
据新一期的《科学进展》杂志,美国北卡罗来纳州立大学的研究人员开发出了一种节能的软体机器人,它的游泳速度比以前的游泳软体机器人快4倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于人类蝶泳时手臂的动作。
研究人员表示:“到目前为止,游泳软体机器人的游泳速度还不能超过每秒一个身体长度,但海洋动物,如蝠鲼,能够游得更快、更有效率。” 与目前同类软体机器人每秒最快可以游大约1个身长相比,受蝠鲼生物力学启发,研究人员开发的两种类型蝴蝶机器人速度均超过现有机器人一大截。专门为速度而打造的机器人,平均速度能达到每秒3.74个身体长度。另一个被设计成机动性很强,能够向右或向左急转弯,这种机动原型机器人速度能达到每秒1.7个身体长度。
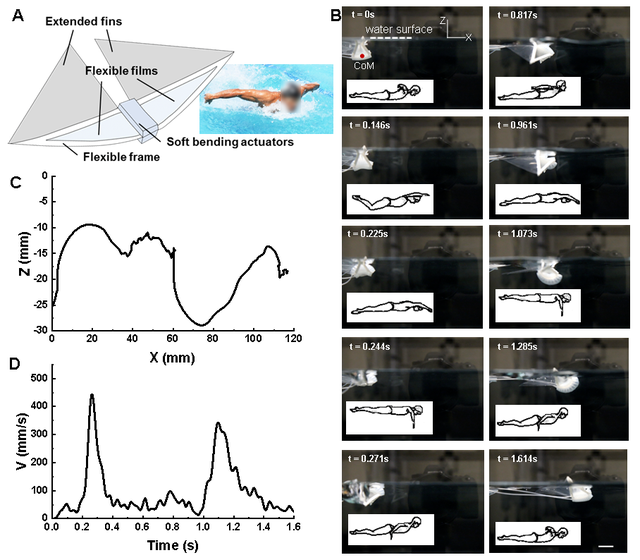
蝴蝶机器人的游泳动力来自它们的翅膀,它们的翅膀是“双稳态的”,这意味着翅膀有两种稳定状态。翅膀类似于一个按扣发夹,发夹初始状态是稳定的,除非施加一定量的能量,直到能量达到临界点时,发夹就会扣成一个不同的形状,这个状态也是稳定的。而研究人员们发现翅膀扇动的轨迹类似于数字8,这与蜂鸟和黄蜂翅膀的轨迹非常类似。为了实现这种复杂轨迹,往往需要很多复杂的连接结构来组成传动系统。但软体机器人却可以通过很简单的设计达到这种效果。

在蝴蝶机器人中,受发夹启发的双稳态翅膀被连接到一个柔软的硅胶体上。通过将空气注入软体内部的腔室来控制翅膀在两种稳定状态之间的切换。当这些腔室充气和放气时,机身就会上下弯曲,从而带动两翼的突跳(snapping)快速上下摆动与旋转,通过驱动器的充放气使得翅膀在往上和往下弯曲的状态来回切换。
研究空气动力学和生物力学的研究人员使用一种叫做Strouhal数的东西来评估飞行和游泳动物的能量效率。当动物游泳或飞行时,Strouhal数在0.2和0.4之间,推进效率达到峰值,而这两款蝴蝶机器人恰好在这个范围内。
蝶泳软机器人性能与姿态
偏向速度的蝴蝶机器人只有一个“驱动单元”软体来控制它的两个翅膀,这使得它速度非常快,但很难向左或向右转弯。可操控的蝴蝶机器人则有两个驱动单元,它们并排连接。这种设计允许用户操纵两边的翅膀,或者只“扇动”一个机翼,这就是使它能够进行急转弯的原因。
该团队论文的通讯作者Jie Yin教授说:“这项工作是一个令人兴奋的概念证明,但它有局限性,最明显的局限是,目前的原型机器人被细长的管子拴住了,这是我们用来将空气泵入中央机构的。我们目前正在努力开发一个无拴的、自动的版本。“
所以尽管蝴蝶机器人取得了令人印象深刻的成就,但北卡罗来纳州立大学的研究团队仍有更多工作要做,以改善他们的水生创造。速度是一方面,它的主要限制因素之一是执行器的带宽,在当前状态下,执行器被限制在大约1 Hz,而机翼的固有频率约为13.5 Hz。如果机器人要实现更高的速度,开发人员必须增加“抖动”频率以提供最大的提升。
此外,研究人员还确定了系留空气供应和未优化的机翼形状以改进未来的设计,如果该项设计得到更进一步的完善,蝶泳软体机器人就可以克服阻力在水里灵活穿梭,有望成为环保小帮手,用于海面油污清理和富营养化治理。
 最前沿的电子设计资讯
最前沿的电子设计资讯
