
在本文的第一部分《数据采集和仪器:DAS和传感器》中,我们研究了数据采集系统(DAS)中涉及的电子技术和传感器。在第二部分中,我们将了解获取原始ADC数据后该如何处理。
图1所示为通道数据处理块图。每个方块代表一个具有输入和输出量的函数(或“曲线”)。待测量的通道输入量X由传感器转换成传感器电量S,比如电阻或电压。传感器电路(比如电桥)对传感器做出响应并产生电压V。可编程增益放大器按增益G放大V,输入到A/D转换器,得到VxG。然后A/D转换器(ADC)将此电压转换为数字计数W。
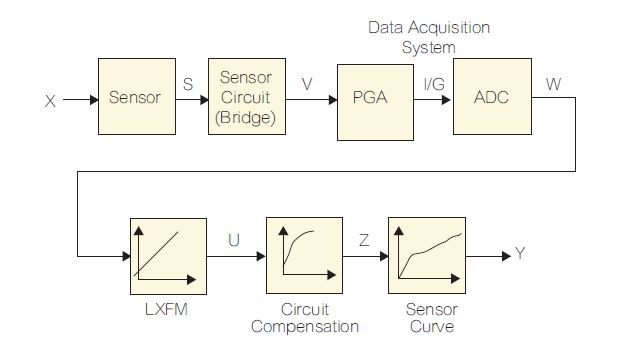
图1:通道数据处理块图。
PGA和ADC一起带来偏移和增益(斜率)误差。如果PGA和ADC是线性的,则可以通过下一个方块U(W)(或LXFM)在软件中进行误差纠正。它使用通道校准参数将原始数据计数W转换为U=V,使U表示与V相同的值。换句话说,U(W)反转、“撤消”或线性“补偿”PGA和ADC组合造成的线性误差。通过数学公式可将其设置为:

用数学函数表示F(G),F是G的函数,即F是输出,取决于输入G。U(W)是线性变换,不能补偿非线性传感器或传感器电路,它只能反转线性函数。在传感器和电路都是非线性的情况下,U(W)仅能校正线性误差,U(W)设定为等于V。
对于非线性传感器或电路,第一个非线性补偿方块Z(U)可补偿传感器电路的非线性,并设置为V–1(S)=S(V)。最后一个方块用来补偿传感器的非线性,它基于制造商的传感器曲线Y(Z),对应于实际传感器的X(S)=S–1(X)。
总的来说,每个软件处理块执行模拟DAS块的反转,以便在给定W的情况下,通过撤消每个DAS块对X进行的操作来恢复X。
例如,考虑电桥电路中的单个RTD温度传感器。X是温度,单位为oC。RTD电阻随温度变化而改变,产生R(X)。桥电路电压随R(X)非线性变化,根据分压器公式产生输出电压V(R):
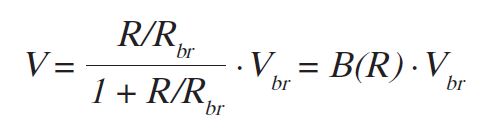
其中Rbr是分压器上电阻,R是传感器(下)电阻,Vbr是桥电压。DAS将该电压数字化并输出数字代码W(V)。然后U(W)以数字形式补偿DAS,使U=V。接下来,将U应用于第一非线性功能模块R(U)。它使用上面的分频器公式将计数U转换为RTD的电阻。(由于分频器公式的动态范围很大,经常使用浮点数学计算,因此返回的电阻值是浮点值。)
下一个非线性块将电阻转换为温度,单位为oC,是函数T(R)。这是制造商给出的传感器曲线。Y(Z)可以反转传感器函数,从而使其线性化。这个例子的目标是通过下面的等式实现Y=X:

传感器电桥电路的灵敏度与电桥电压成正比。电桥输出电压V(Vbr,R)取决于传感器输出量(即电阻),S=R,以及桥电压Vbr。它可以表示为:
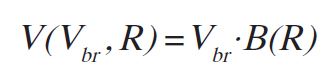
图3示出了该函数。
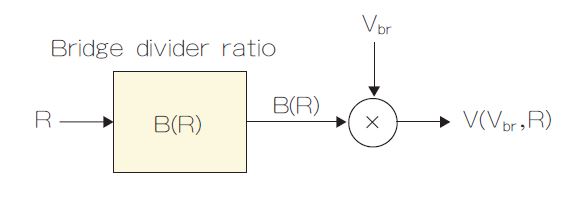
图2:传感器桥电路的灵敏度与电桥电压成正比。
“x”乘法器模块是一个附加模块,它是通过将U(W)分成两个模块来补偿的,如图3所示。
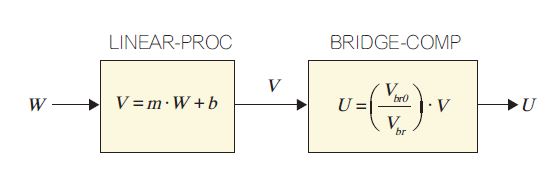
图3:“x”乘法器模块通过将U(W)分成两个模块来补偿。
U(W)补偿W(B),使得U=B(R)。此外,由电桥补偿软件执行的U(V)用校准值补偿电桥中的电压漂移。Vbr通过桥电压通道测量。最后的测量值及其校准值Vbr0用于形成补偿的比例因子。
两点校准假设传感器和DAS增益是线性的。例如,如果应力传感器增益为1V/kN,它随所施加的应力大小而变化,因此是非线性的。为得到线性变换的偏移和斜率U(W),即DAS的线性部分,μC编程通过所获得的两个数据点构造了一条线,如图4所示。w轴是原始数据,即ADC的数字化计数。u轴是按给定单位处理过的数据。利用已知输入值u1和u2进行两次测量。ADC原始数据计数输出为w1和w2。
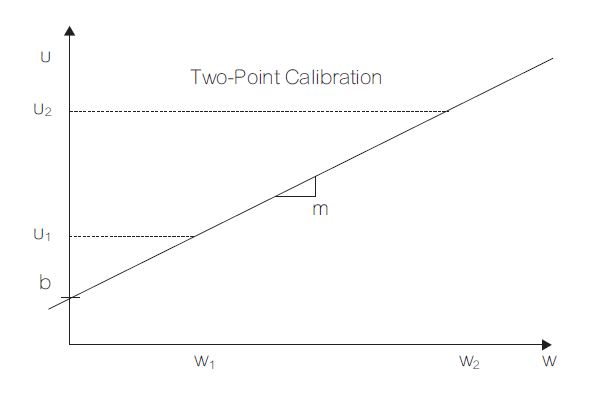
图4:μC编程通过所获得的两个数据点构造了一条线。
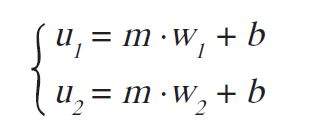
然后我们得到两个方程,可以求解斜率m和偏移量b:
由此得到两点校准的公式:
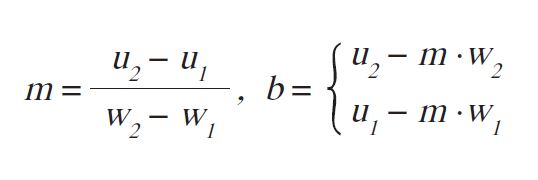
其中参数m和b用于将原始数据值转换为处理值,其单位是校准期间使用的单位。对于b,可以使用右侧表达式,也可以将两者平均。
对于一点校准,b=0(假设没有偏移误差),默认情况下第二个数据点是原点(0,0),只有斜率需要校准。
DAS(或DAQ)已经成为电子行业的一个细分领域,它涉及模拟和数字波形处理。DAS采集和处理的常见策略是“撤消”处理功能或执行采集功能的反转,这些功能必须通过模拟电路实现,因为有些是非线性的。模拟采集的每个阶段都对应一个处理阶段,以便系统在ADC处可以自动反转,采集阶段由处理阶段镜像,处理阶段可以撤消它们所做的事情,直到检测到的数量本身就是整个过程的剩余部分。
本文为《电子技术设计》2019年2月刊杂志文章。
原文刊登于ASPENCORE旗下Planet Analog英文网站,参考链接:Data Acquisition and Instrumentation: Data Processing and Calibration。)
 最前沿的电子设计资讯
最前沿的电子设计资讯

