
工业自动化的下一步演进,需要让机器独立调整其性能参数以完成工厂操作员所分配的任务,或者根据提高生产率的人工智能观测器算法的输入重新配置自身来优化其行为。具有自感知机器的价值在于它能够最大限度地提高生产力、延长设备的使用寿命并降低维护成本。
自感知是指基于对系统功能和系统性能目标的理解而对系统本身有所了解的一种系统。事实上,自感知运动控制系统需要实现可以解释传感器输入和所需系统参数的多个控制回路,并提供将其自身操作行为与所需系统性能进行比较的能力。为了实现这些目标并创建自感知的运动控制系统,需要创建一个自适应运动控制代理来监控系统的动作,并根据驱动系统的工作环境动态调整其性能。
本文探讨的重点是提供一种方法,利用自主代理来检测和监控不断变化的工作环境条件,从而实现自感知运动控制系统。这些条件源自一系列从现场层驱动器获取运动参数的嵌套闭环实时性能模型。一旦推导出了驱动系统的电气和机械模型,就能用该模型比较和调整自动化金字塔的监督、计划或管理层所要求的期望系统性能(图1)。当自动化金字塔监督部分以上的任何一层都对新的系统性能提出要求时,就会将一组新的控制参数传递到运动控制系统的自适应控制部分。然后,系统就会通过调整其性能来响应新的性能请求。
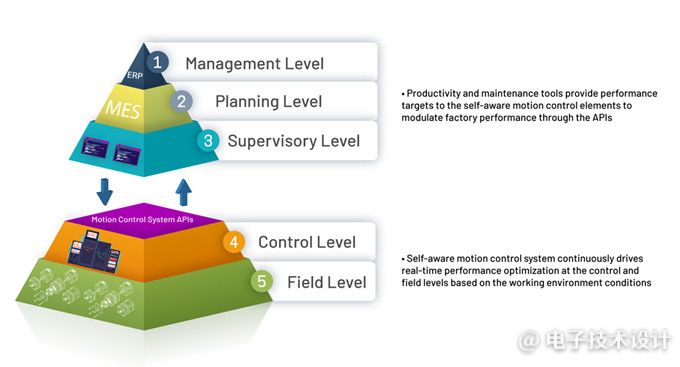
图1:自动化金字塔。
实现自感知运动控制系统的两个主要优点,是能够实时自动调节和最大化运动控制系统性能。这种新功能使得自动化金字塔的监督、计划和管理层有机会通过实现生产力的提高来调节自感知运动控制系统。
让我们来研究一个自感知运动控制概念图,以便更好地理解实现一个自感知运动控制所需的四个基本元素。
自感知运动控制适用于哪些应用场景?又涉及到哪些关键半导体技术?2022年11月10日,AspenCore将在深圳大中华交易中心举办"IIC Shenzhen - 2022国际集成电路展览会暨研讨会",同期举办的“国际工业4.0技术与应用论坛”将邀请兆易创新和意法半导体的技术专家出席演讲,与观众们交流和分享行业趋势及最新技术。点击这里或扫描下方二维码报名参加!
为了实现这种级别的自感知运动控制,需要开发一个控制系统图。图2展示了成功实现自感知运动控制所需的四个关键要素。
为实现这一目标,系统需要建立明确的目标或任务。在本文后面描述的示例中,这意味着要以最佳方式将啤酒杯从A点移动到B点,以免洒出任何啤酒。
一旦建立了这个目标,自感知运动控制图的下一个层次就会启动所需的运动行为。以我们的啤酒杯为例,也即使用线性运动来移动啤酒杯,同时自动调整其运动,以在机械系统所需的控制安全限制内补偿啤酒杯的不同重量和尺寸。
一旦建立了目标和期望的系统行为,自适应控制引擎就会通过自动调整运动控制驱动及其集成机械系统,动态驱动核心驱动系统的运动学和其配套机械系统之间的收敛,从而在其独特的工作环境中运行时达到最佳运行性能。
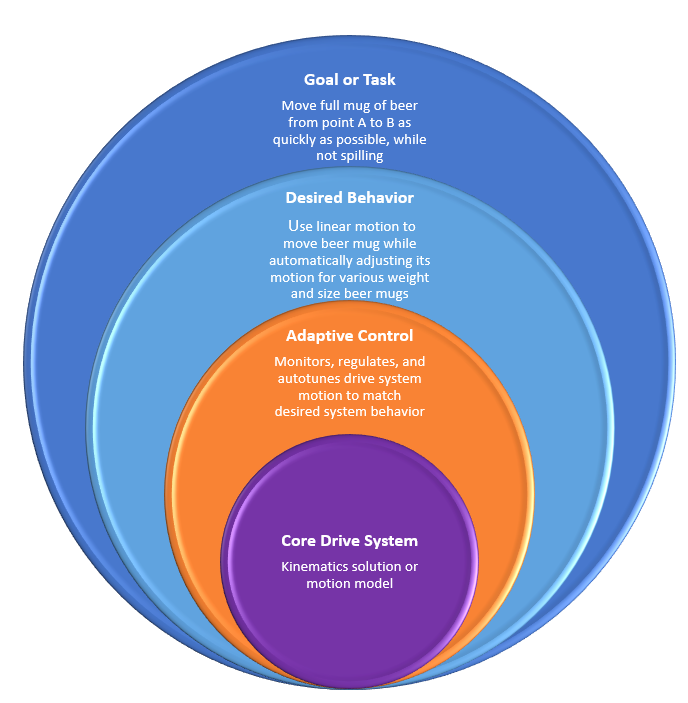
图2:自感知运动控制概念图。
自感知运动控制系统的核心是其运动学。其挑战在于观察、学习和监控电机和驱动系统的性能。要创建驱动系统的工作模型,需要实现一个智能观察器,以从根本上了解其运动参数及其物理限制。这可以通过带有专用位置传感器的磁场定向控制(FOC)或无传感器的FOC方法,了解电机在工作环境中如何受力和反应来实现。通过监控和自动调整电机转矩磁通电流环、速度环和位置环的控制参数值,我们可以优化驱动系统响应。一旦收集到这些信息的数据报并将其输入智能观察器,就可以实施一种优化算法以确保对这些运动控制参数进行计算,并且使基本运动控制算法收敛到一组最佳运动参数(图3)。既然创建了一个间接运动模型来建模和优化驱动系统的运动,我们可以通过引入自适应控制引擎来实现下一级自感知运动控制解决方案。
这个视频提供了一个来自Trinamic(现在是ADI的一部分)的典型自动调整工具,借此就可实现优化的运动控制值。
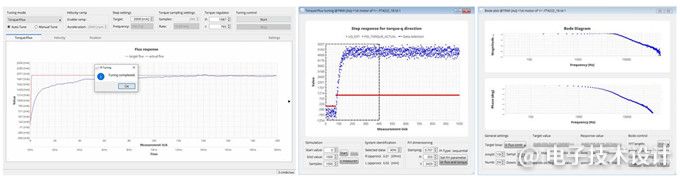
图3:转矩磁通电流环、速度环和位置环的监控和自动调整。
基于我们系统的运动学和FOC自动调节能力,我们现在可以将重点放在实现自感知运动控制的下一个级别——自适应控制引擎。智能运动的下一个层次侧重于将所需的系统行为传递到自适应控制引擎(图4)。该系统行为由生产员工或工厂主管提供,或者由AI生产力算法通过其智能传感器网络收集工厂数据而生成。一旦期望的行为被传递给自适应控制引擎,自感知的运动控制系统就会开始动态地重新配置驱动系统的操作参数以匹配期望的系统行为。这些期望行为的一些示例是要求增加工厂吞吐量或通过在安全模式下运行来延长电机的使用寿命。当运动控制系统自动调整其运动控制参数以实现这种所需新性能水平时,自适应控制系统就会连续地监视闭环系统以保持其期望的性能水平。即使驱动系统由于机械系统的磨损或遇到电机工作环境的变化而发生变化,这种状态也会保持下去。现在,该系统已经达到了自感知运动控制的最佳水平。
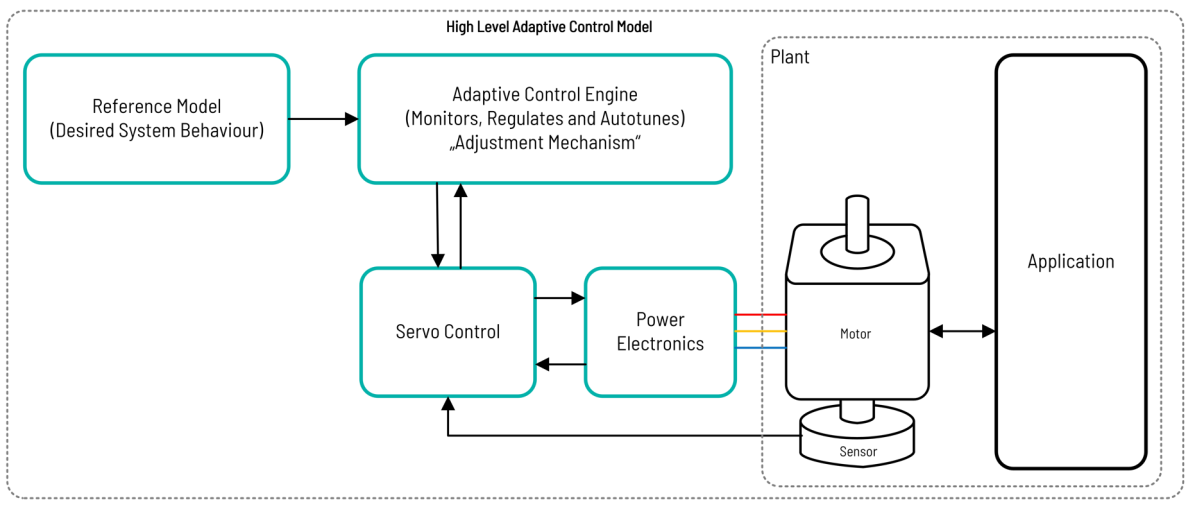
图4:自适应控制模型。
也许展示这个概念最好的方法是使用一个真实例子(图5)。这个例子与所有啤酒爱好者有关,他们希望确保自己的啤酒泡沫杯可以从吧台的一端从调酒师传递过来,而不会在这个过程中洒出一滴啤酒。让我们来看看这个例子是如何与实现自感知运动控制系统相关的。这项任务的目标是在尽可能快的时间内将啤酒从调酒师(A点)送到坐在吧台另一端的顾客(B点),而不会洒出一滴啤酒。在这种情况下,工厂系统是一个带有内置重量检测器的杯架,用于检测各种尺寸啤酒杯的重量,并使用线性电机将其从吧台的一端移动到另一端。
让我们想想这个例子:自感知运动控制系统有利于在最短的时间内把啤酒送到顾客手中,但是如果顾客把空或半空的啤酒杯放回杯架,它也能自动调整其速度和性能,把啤酒杯还给调酒师续杯或者处理掉。如果调酒师使用不同尺寸的玻璃杯来装其他类型的饮料,将其运送给顾客,该系统也可用于调整其性能。
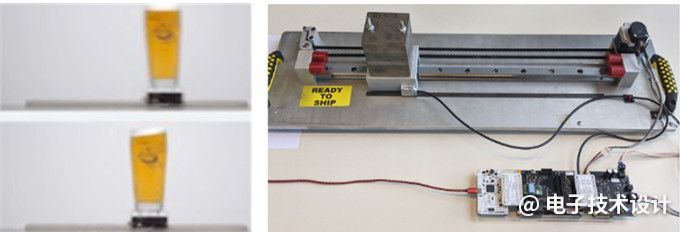
图5:运行中的自感知运动控制例子(不同的负载质量)。
虽然这听起来像是科幻小说,但自感知运动控制技术的发展正在为其首次亮相进行微调。可以想象某个工厂整个都是基于使用自感知电机和智能传感器的设备。这样一家革命性的工厂将拥有先进的能力,可以自行纠正可能出现的设备故障,自动调整生产流程来最大限度地提高生产力,并延长整个工厂车间设备的使用寿命。欢迎来到自感知运动控制和下一步工业革命的激动人心的新世界!
(原文刊登于EDN姐妹网站Power Electronics News,参考链接:The Next Evolution in Industrial Automation: Self-Aware Motion Control,由Franklin Zhao编译。)
本文为《电子技术设计》2022年10月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。
 最前沿的电子设计资讯
最前沿的电子设计资讯

