

电动汽车 (EV) 牵引逆变器是电动汽车的核心。它将高压电池的直流电转换为多相(通常为三相)交流电以驱动牵引电机,并控制制动产生的能量再生。电动汽车电子产品正在从 400V 转向 800V 架构,这有望实现:
在牵引逆变器中,微控制器 (MCU) 是系统的大脑,通过模数转换器 (ADC) 进行电机控制、电压和电流采样,使用磁芯计算磁场定向控制 (FOC) 算法,并使用脉宽调制 (PWM) 信号驱动功率场效应晶体管 (FET)。对于 MCU,向 800V 牵引逆变器的转变对其带来了三个挑战:
在本文中,我们将讨论基于 Arm® 的 Sitara™ AM2634-Q1 和 C2000™ MCU 等器件如何应对这些挑战。
为了控制牵引电机的扭矩和速度,MCU 使用外设(ADC、PWM)和计算内核的组合来完成控制环路。随着转向 800V 系统,牵引逆变器也转向宽带隙半导体(例如 SiC),因为它们在 800V 时大大提高了效率和功率密度。为了实现 SiC 所需的更高开关频率,这种控制环路延迟成为优先事项。低延迟控制环路还使工程师能够以更高的转速运行电机,从而减小电机的尺寸和减轻重量。要了解并缩短控制环路延迟,您必须了解控制环路信号链及其各个阶段,如图 1 所示。
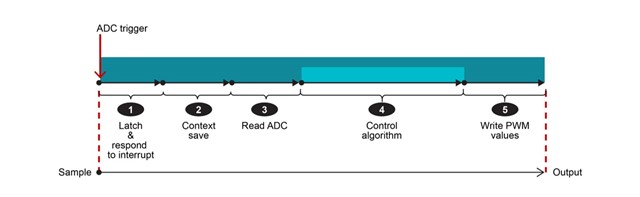
图 1:控制环路信号链
为获得出色的实时控制性能,您必须优化整个信号链,包括硬件和软件。从 ADC 采样(来自电机的输入)到写入 PWM(输出以控制电机)所花费的时间是实时控制性能的基本衡量标准。从 ADC 采样开始,逆变器系统需要准确快速的采样,即实现高采样率、至少 12 位分辨率和低转换时间。一旦可进行采样,它需要通过互连传输到处理器并由处理器读取,并优化的总线和内存访问架构缩短延迟。在处理器中,内核需要使用 FOC 算法根据电机的相电流、速度和位置计算下一个 PWM 步骤。
为了更大限度地减少计算时间,内核需要较高的时钟速率并且必须高效地执行特定数量的指令。此外,内核需要执行一系列指令类型,包括浮点、三角和整数数学指令。最后,内核再次使用低延迟路径将更新后的占空比写入 PWM 发生器。在 PWM 输出上应用死区补偿将防止在切换高侧和低侧 FET 时发生短路,最好在硬件级别应用以减少软件开销。
TI MCU 的牵引逆变器控制环路延迟低至 2.5µs,AM2634-Q1 的延迟小于 4µs。这种级别的控制环路延迟将面向包括 SiC 架构的未来设计,。
由于牵引逆变器提供电力来控制电机,因此它们本质上是功能安全型关键系统。由于 800V 系统有可能提供更高的功率、扭矩、速度(或三者兼而有之),因此牵引系统需要功能安全达到汽车安全完整性等级 (ASIL) D 级要求。功能安全系统的一个关键部分是 MCU,因为它需要智能地做出安全响应系统故障的决策。因此,使用通过 ASIL D 认证的MCU是一个重要的安全元素。
为了让工程师更轻松地满足特定于牵引逆变器的系统安全要求,TI MCU 提供了额外的功能。例如,相电流反馈表示有关电机扭矩的信息,这使得这些信号对安全至关重要。因此,许多工程师更喜欢对相电流进行冗余采样,这意味着 MCU 必须具有多个独立的 ADC。
工程师面临的另一个挑战是在出现故障时能够快速将电机置于安全状态,例如续流。在 AM2634-Q1 器件中,故障通用输入(用于过流、过压或高速故障)会进入到创新的可编程实时单元 (PRU)。在 PRU 中执行的固件可以正确评估和响应故障类型并执行所需的 PWM 保护序列,如图 2 所示,然后根据需要直接将 PWM 置于安全状态。这些操作发生在短短 105ns 内。此外,由于固件是用户可进行编程的,因此工程师可以在必要时添加额外的自定义逻辑来满足他们的应用要求。
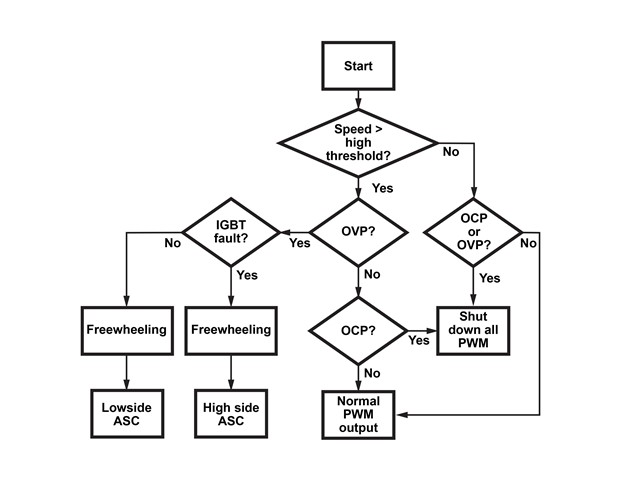
图 2:流程图显示了基于故障输入的 PWM 输出的预期保护行为
随着越来越多电动汽车的生产,设计趋势将转向 SiC 和 800V 技术,同时需要提高电机控制性能并满足牵引逆变器的功能安全要求。随着世界朝着电气化方向发展,性能和效率方面的创新对于帮助汽车工程师设计下一代电动汽车至关重要。
德州仪器(TI)(纳斯达克股票代码:TXN)是一家全球性的半导体公司,致力于设计、制造、测试和销售模拟和嵌入式处理芯片,用于工业、汽车、个人电子产品、通信设备和企业系统等市场。我们致力于通过半导体技术让电子产品更经济实用,创造一个更美好的世界。如今,每一代创新都建立在上一代创新的基础之上,使我们的技术变得更小巧、更快速、更可靠、更实惠,从而实现半导体在电子产品领域的广泛应用,这就是工程的进步。这正是我们数十年来乃至现在一直在做的事。欲了解更多信息,请访问公司网站www.ti.com.cn。
所有注册商标和其它商标均归其各自所有者专属。
 最前沿的电子设计资讯
最前沿的电子设计资讯
