
逆向反馈和控制回路的引入堪称工程史上的一个辉煌进步,但随之而来(可能就在同一天!)的负面影响也凸显无遗,这引起了极大的混淆、挫折和失败,暴露出来的问题包括时间滞后、无阻尼过冲、不稳定和振荡等。多年来,各种反馈技术和控制策略不断涌现,以驯服这个驻留在伺服回路中破坏稳定性的鬼魔。其中最为强大和最受欢迎的当数比例积分微分(PID)控制器。
尽管PID获得了广泛而成功的应用,但它也有自己的局限性。PID控制器的一个特殊问题是与单比特(即“高/低”或“Bang-Bang”)反馈传感器的配合。这样的传感器给PID造成了麻烦,因为它们的输出既不包含PID的比例(P)、也不包括微分(D)信息,只留下用于提取控制信号的积分(I)。遗憾的是,纯积分在受控变量中存在严重的稳定性问题。
有一种“直接积分”算法对受控变量进行采样并从设定值中减去该值,将所得差值乘以增益因子,然后对结果进行积分以产生反馈(输出)信号。由此产生的伺服回路具有很好的性能,包括简单性和零稳态误差。但是,它还表现出不期望的持续振荡趋势,这种振荡最终不会回到设定点。这种持续的振荡几乎是不可避免的,因为当受控变量从偏离中纠正并努力回到设定点时,反馈已经严重地过度校正。由此产生的过冲可能会增加到与原始扰动一样大,导致与初始过冲一样大的反向下冲,并持续下去。
图1所示为一个相对湿度控制的应用示例,红色曲线代表相对湿度,是在环境室中使用简单的“Bang-Bang”传感器和直接积分算法来实现的,这显然不太令人满意。
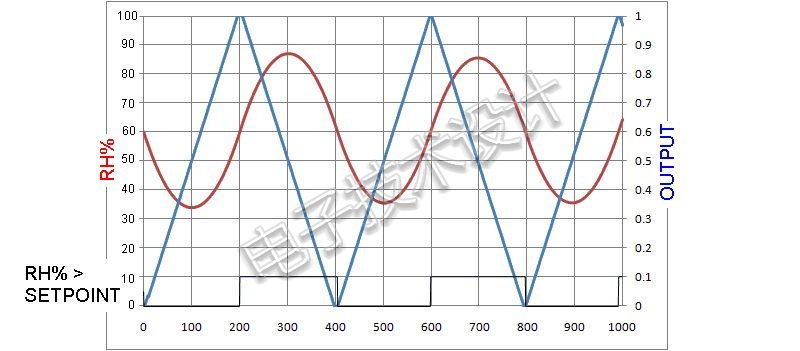
图1:“Bang-Bang”传感器和纯积分反馈引起系统不稳定。
因此,十几年前,我尝试设计了一种比PID更简单、更容易调整的替代方案,它只有一个增益因子需要调整,而不是像PID那样需要调整三个。我将其称为“半收回”(TBH)控制器,并在2005年的一篇EDN设计实例文章中对其进行了描述。
根据直觉,你可能想使用直接积分与“Bang-Bang”传感器来解决问题,当系统超过设定点时,它会对所需反馈进行更好的估计,比采用简单积分的方法要好。TBH控制器就是基于这样的想法,通过利用直接积分的无阻尼过冲和下冲近似相等来实现这一点。为此,引入了变量HO,它是先前转换中反馈项H的值。然后运行修改后的伺服回路,系统超过设定值的时刻除外。每当超过设定点时,将反馈项(H)替换为其当前值与前一个值(HO)的平均值。这一举措将收回累积在超过点之间的一半调整,因此才有了这个绰号:TBH。
尽管TBH的动态性能(例如,稳定速度)与专业调谐的PID回路还不能相提并论,同时还必须应对各种困难的不理想过程,但它很容易实现基本的稳定性和固有的零稳态误差且比较稳健。
令人高兴的是,纯积分的稳定控制是TBH的专长。修改TBH的纯积分结果如图2所示,可以明显看出有更好的性能。
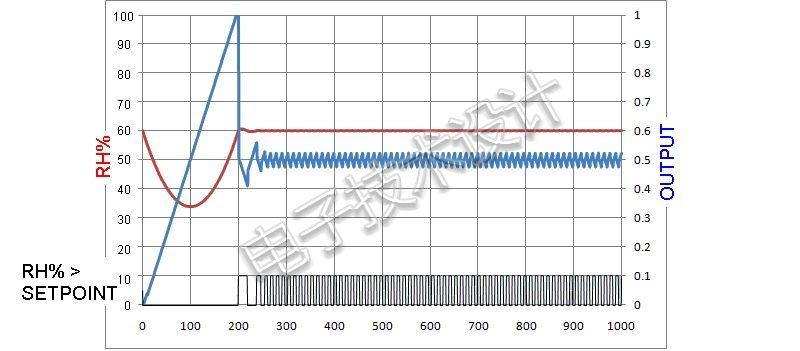
图2:通过TBH积分改善收敛和稳定性。
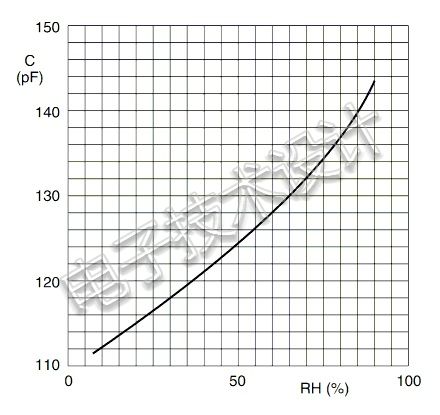
要提供这一方法的工作示例,需详细了解TBH湿度控制解决方案。我们必须从描述“Bang-Bang”湿度传感器开始:Vishay 691,当环境相对湿度(RH%)从10%变化到90%时,其电容从~112pF变化到~144pF(即~0.36pF/%RH)。参数曲线见图3。
使用该传感器的完整控制系统如图4所示。电路拓扑结构利用RS触发器IC3A作为电容比比较器,将Vishay探测器CX与参考电容CREF相关联,VR2设置设定点比率,从而得到设定点RH%。比较器仅指示传感器的读数是高于还是低于设定值。
IC2B(引脚7)产生一个工作在22Hz左右的简单时钟。控制器的比较周期从时钟的正向转换开始,它将IC3A上的R和S输入驱动为高电平。这种情况将RS触发器置于一个逻辑上异常的奇怪的状态,同时将Q和-Q输出设置为高电平。当时钟信号随后返回低电平时,IC3A的S和R输入紧跟其后,速率取决于各自的RC时间常数。
IC3A从逻辑异常状态退出,并且最终进入稳定的0/1状态,这取决于哪个输入(R或S)是由更长的RC时间常数驱动的。因为S引脚上的时间常数取决于CX,因而也由RH%决定。如果RH%<设定值,则Q = 0,如果RH%>设定值,则Q = 1。IC3B在下一个时钟周期开始时捕获IC3A自身的排序结果并进入稳定的二进制状态,如图5的时序图所示。
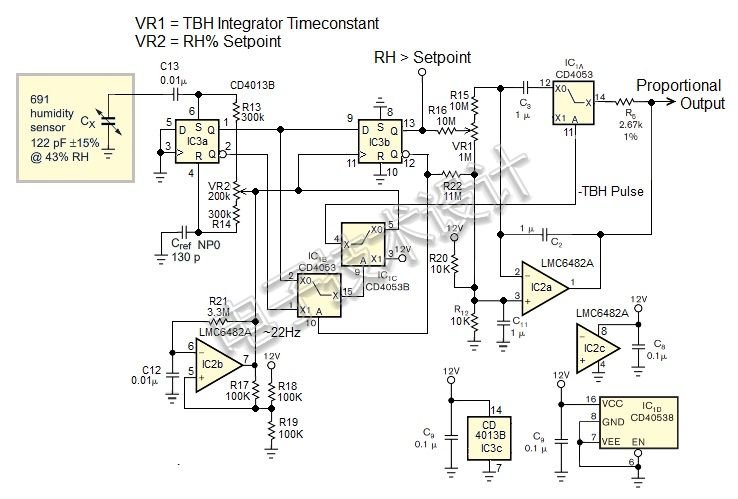
图4:TBH湿度控制器。
控制器的比例输出信号来自积分器IC2A,它从IC3B接收由VR1缩放后的信号——这是TBH(唯一的)反馈增益因子。同时,IC1的开关将IC3A和IC3B的输出与时钟(IC2B)相结合,每当检测到的RH信号在任一方向上超过设定值时,就产生低电平脉冲。当收回一半的情况发生时,TBH设定点超过脉冲对反馈收敛和稳定性至关重要。得到的输出信号如图5所示。
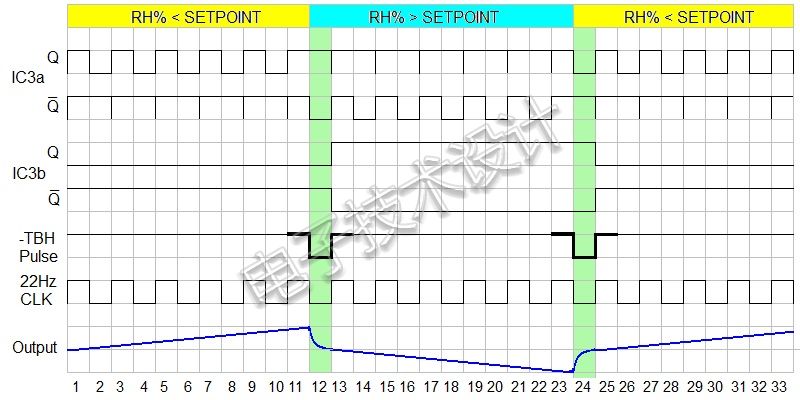
图5:RH传感器和TBH算法时序图。
(原文刊登于ASPENCORE旗下EDN英文网站,参考链接:Generate proportional feedback from a bang-bang sensor with a "take back half" controller。)
《电子技术设计》2018年11月刊版权所有,禁止转载。
 最前沿的电子设计资讯
最前沿的电子设计资讯

