的立体摄像头,可用于3D环绕感应(图5)。它有两个CMOS彩色成像器,分辨率为1280×960像素。凭借其强大的镜头,该器件可捕获50°的水平图像范围和28°的垂直视场角,3D测量距离范围大于50米。这种摄像头采用灵敏的动态照明技术,能够处理覆盖人眼可见波长范围的高对比度图像。

图5:博世底座系统控制立体摄像头。(图片由博世移动解决方案提供)
该系统的摄像头外壳内配有一个集成控制单元,用于图像处理和功能控制。它包括一个可扩展的处理单元,在单个芯片上提供可编程逻辑(FPGA)和双核微处理器以及集成的CAN或以太网接口。
一些应用包括自动紧急刹车、具有自动跟车功能的自适应巡航控制、交通堵塞辅助、集成式巡航辅助、车道偏离警告、车道保持和车道引导支持、施工区域辅助、窄车道辅助、避让转向支持、停车和机动辅助系统、道路标志助手,以及智能大灯控制等。欲知详情请参见此数据手册。
激光雷达
摄像头和雷达虽然必要,但不足以在汽车(尤其是自动驾驶汽车)内部和周围提供安全的环境。LIDAR可以提供非常精确的实时检测,LIDAR中的飞行时间激光对于实时和远程检测最为准确。
关于LIDAR的文章很多,但我特别喜欢《How eGaN FETs power LIDAR(eGaN FET如何驱动LIDAR)》这篇。原因是我认为GaN FET是LIDAR架构的最佳解决方案,而EPC提供的这篇文章解释了个中原因。
LIDAR存在诸如成本、小型化和高孔径角/通道数量等难题,但业界正在逐一解决这些问题。Velodyne为汽车市场提供了优质的LIDAR产品。
雷达
雷达可以在雨、灰尘或阳光等条件下保持稳定性能。我们最终需要的是用于自动驾驶的短程、中程和远程雷达模块。汽车雷达的基本架构是使用发射频率为78至81GHz的频率调制连续波(FMCW)多普勒雷达。然后将接收到的信号与发射信号进行比较,就可以获得物体或人的精确距离和速度。
与其他所有类型的系统一样,雷达也存在一些问题。它需要在上述高频下产生足够大的输出功率,并且由于在这种恶劣环境中所需的封装类型,芯片到衬底的转换需要做到低损耗和反射小,而且要采用良好的散热方案,高可靠性设计至关重要,而且所有都要成本低廉。
博世在这方面凭借其先进的技术,也提供了包括中程雷达(MRR)传感器和远程雷达(LRR4)传感器在内的良好雷达产品。
MRR
MRR能够将主天线聚焦在狭窄的主瓣上,开启角度仅为±6°(图6)。该系统能够对远距离(高达160m)的前方汽车作出反应并以更高的速度执行,同时还可最大限度地减少相邻车道中汽车的干扰。通过仰角天线,该系统在近距离处可实现±42°的开启角——因此,若有人从停放的汽车后面走到道路中间,系统从一开始就可以检测到。MRR可以通过发射天线发送频率范围为76至77GHz的调频雷达波。
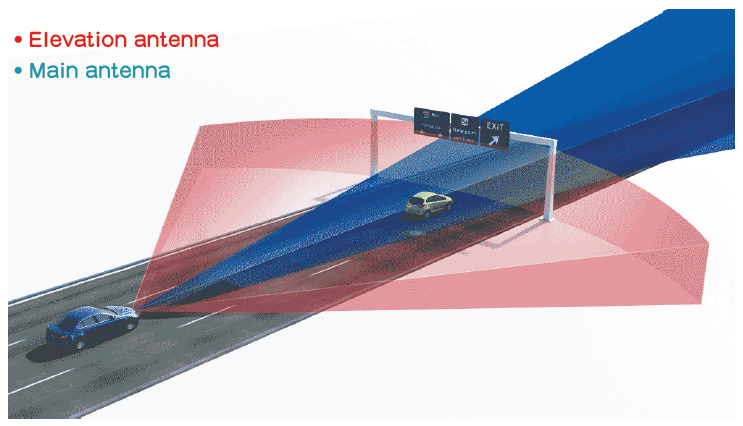
图6:博世的MRR是一种双静态多模雷达,具有四个独立的接收通道和数字波束成形(DBF)。这些技术使MRR可针对不同方向配置独立的天线,从而可提高角度测量精度,这意味着雷达的视场角可以根据情况调整。(图片由博世移动解决方案提供)
LRR4
博世的LRR4是针对雷达驾驶辅助系统的远程雷达环绕传感器的第4代解决方案(图7)。这是一种单静态多模雷达,具有六个固定雷达天线。中央四个天线具有最佳性能,可以更高速度记录汽车周围环境。它们创建了一个聚焦的波束方向图,开启角度为±6°,可以提供出色的远程检测,同时受相邻车道的交通干扰最小。
在近距离范围内,LRR4的两个外部天线将视场角扩展到±20°,最远可达5m,从而可以快速检测进入或离开车道的汽车。
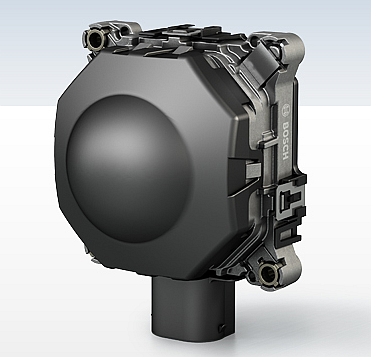
图7:博世LRR4远程雷达传感器。(图片由博世移动解决方案提供)
该雷达器件可应用于自适应巡航控制、预测性紧急制动和左转辅助等方面。
为了使驾驶员、乘客和行人都可以享有汽车的安全性,系统需要在复杂、不可预测的现实条件下使用传感器数据处理来传达意图。全球导航卫星系统(GNSS)的使用可通过额外使用精确定位服务来实现精确定位,从而使这类系统成功所需的距离精确到1m之内。
车联网(V2X)技术已经出现了好几年,可用于测试各种平台解决方案,但最近Qualcomm推出了一款C-V2X 9150芯片组,可以在C-V2X系统中通过即将推出的5G网络实现车联网直接连接(图8)。GNSS已经可以提供小于1m的精度、航向和准确速度等精确定位服务,并且是时间同步的一个主要来源,这对整个系统的精度至关重要。
这些类型的位置增强系统需要在车道级精度需求的量级上达到更精确的亚米级精度。准确的定位需要无处不在:密集的城市区域、停车场,以及多层立交桥。对于V2X,更新频率还需要能够每100ms至少传输一次汽车位置。

图8:5G将实现汽车安全性的巨大飞跃——这种环境是自动驾驶汽车真正可以发挥作用的地方。(图片由Qualcomm提供)
随着5G的出现,Qualcomm最近与福特和奥迪以及5G汽车协会(5GAA)一起测试了一个蜂窝车联网(C-V2X)平台。5GAA旨在联合电信行业和汽车制造商,为未来的移动和运输服务开发端到端解决方案。

图9:C-V2X可通过全球5.9GHz ITS频谱上的实时直接通信,实现类似图中所示的通知,而实现汽车对汽车(V2V)的碰撞避免和增强的道路安全性。(图片由The Connected Car提供)
C-V2X具有两种互补的传输模式:
1. 通过V2N和“Uu”接口的网络通信——这可以检测到前方的事故并提供该事件的位置距离。
2. 直接通信:“PC5”接口上的V2V、汽车对基础设施(V2I)和汽车对行人(V2P)通信工作在ITS频段(例如ITS 5.9GHz),并且独立于蜂窝网络(图9、图10)。
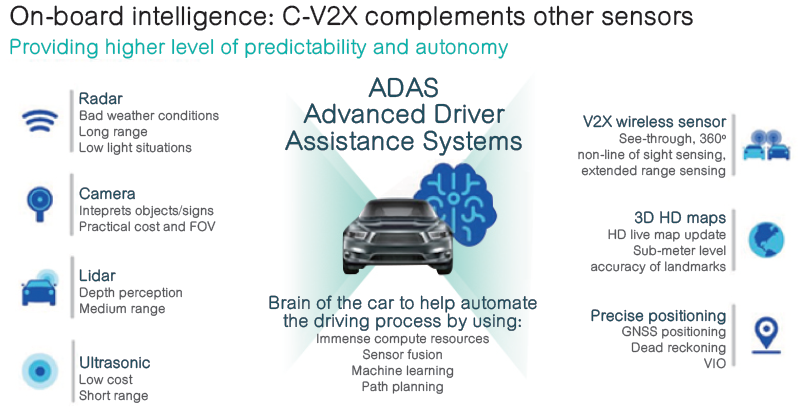
图10:C-V2X将与汽车传感器互补,为自动驾驶提供高可预测性的车载智能。(图片由Qualcomm提供)
除智能城市外,我们不应该在世界上任何人口稠密的城市测试自动驾驶汽车。华为就是这样做的。该公司最近完成了与沃达丰德国和博世的自适应巡航控制驾驶辅助系统合作的C-V2X试验。这是一个很好的试验,是在德国的A9高速公路上进行的——它之所以好,是因为它不是一个自动驾驶汽车试验,而是对驾驶员/汽车C-V2X实时警报系统的测试。当我们将此测试用于自动驾驶汽车级别时,需要在具有V2X或C-V2X的智能城市环境中进行测试。为什么?请继续往下阅读。
松下在美国科罗拉多州丹佛市的第一个CityNOW项目就是一个智能城市。它是一个位于丹佛机场附近的400英亩社区,可以安全地配备V2X甚至C-V2X,其规模相对较小,人口较少。自动汽车测试通知很容易传送给该市居民并使其收到。这在凤凰城这样的大城市是不可能的。
这种小型的智能城市综合体实际上正在为无人驾驶汽车做准备,无人驾驶的穿梭巴士可以将居民从轻轨运送到整个城市的公交线路。最终,美国交通部(DOT)将发放拨款,将这些技术部署在与无人驾驶兼容的高速公路口。现在这是一个可行而安全的想法!我仅希望他们做的另一件事是在试验之前开始部署V2X或C-V2X,这必须为自动驾驶穿梭巴士部署好。根据科技博客Business Insider上的一篇文章《Panasonic is building a 'smart city' in Colorado with high-tech highways, autonomous vehicles, and free WiFi(松下正在科罗拉多州建设一个拥有高科技高速公路、自动驾驶汽车和免费WiFi的“智能城市”)》,这一智能CityNOW项目部署有部分由太阳能供电的微电网、安全摄像头、免费Wi-Fi、可调光LED路灯以及污染传感器。更多智能城市基础设施正在酝酿之中。
在任何一个城市实施V2X起初都是昂贵的,但一个人的生命值多少钱?成本将会降低,自动驾驶汽车测试应该暂停,直到可以在一个受控环境中安全地进行才能继续。行业参与者都争先恐后地想成为这项技术在市场上首个得到验证的玩家——这一切都是为了获得更多的利益。作为工程师和设计师,我们都希望快速开发和测试我们的想法,但首先我们要保证安全和负责任。
(《电子技术设计》2018年9月刊版权所有,禁止转载。原标题:《自动驾驶汽车:使之安全上路的电子技术》)
 最前沿的电子设计资讯
最前沿的电子设计资讯

