
在本系列文章的第一部分中,运算放大器从有限增益单极放大器近似为无限增益单极运算放大器,推导出跨阻放大器电路的增益,如图1所示。在本文的第二部分,我们将研究其后果。
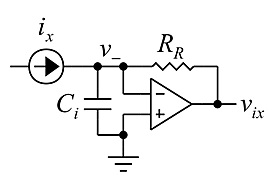
图1:一个看似简单的电路只有两个器件:运算放大器和反馈电阻。
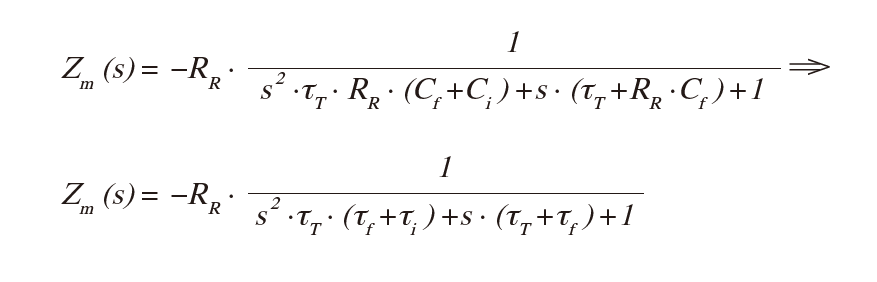
从第一部分得知,推导增益即跨阻抗为:
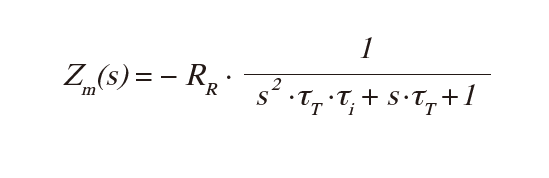
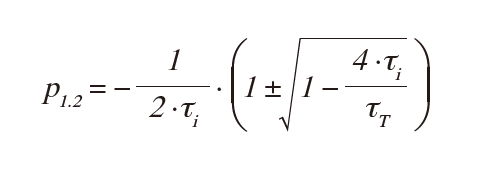
极点是:
放大器增益使我们有机会将控制理论应用于电路。这个例子将说明控制理论在理解电路动态特性时的重要性和实用性。逐步实施,而不是一股脑全堆进来,希望这样能够对控制技术及其应用方式有深入了解。
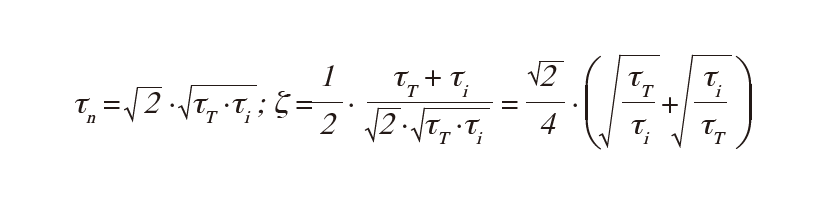
极点对(二次)多项式通常表示为:
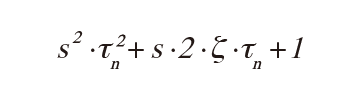
放大器的谐振时间常数τn = 1/ωn = 1/(2 x π x fn)和阻尼ζ分别为:
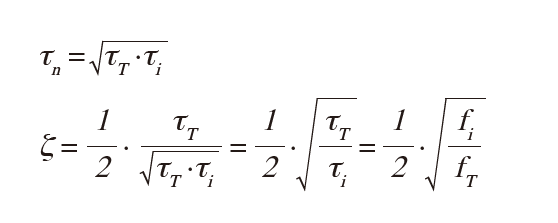
当ζ<1时,极点变为复数极点对,极角为:

对于实极点,ζ > 1且φ = 0。
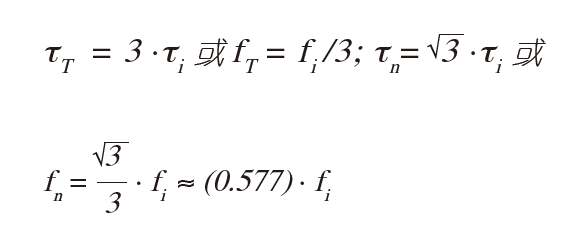
对于恒定组(或包络)时延(最大平坦包络延迟/MFED或贝塞尔)响应,相位随频率线性减小,并且发生在φ = 30o的极角处。所有频率的时延都是相同的,保持波形不变。然后:
对于跨阻放大器MFED响应:
对于临界阻尼(没有过冲的最快阶跃响应),ζ = 1且τT = 4 x τi或fT = fi/4。两个极点都是fi/2。
随着RR变大、fi减小,放大器在vix中显示出更大的过冲。在某种程度上,这对于Z-meter是有利的,因为极角φ = 45°,阻尼ζ = cos(φ) = cos(45o) ≈ 0.707,并且频率(或幅度)响应是恒定或平坦的,接近带宽频率。这就是最大平坦幅度(MFA)频率响应。对于稳态(频域)应用,MFA响应是最佳的。对于具有理想阶跃响应的瞬态(时域)应用,MFED响应是最佳的。(在示波器垂直放大器的设计中,优化两种响应的标准是冲突的。)
慢运放具有低fT且τT >> τi,导致两个实极点离得比较远。在极限值:
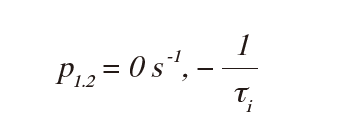
这是原点和fi处的极点。fT必须足够小以保持fT << fi。然而,随着fT减小,环路增益减少,可能不足以维持容许的运算放大器增益误差。在这种情况下,精度需要一定的速度。
随着运放fT的增加,Zm的阻尼减小,稳定性降低。对于给定的ς和fi:
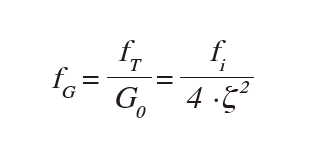
若fT = 1MHz且G0 = 105,则fG = 10Hz,并且临界阻尼回路(ζ = 1)的fi = 40Hz。假设Ci = 10pF,那么RR = 398MΩ,这样对于任何较小的值都可以保持fi > 40Hz。
图2显示了闭环极点随着fT(更快的运放)的增加而移动的情况。在原点和fi(–1/τi)处的分离极点在fi/2(此时π = 1)处聚集在一起,然后变为复数极点对。随着fT增加,极角增加并且ζ减小。放大器变得不稳定,响应更加振荡。
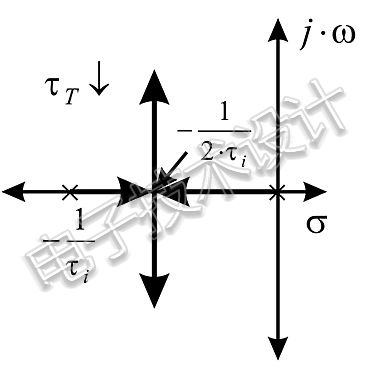
图2:闭环极点随着fT的增加而移动。
只要变化的参数(图2中的fT或τT)同时出现在多项式的s2和s项中,图中就会显示极点移动的位置或轨迹。放大器在无限fT时阻尼最小,当τT → 0s时极点位置在极限值:

在jxω轴上有两个值,其响应是稳定的(而不是振荡的):原点和±jx ∞处。两者都是无限的,(Zero(0)是无穷小的)。当τT → 0s时,极点多项式的s中的两个项接近零,留下恒定的1项,并且不受频率影响。在极限情况下,极点位于jxω轴上,ζ= 0(振荡器的条件),但在s的有限值处,它们的幅度为零。极点频率很高,阻尼不再重要。它们与fi相距太远而不会影响环路动态。这是理想运算放大器的条件。因此,我们可以得出结论,对于非常慢或非常快的运算放大器,极点是充分分离的,以使响应稳定。只有在fT的范围内,这时运算放大器和Ci极点太靠近,阻尼在足够低的极点频率fn处过度降低,同时放大器中发生幅度相当大的振荡。
再回到跨阻放大器,如果运算放大器几乎是理想的,也就是说,速度快到τT ≈ 0s,则极点多项式大约为1。对于足够快的运算放大器,fT >> fi,而且极点分开,就会有稳定的环路。为了提供额外的阻尼,使运算放大器fT(和环路增益)不会过低,电容器Cf需要通过RR分流。然后用包含Cf的电路代数计算:
极点对参数为:

Cf的作用是在二次系数中将τf加到τi,更重要的是加到线性项中的τT,这会增加阻尼。因为τi = τT,所以:
对于临界阻尼,设π = 1;那么τT = (3 + 2 x √2) x τi ≈ 3.414 x τi且τn ≈ 1.848 x τi。如果没有Cf(Cf = 0pF),如先前所计算的,τT = 4 x τi。若有Cf,在相同的动态响应下,运算放大器可以更快,即具有更高的G0并实现更高的精度。
频率响应幅度和相位是:
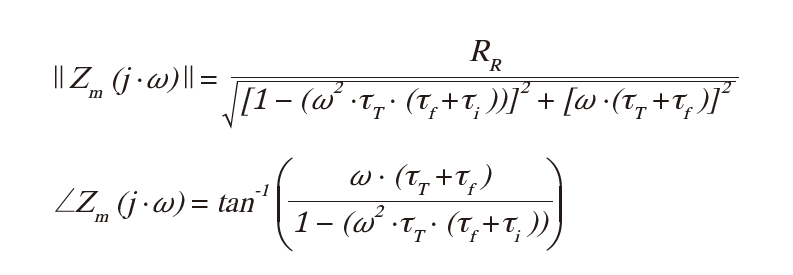
对于理想的快速运算放大器(τT = 0s)并且当Cf = Ci(τf = τi)时,在频率fg(或ωg)处具有响应:
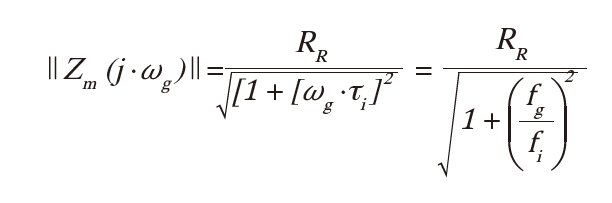
如果fi = 10 x fg,那么幅度误差≈0.5%。因为fi = 10 x fg,相位误差 ≈ 6o。相位误差对频率效应比对幅度误差更敏感。这在阻抗计电路设计中很重要,有时在光电探测放大器中也很重要,因为光电探测波形要与一些其它波形同步。
对于一些带跨阻放大器的Z-meter(ZM)设计,RR要足够大,即10MΩ或更大。当RR变得非常大时,要得到期望的阻尼,分流Cf必须很小,并且电阻分流寄生电容还可能过大。为了避免这个问题,可以使用以下电路代替。
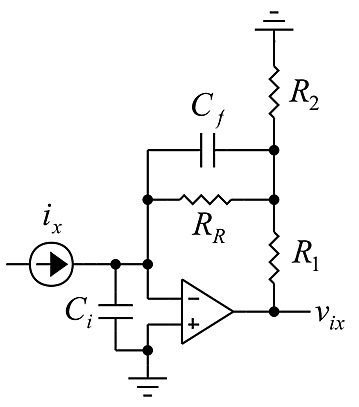
图3:使用该电路避免电阻分流寄生电容过大。
要让运算放大器成为高增益单极运算放大器,G ≈ –1/s x τT(参见本系列文章第一部分有关G的推导)。反馈分频器传递函数是:
且τf = RR x Cf。当电路用Rp = R1||R2求解时:

理想运算放大器(τT = 0s)的Zm降低到:
对于Rp = 0Ω,跨阻进一步降低至:
如果在输出与RR和Cf之间插入快速×1缓冲放大器,则R1和R2分压器输出电阻不需要太小(Rp << RR)。那么当Rp = 0Ω且运算放大器具有τT时:

该电路与没有输出分频器的情况有两个不同:RR和τT都有效地增加了1/Hdiv。
通过本文两部分的阐述可以看出,即使是只有两个器件的简单电路也可能涉及复杂的动态推导。设计人员有时会避免使用这些推导来减少数学计算的麻烦,但是使用这些公式可以更好地了解给定电路在各种条件下的性能表现。我们介绍的跨阻放大器分析可为这样的电路设计提供一个模板,并提供如何分析放大器动态特性的指导性示例。
不要因为立方或更高次多项式而拒绝使用s域代数来解决电路动态问题。我们在本实例中遇到了一个立方项,但没必要去解它,因为通过简化可将多项式降为二次方程,方便以后的分析计算。这种情况很常见,因为电路在设计阶段常常被模块化,它们要么彼此隔离,要么通过受控端口阻抗进行受控交互。设计中可以应用模板方案,但通常限于s域中的二次方程。
(原文刊登于ASPENCORE旗下Planet Analog网站,参考链接:Seemingly Simple Circuits: Transresistance Amplifier, Part 2--Transimpedance Amplifier Dynamics。)
《电子技术设计》2018年11月刊版权所有,禁止转载。
 最前沿的电子设计资讯
最前沿的电子设计资讯

