
时钟周期也叫振荡周期或晶振周期,即晶振的单位时间发出的脉冲数,一般有外部的振晶产生,比如12MHZ=12×10的6次方,即每秒发出12000000个脉冲信号,那么发出一个脉冲的时间就是时钟周期,也就是1/12微秒。通常也叫做系统时钟周期。是计算机中最基本的、最小的时间单位。
在8051单片机中把一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示)。
在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段,每一阶段完成一项工作。例如,取指令、存储器读、存储器写等,这每一项工作称为一个基本操作。完成一个基本操作所需要的时间称为机器周期。一般情况下,一个机器周期由若干个S周期(状态周期)组成。8051系列单片机的一个机器周期同6个S周期(状态周期)组成。前面已说过一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示),8051单片机的机器周期由6个状态周期组成,也就是说一个机器周期=6个状态周期=12个时钟周期。
在标准的51单片机中,一般情况下,一个机器周期等于12个时钟周期,也就是机器周期=12*时钟周期,(上面讲到的原因)如果是12MHZ,那么机器周期=1微秒。单片机工作时,是一条一条地从RoM中取指令,然后一步一步地执行。单片机访问一次存储器的时间,称之为一个机器周期,这是一个时间基准。
机器周期不仅对于指令执行有着重要的意义,而且机器周期也是单片机定时器和计数器的时间基准。例如一个单片机选择了12MHZ晶振,那么当定时器的数值加1时,实际经过的时间就是1us,这就是单片机的定时原理。
但是在8051F310中,CIP-51 微控制器内核采用流水线结构,与标准的 8051 结构相比指令执行速度有很大的提高。在一个标准的 8051 中,除 MUL和 DIV以外所有指令都需要 12 或 24 个系统时钟周期,最大系统时钟频率为 12-24MHz。而对于 CIP-51 内核,70%的指令的执行时间为 1或2个系统时钟周期,只有 4 条指令的执行时间大于 4 个系统时钟周期。 所以在计算定时器的值时要注意这里的变化。
指令周期是执行一条指令所需要的时间,一般由若干个机器周期组成。指令不同,所需的机器周期数也不同。对于一些简单的的单字节指令,在取指令周期中,指令取出到指令寄存器后,立即译码执行,不再需要其它的机器周期。对于一些比较复杂的指令,例如转移指令、乘法指令,则需要两个或者两个以上的机器周期。
系统时钟:系统时钟就是CPU指令运行的频率,这个才是CPU真正的频率。
单片机内部所有工作,都是基于由晶振产生的同一个触发信号源,由这个信号来同步协调工作步骤,我们把这个信号称为系统时钟,系统时钟一般由晶振产生,但在单片机内部系统时钟不一定等于晶振频率,有可能小于晶振频率,也有可能大于晶振频率,具体是多少由单片机内部结构决定,正常情况和晶振频率会存在一个整数倍关系。系统时种是整个单片机工作节奏的基准,它每振荡一次,单片机就被触发执行一次操作。
一般来说,单片机只有一个时钟源.用了外部晶振,就不用内部RC,用了内部RC,就不用外部晶振.振荡器振荡,产生周期波.单片机在这样的周期波的作用一下有规律的一拍一拍的工作,波的频率越高,单片工作得就越快,波的频率越低,单片机工作得就越慢。
有了以上的概念以后,就可以正确的理解定时器的工作原理了,在8051F310单片机中,有3个定时器,如果定时器1工作在模式1下,如工作模式1下,是16位的计时器,最大数值是65535,当再加1时(=65536),就会发生溢出,产生中断,所以如果我们要它计1000个数, 那么定时初值就是65536-1000,结果就是64536,这个值送给TH、TL,因为是16进制的,所以高位是64536/256取商,低位是64536%6取余。
再者,就是每一计数的时间是多久?一般我们取12M晶振时,一个周期刚好是1us,计数1000个就是1ms,这是因为标准的51单片机是12时钟周期的(STC有6时钟和1时钟方式)。那么,如果我们晶振是12M,就比较好算,如果是其它的,就用12去除好了。比如是6M的,那么就是12/6=2,每个计数是2us,那么你要定时1ms就只要计数500个即可以。
定时器的初值跟定时器的工作方式,跟晶振频率都有关系。一个机器周期Tcy=晶振频率X12,计数次数N=定时时间t/机器周期Tcy,那么初值就X=65536-N,得出的数化成十六进制就行了。这里是用定时器O工作方式1做例子,如果是其它工作方式,就不能是65535了。工作方式0是8192,方式2,3是256。这里有一个公式:
TH=(65536-time/(12/ft))/256
其中,time就是要延时的100ms(要取100000us),ft是晶振频率。这个式子又可以简化成
TH=(65536-time*ft/12)/256
TL=(65536-time*ft/12)%6
在一本书上还看到了这样计算定时初值的:
TH0=-(50235/256); //重装100ms定时初值
TL0=-(50235%6); ///这里使用的6M晶体,
这里是6M晶体,延时100ms,那么按上面讲的原理,6M是每个计数为2us,100ms定时就是计数50000个。
那么,定时器初值要 65536-50000=15536,转成16进是3CB0。这就是要送给TH(=3C) 和TL(=B0)的值。
程序中写 TH0=-(50235/256);其实它是这样的TH0=0x100-(50235/256); 在51中,取负数,其结果就是它的值取反+1,也可以用0x100(十进制的256)去减,结果是多少呢?结果就是3C。
STM32的TIM一般有高级定时器TIM1,(TIM8只有在互联性产品有),普通定时器TIM2,TIM3,TIM4,(TIM5,TIM6,TIM7有点设备中没有);今天就只介绍普通定时器,因为高级定时器我还不会!每一个普通定时器都有4路通道!

我们先看看这个逻辑图吧!我们今天先讨论讨论定时器的问题!我用红色笔标过的路线就是定时器的工作路线,时钟有内部时钟产生,到PSC哪里进行分频处理,然后CNT进行计数,上面还有一个自动重装载寄存器APP。

这个是分频器的工作原理,我们可以看,分频器设定之前分频系数为1[1],后面的[2][3][4]分频系数为2,分频系数改变后,计数周期也跟着改变了;同时预分频设置生效时,他还会产生一个中断信号,这个中断信号不要管他,一个系统时钟周期后会自动消失,跟I2C的差不多!

这个是计数过程,上面说过了,计数跟分频后的周期有关;当计数达到装载的数值之后,系统会产生一个三个信号,其中溢出信号和更新事件一个时钟周期后会自动消失,而这时候触发了更新中断标志位UIF,我们可以用这个UPDATE来做定时器的中断标志信号!
TIM_ITConfig(TIM2, TIM_IT_UPDATE, ENABLE);

大容量的STM32F103XX增强型系列产品包含最多2个高级控制定时器、4个普通定时器和2个基本定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。
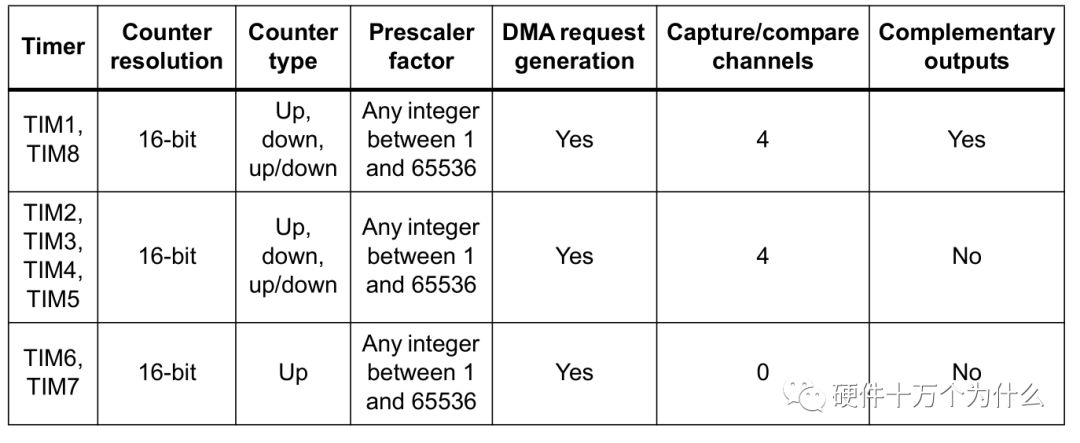
下表比较了高级控制定时器、普通定时器和基本定时器的功能:
定时器功能比较
1)计数器三种计数模式
向上计数模式:从0开始,计到arr预设值,产生溢出事件,返回重新计时
向下计数模式:从arr预设值开始,计到0,产生溢出事件,返回重新计时
中央对齐模式:从0开始向上计数,计到arr产生溢出事件,然后向下计数,计数到1以后,又产生溢出,然后再从0开始向上计数。(此种技术方法也可叫向上/向下计数)
2)高级控制定时器(TIM1和TIM8)
两个高级控制定时器(TIM1和TIM8)可以被看成是分配到6个通的三三相PWM发生器,它具有带死区插入的互补PWM输出,还可以被当成完整的通用定时器。四个独立的通道可以用于:
(1)输入捕获
(2)输出比较
(3)产生PWM(边缘或中心对齐模式)
(4)单脉冲输出
配置为16位标准定时器时,它与TIMX定时器具有相同的功能。配置为16位PWM发生器时,它具有全调制能力(0~100%)。在调试模式下,计数器可以被冻结,同时PWM输出被禁止,从而切断由这些输出所控制的开关。很多功能都与标准的TIM定时器相同,内部结构也相同,因此高级控制定时器可以通过定时器链接功能与TIM定时器协同操作,提供步或事件链接功能。
3)通用定时器(TlMx)
STM32F103XC、STM32F103XD和STM32F103XE增强型系列产品中,内置了多达4 个可同步运行的标准定时器(TIM2、TIM3、TIM4和TIM5)。每个定时器都有一个16位的自动加载递加/递减计数器、一个16位的预分频器和4个独立的通道,每个通道都可用于输入捕获、输出比较、PWM和单脉冲模式输出,在最大的封装配置中可提供最多16个输入捕获、输出比较或PWM通道。它们还能通过定时器链接功能与高级控制定时器共同工作,提供同步或事件链接功能。在调试模式下,计数器可以被冻结。任一标准定时器都能用于产生:PWM输出。每个定时器都有独立的DMA请求机制。
这些定时器还能够处理增量编码器的信号,也能处理1至3个霍尔传感器的数字输出。
4)基本定时器-TlM6和TIM7
这2个定时器主要是用于产生:DAC触发信号,也可当成通用的16位时基计数器。独立看门 狗独立的看门狗是基于一个12位的递减计数器和一个8位的预分频器,它由一个内部独立的40kHz的RC振荡器提供时钟; 因为这个RC振荡器独立于主时钟,所以它可运行于停机和待机模式。它可以被当成看门狗用于在发生问题时复位整个系统,或作为一个自由定时器为应用程序提供超时管理。通过选项字节可以配置成是软件或硬件启动看门狗。在调试模式下,计数器可以被冻结。
5)窗口看门狗
窗口看门狗内有一个7位的递减计数器,并可以设置成自由运行。它可以被当成看门狗用于在发生问题时复位整个系统。它由主时钟驱动,具有早期预警中断功能; 在调试模式下,计数器可以被冻结。
6)系统时基定时器
这个定时器是专用于实时操作系统,也可当成一个标准的递减计数器。它具有下述特性:
(1)24位的递减计数器
(2)自动重加载功能
(3)当计数器为0时能产生一个可屏蔽系统中断
(4)可编程时钟源
7)通用定时器的时钟来源;
a:内部时钟(CK_INT)
b:外部时钟模式1:外部输入脚(TIx)
c:外部时钟模式2:外部触发输入(ETR)
d:内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器
8)通用定时期内部时钟的产生:
从截图可以看到通用定时器(TIM2-7)的时钟不是直接来自APB1,而是通过APB1的预分频器以后才到达定时器模块。
当APB1的预分频器系数为1时,这个倍频器就不起作用了,定时器的时钟频率等于APB1的频率;
当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1时钟频率的两倍。

这里要分析一下几个概念,也是理解定时器的功能的核心概念,通用定时器有些类似于操作系统的定时器节拍,可以在定时器采用的时钟源的基础上再进行分频,然后再设定溢出大小,进而实现定时的功能,当然自动重载功能更不再话下。
预分频的功能是使定时器在APB时钟的基础上再一次分频,使其独立的运行。就像上述代码中举例,预分频系数设定为36000-1,则表示该定时器的 时钟频率就变成了72MHz/36000 = 2KHz,而“计数溢出大小”可以理解为自动装载数值,表示每隔x个计数溢出一次,可以产生1次中断,当然这个频率是经过预分频后的频率。
所以从上述的分析可知,定时器的定时时间计算为:
Tout = (TIM_Period+1)*(TIM_Prescaler+1)/72000000
在本程序案例中:Tout= 2000*36000/72000000=1s
需要注意的是,公式中的72000000的使用,是因为该定时器采用的时钟源为72MHz,如果配置成别的时钟源,则相应公式也应该改变。
另外TIM_ClockDivision为时钟分割,这个简单的讲,就是定时器的数字滤波功能,设置成默认即可。
(来源:硬件十万个为什么)
 最前沿的电子设计资讯
最前沿的电子设计资讯
