
在两轮和三轮车辆应用中,对于发动机、变速器和车轮速度等进行控制的电子设备使用正在快速增长,特别是在发展中国家。这一趋势主要由改善全球空气质量,提高燃油效率和车辆安全性等要求驱动。
这些系统的控制需要能够在恶劣环境下工作的可靠的磁传感器和目标,其中常见的挑战是在车辆运行期间存在由电机和线圈引起的共模噪声和杂散场干扰。齿轮磨损、损坏以及目标轮混入铁屑都会导致控制信号的减小或丢失。
车辆控制中使用的两种常见传感器类型是单霍尔和差分霍尔效应传感器。虽然可以使用单霍尔效应传感器,但差分霍尔效应传感器可针对下列各种系统可靠性挑战提供卓越的解决方案。
单霍尔效应传感器产生的信号与目标齿/谷的形状有关,其中在目标轮齿形比较大时峰值场水平最好。信号基线取决于齿距和磁体设计,并且可能随着气隙和齿轮尺寸的变化而发生偏差或漂移,结果往往体现在对发动机正时控制非常重要的边缘精度降低(图1。为了减轻这些影响,需要复杂的磁体系统来提供接近零的基线场(baseline field)。另一种方法是在传感器设计中添加复杂的电路,以最小化和校正偏差或漂移。
在一些基本的两轮和三轮车辆应用中,这些传感器已经成功地用于基本的发动机或变速器控制系统,一个不断加强的趋势是某些车型正在具有更高的电气化水平,包括发动机正时和变速器控制。在这些应用中,单霍尔效应传感器通常缺乏抗杂散场和抑制噪声能力,因而不能满足较新的车型要求。
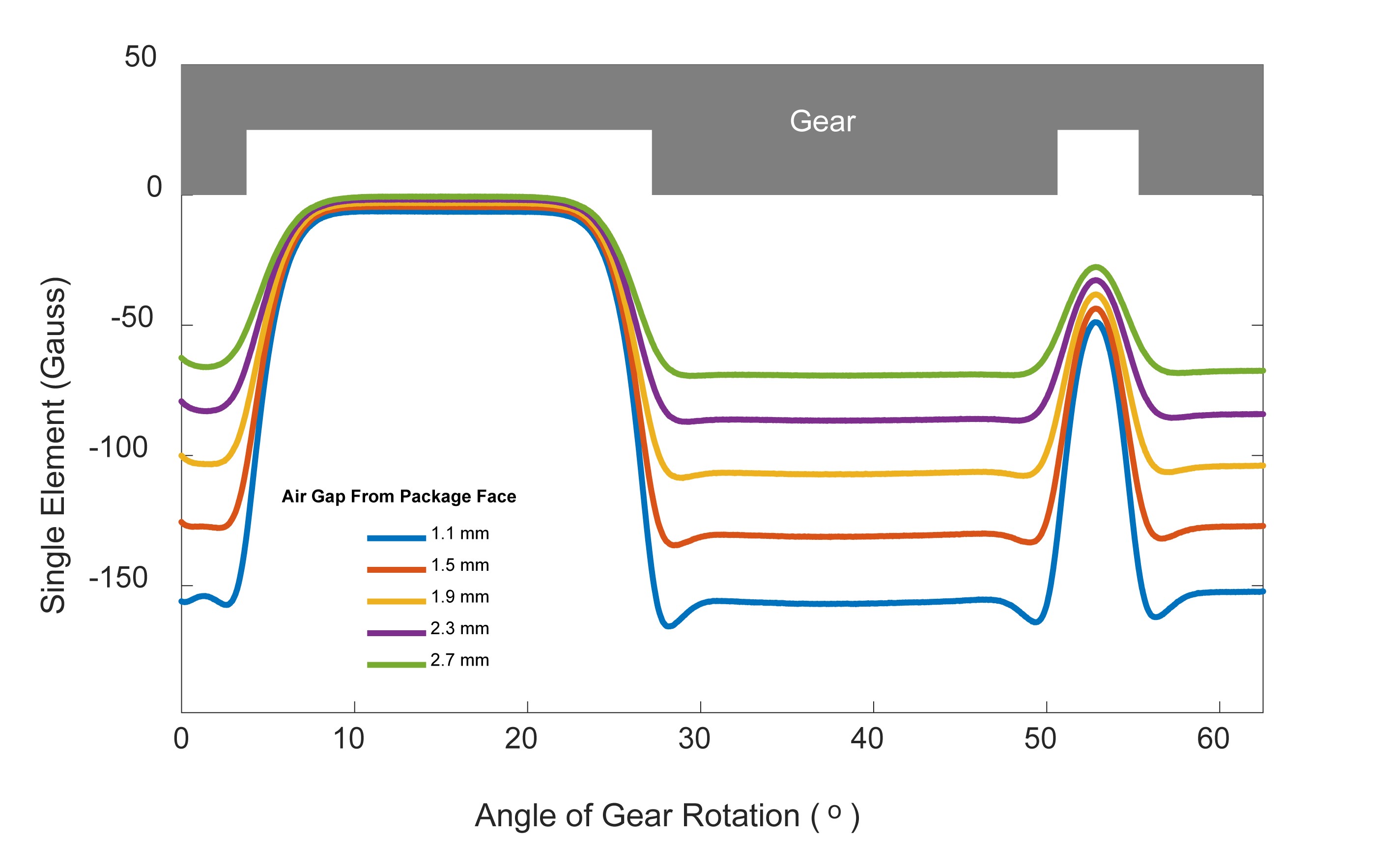
图1:单霍尔效应传感器
单霍尔效应传感器可检测大目标轮,需要注意窄小目标轮的偏差偏移。
差分霍尔效应传感器提供在目标齿/谷上进行边缘感测的信号,信号形状大致为正弦波,最高为峰-峰值磁场的两倍(图2)。
差分信号的偏差可以被补偿,所用差分信号相对零高斯对称。因而差分磁体系统可以是具有高共模磁场的简单磁体,与单霍尔效应传感器相比,这有助于改善整体气隙性能。
差分霍尔效应传感器及其相关的信号处理电路能够针对噪声和杂散场提供出色的抗干扰和共模抑制能力。通过减法和偏移降低电路可以减少由于安装公差或气隙变化引起的基线漂移。这些技术的组合能够为车辆提供所需的性能和可靠性,增强了电气化以及复杂发动机正时和变速箱控制。此外,这些传感器的边缘检测能力使它们可用于各种目标几何形状,特别是在大多数两轮车辆应用中较多的小尺寸目标轮。
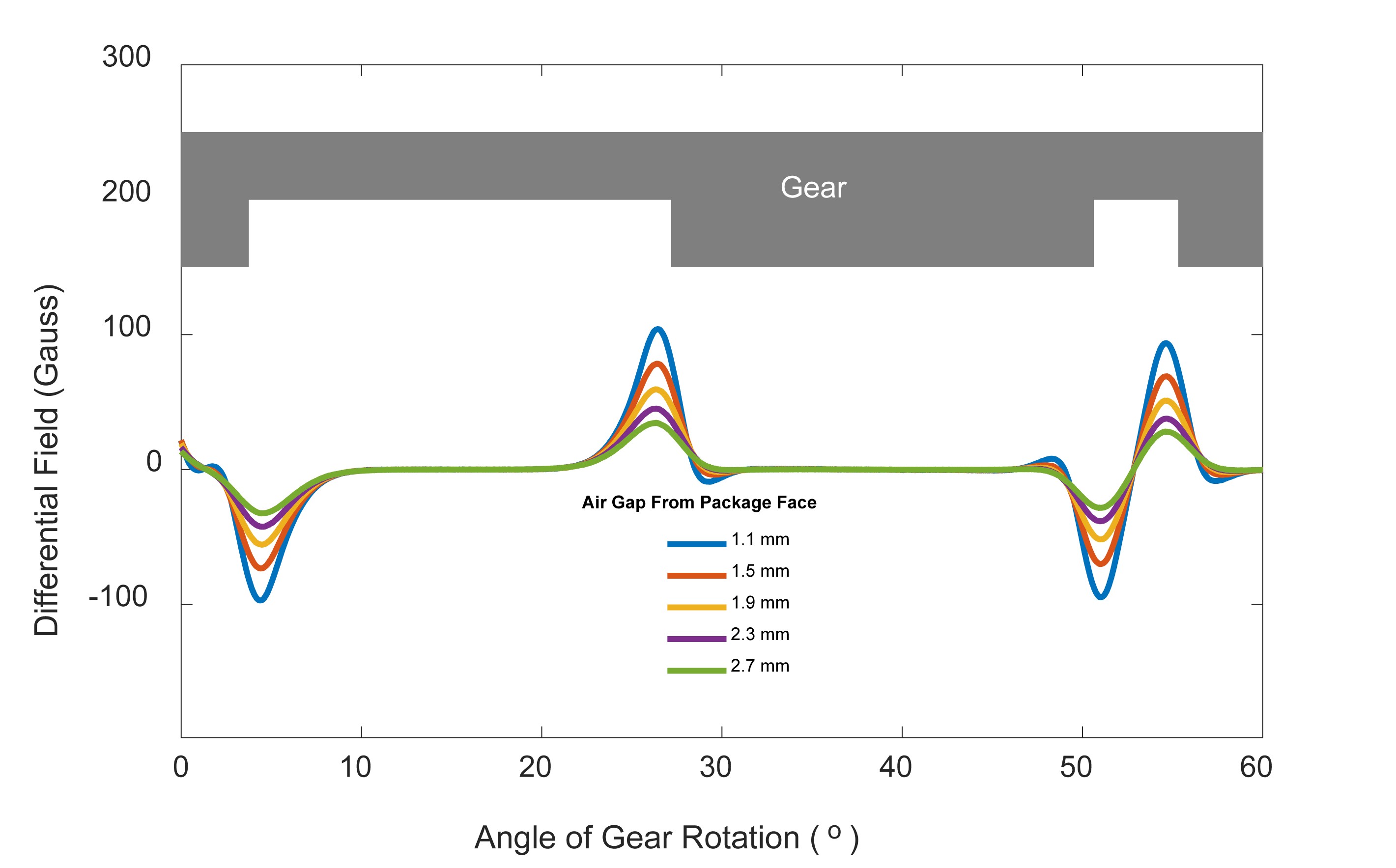
图2:差分霍尔效应传感器
差分霍尔效应传感器能够检测目标边缘,目标特征没有偏差偏移。
交流(AC)和直流(DC)产生的杂散场可存在于车辆动力传动系统和控制系统中,这对于速度或方向感测是一个很大挑战。单霍尔效应传感器无法补偿或抑制DC和AC杂散场。在图3中,水平虚线表示器件开关点电平(例如625 G和635 G),在无杂散场条件下能够输出切换。在有DC杂散场时,由DC杂散磁场带来的信号漂移使磁场水平漂移到切换点阈值之外,导致没有切换和输出平坦线。同样,如果存在AC杂散场,也不能充分地抑制噪声,并使器件围绕噪声频率“颤动”,如输出开关波形所示(图3)。这种增大的噪声可能导致系统控制和时序错误,因而可能会影响车辆的可靠性和性能。
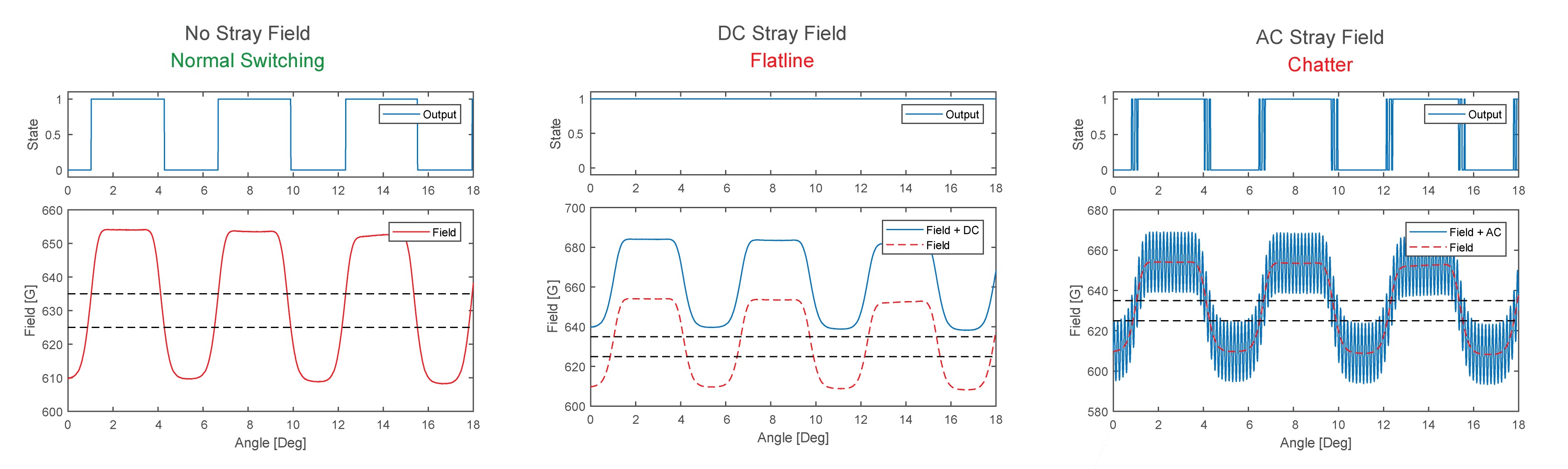
图3:杂散场干扰对单霍尔效应器件的影响。
单霍尔效应传感器无法充分消除或抑制杂散场干扰。
能够减轻杂散磁场影响并减少或消除AC和DC干扰信号的解决方案是差分霍尔效应传感器。差分配置和电路能够取消施加到传感器霍尔探头的共模场。 Allegro的独特差分架构进一步提高了传感器性能和抗外部干扰的稳定性。
图4显示了正常运行与存在AC和DC杂散场干扰条件下的比较。在DC杂散场存在时,上两条迹线显示施加到每个霍尔效应元件的DC场,下部的迹线则是后续的差分输出,这显示了消除和保持基线接近零高斯的效果。在AC杂散场示例中,AC共模噪声施加于每个霍尔效应元件,由于传感器差分输入和共模噪声消除(抑制),能够得到干净的差分输出(下部迹线)。在两种杂散场情况下,都能保持信号完整性和正确的输出切换。此外,差分霍尔效应传感器还可以同时处理DC和AC都同时存在的情况。
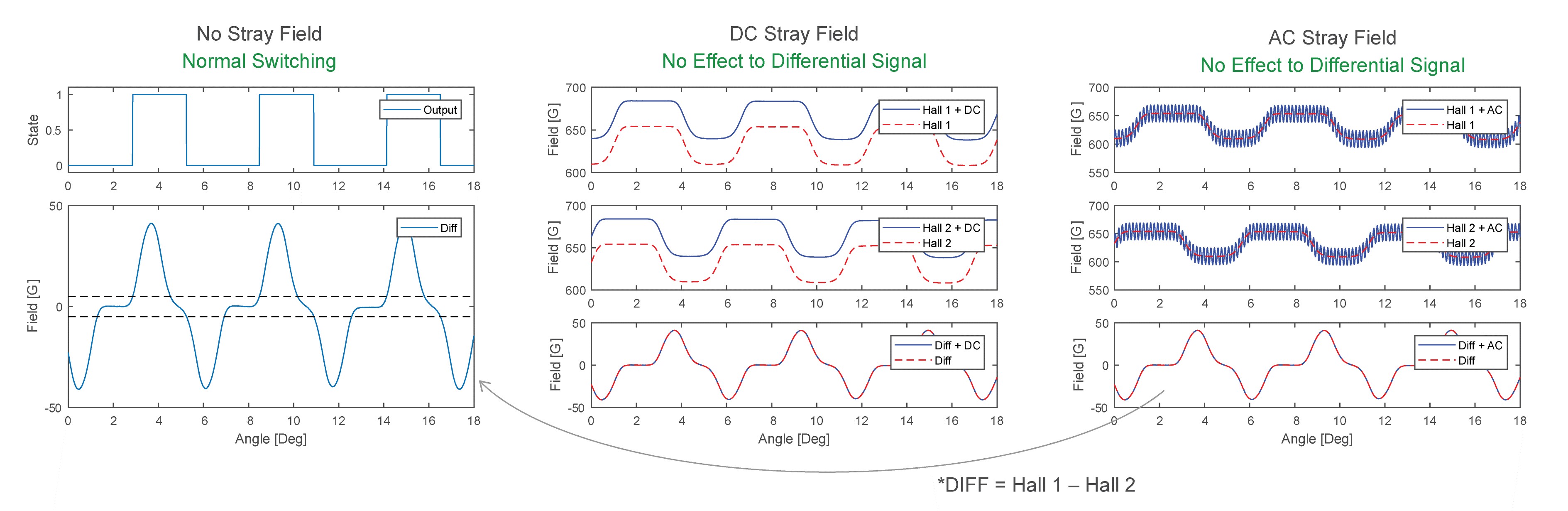
图4:杂散场干扰对差分霍尔效应器件的影响。
差分霍尔效应传感器能够消除并抑制杂散场干扰。
虽然单霍尔效应传感器的运行与安装方向无关,但安装后可能会发生位置变化,这种位置变化或许引起偏移和信号幅度减小。图5显示了可能的传感器位移情况,这些位置变化导致与绝对(安装)值产生偏差,从而出现DC偏移。图6例证显示了偏差可以导致信号电平下降到低于开关阈值(虚线),导致没有切换和输出平坦线。
通过使用差分传感器,可以消除由于安装位置变化引起的任何偏移,并保持基线接近零高斯。这可确保信号保持在器件切换阈值范围内,从而无论位置如何变化,都能保持正常切换(图7)。
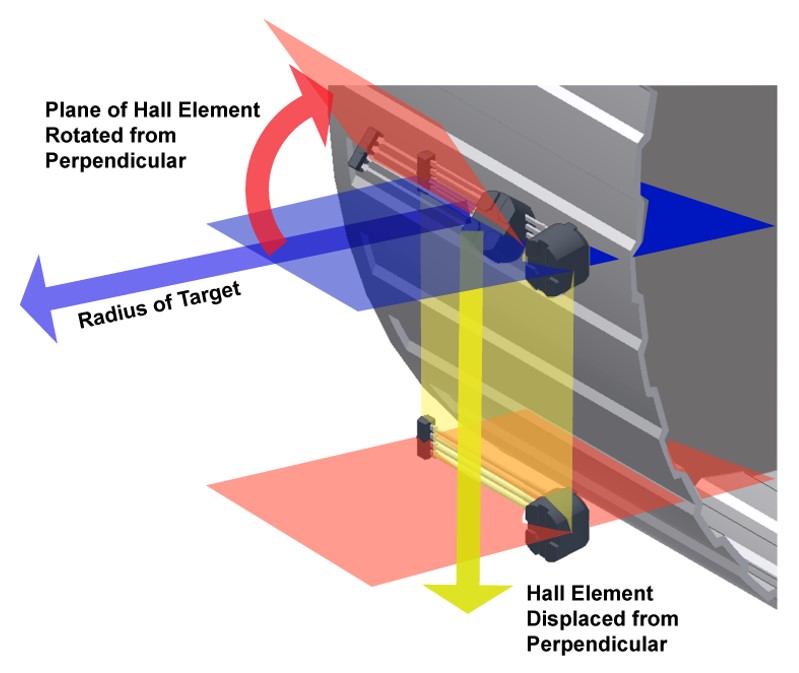
图5:霍尔效应传感器针对目标的方位。
安装后可能的位置变化。
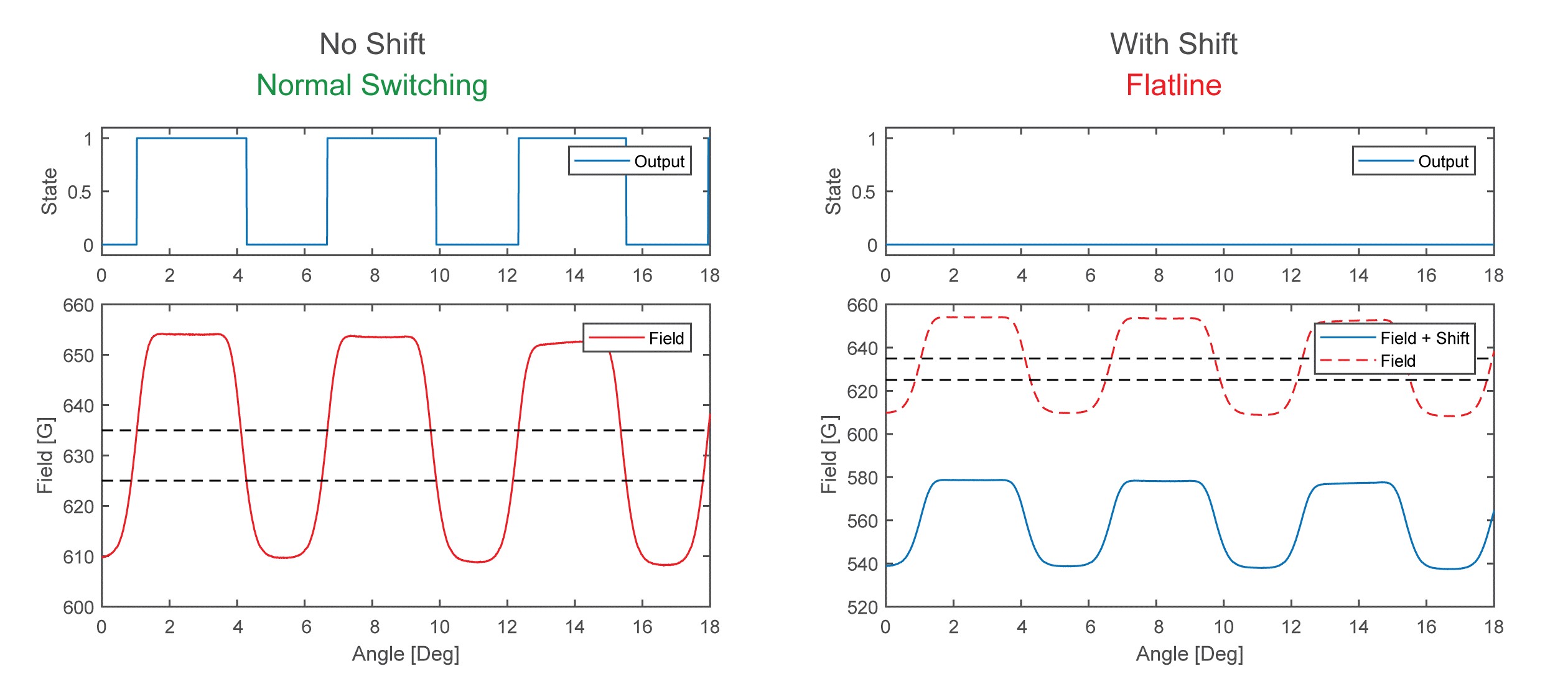
图6:安装引起的偏移对单霍尔效应传感器的影响。
单霍尔效应传感器容易出现输出平坦线,没有切换

图7:安装引起的偏差偏移对差分霍尔效应传感器的影响。
差分霍尔效应传感器能够保持正常输出切换。
“突然”是指从一个目标特征(齿轮齿和谷)到下一个目标特征的气隙变化,而这种变化并不是给定目标轮正常特征的一部分。例如,突然的气隙变化可能是由齿弯曲或缺失造成的损坏或铁质物体和碎屑侵入目标轮表面引起的。图8示出了由于齿弯曲导致目标轮气隙减小以及单霍尔效应传感器和差分霍尔效应传感器产生的相关磁场信号示例。
在采用单霍尔效应传感器时,气隙变化导致偏差偏移和幅度变化超出切换阈值(虚线)。一旦信号到达此点,传感器就会停止切换并输出平坦线。
差分霍尔效应传感器能够消除偏差偏移量,并可测量信号幅度变化,结果信号保持基线接近零高斯。这能够使信号在器件切换阈值内,从而确保器件继续提供输出切换,而不受偏差偏移和气隙减小影响。
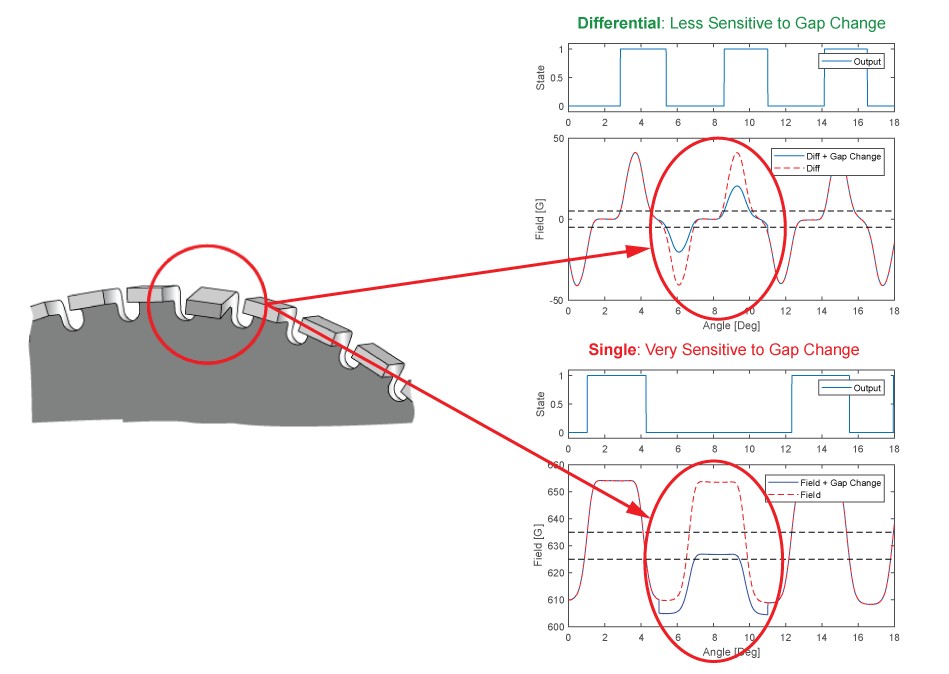
图8:突然气隙变化引起的偏移对霍尔效应传感器的影响。
单霍尔效应传感器对气隙变化非常敏感, 差分霍尔效应传感器对气隙变化灵敏度较低。
在目标轮旋转时,可以发生逐渐的或突然的气隙变化,导致动态气隙变化。 目标轮每转一圈这种不连续性通常一致,, 最终结果是信号振幅的变化体现多个目标轮信号特性。 这种情况下,要求传感器能够适当地适应变化的信号,以便可以继续切换。
对于两轮和三轮车辆应用,一种形式的气隙动态变化是目标轮跳动或摆动。 跳动是一种与目标轮每次旋转相关的气隙变化,并且是逐渐地(在多个齿上)发生,如图9所示。一些常见的原因包括轴位置偏心、目标轮偏心、目标轮损坏/翘曲或在轴/轴承上产生了其他载荷。
总有效 气隙(TEAG)
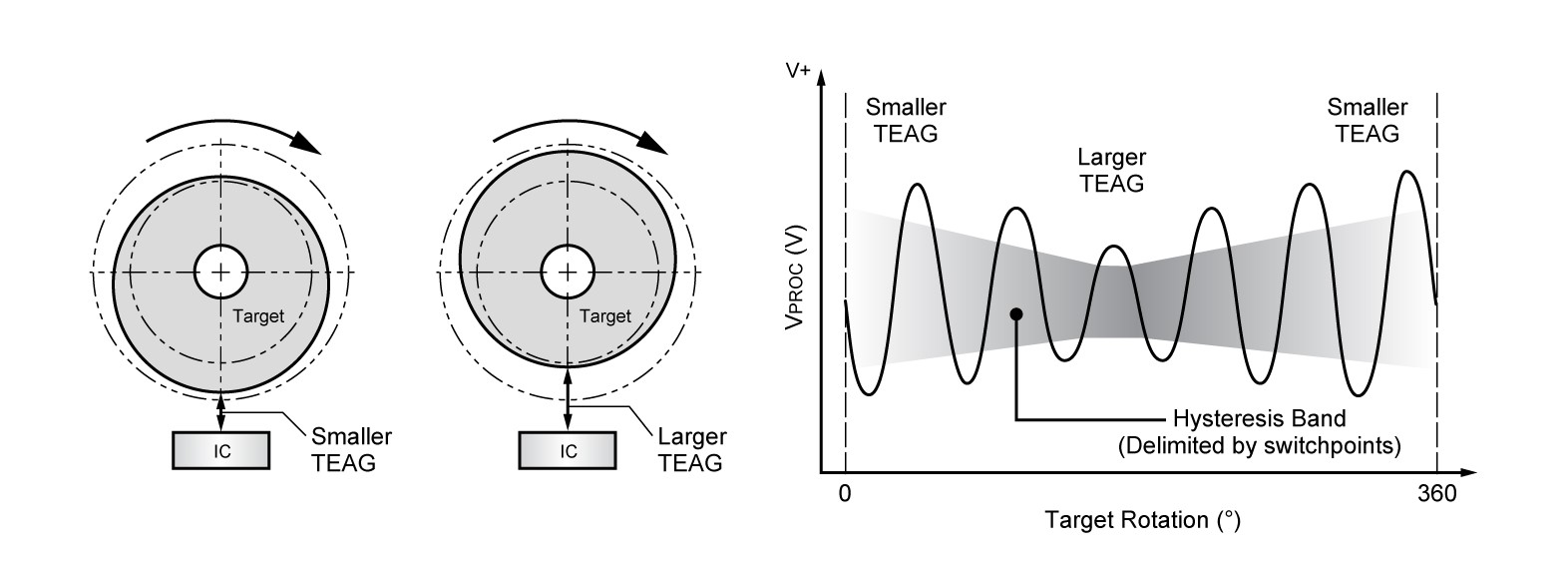
图9:跳动/摆动对总有效气隙(TEAG)的影响。
使用单霍尔效应传感器发生跳动或摆动时,通过测量偏差和幅度变化,信号可能会降至开关点阈值以下并丢失,致使速度脉冲丢失(图10),导致出现系统错误或故障。
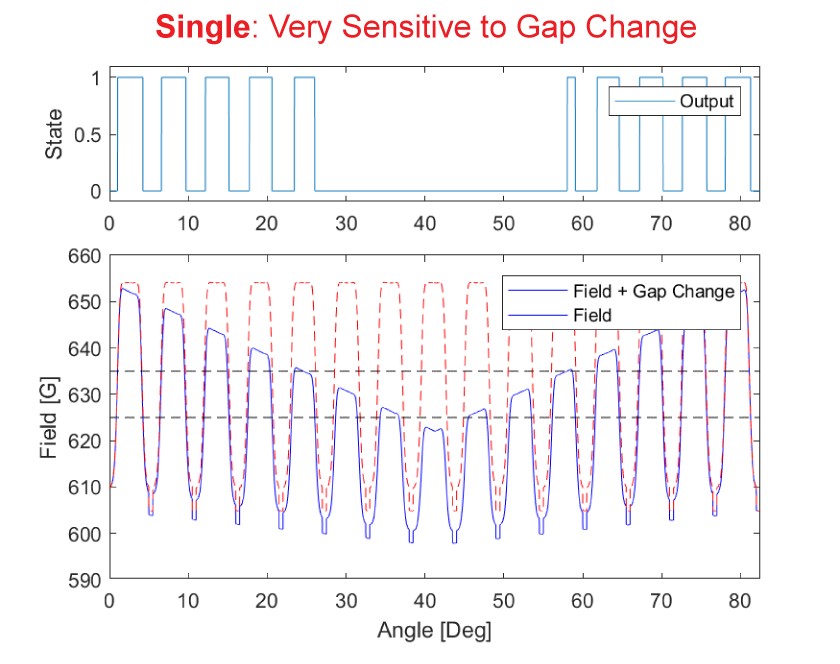
图10:跳动/摆动对单霍尔效应传感器的影响。
单霍尔效应传感器对气隙变化非常敏感。
差分霍尔效应传感器能够消除偏差,防止基线偏移(图11),使信号保持在器件切换点阈值的中心,即使在信号变化的情况下也能继续正确切换。
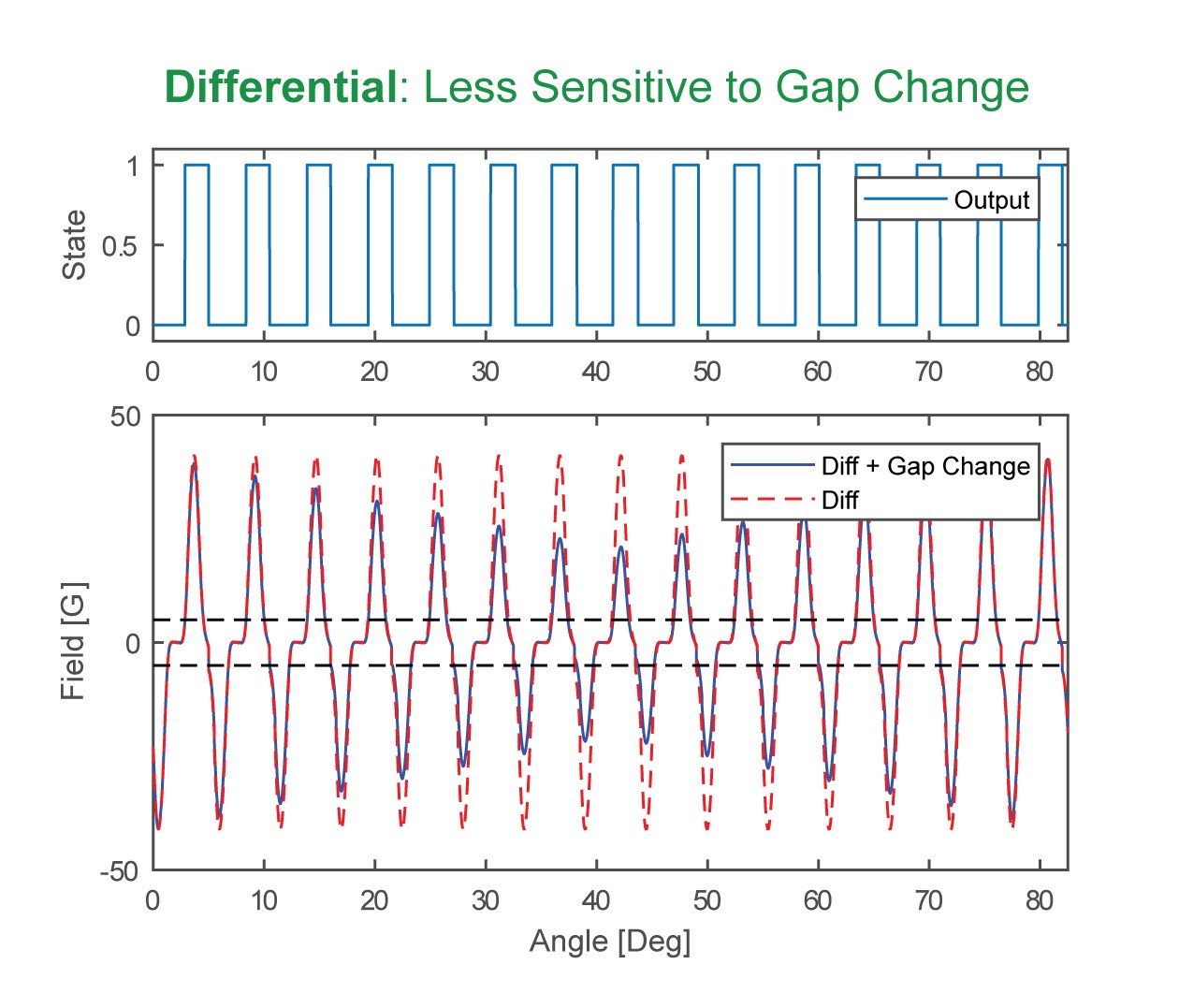
图11:跳动/摆动对差分霍尔效应传感器的影响。
差分霍尔效应传感器对气隙变化不太敏感。
两轮和三轮车辆的电气化程度将继续变得越来越高,为了实现发动机、变速箱和轮速电子控制的最安全、最可靠性能,差分霍尔效应传感器是优于单霍尔效应传感器的出色解决方案。
为了进一步改善信号完整性和系统性能,请考虑以下建议:
 最前沿的电子设计资讯
最前沿的电子设计资讯
