
伊利诺伊大学香槟分校、西北大学和合作机构的研究人员表示,混合“eBiobots”是第一个结合软材料、活体肌肉和微电子技术的机器人。他们在《科学机器人》杂志上描述了他们的厘米级生物机器。
“集成微电子技术允许生物世界和电子世界合并,两者都有自己的许多优势,现在可以生产这些电子生物机器人和机器,这些电子生物机器人和机器可用于未来的许多医疗、传感和环境应用,”研究说伊利诺伊州生物工程教授兼格兰杰工程学院院长拉希德·巴希尔 (Rashid Bashir) 的共同领导者。
Bashir 的团队率先开发了生物机器人,这是一种小型生物机器人,由在柔软的 3D 打印聚合物骨架上生长的小鼠肌肉组织提供动力。他们在 2012 年展示了步行生物机器人,在 2016 年展示了光激活生物机器人。光激活为研究人员提供了一些控制,但实际应用受到如何在实验室环境之外将光脉冲传递给生物机器人的问题的限制。

远程控制转向允许 eBiobots 绕过障碍物,如这张穿越迷宫的双足机器人的合成图像所示。
这个问题的答案来自西北大学教授 John A. Rogers,他是柔性生物电子学的先驱,他的团队帮助集成了微型无线微电子学和无电池微型 LED。这使研究人员能够远程控制 eBiobots。
为了使生物机器人能够在实际应用中自由移动,研究人员开始着手消除笨重的电池和系绳。休斯顿大学生物医学工程助理教授、共同第一作者 Zhengwei Li 说,eBiobots 使用接收线圈来收集能量并提供稳定的输出电压来为微型 LED 供电。
研究人员可以向 eBiobots 发送无线信号,促使 LED 发出脉冲。LED 刺激光敏工程肌肉收缩,移动聚合物腿,使机器“行走”。微型 LED 的针对性很强,可以激活肌肉的特定部分,使 eBiobot 转向所需的方向。
研究人员使用计算模型来优化 eBiobot 设计和组件集成,以实现稳健性、速度和可操作性。伊利诺伊州机械科学与工程学教授 Mattia Gazzola 领导了 eBiobots 的模拟和设计。Gazzola 和共同第一作者、Gazzola 实验室的博士后研究员 Xiaotian Zhang 说,支架的迭代设计和增材 3D 打印允许快速循环的实验和性能改进。
共同第一作者 Youngdeok Kim 表示,该设计允许未来可能集成额外的微电子设备,例如化学和生物传感器,或 3D 打印的脚手架部件,用于推动或运输生物机器人遇到的东西等功能。伊利诺伊州的研究生。
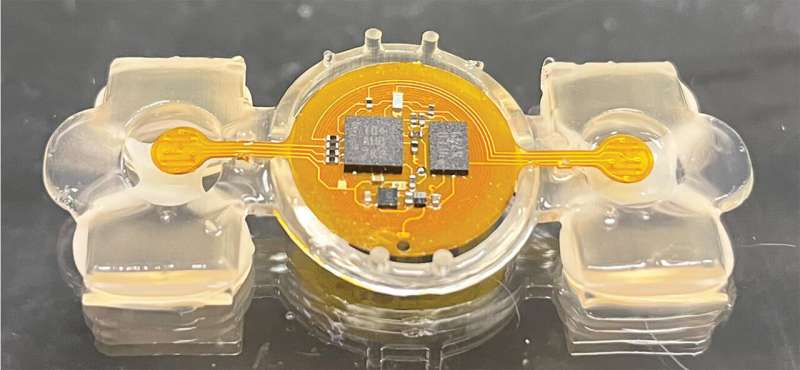
eBiobots 是第一台无线生物混合机器,结合了生物组织、微电子和 3D 打印软聚合物。
研究人员表示,电子传感器或生物神经元的集成将使 eBiobots 能够感知和响应环境中的毒素、疾病的生物标志物以及更多可能性。
“在开发有史以来第一个混合生物电子机器人时,我们为医疗保健创新应用的新范式打开了大门,例如原位活检和分析、微创手术甚至人体内的癌症检测,”Li说。
Demi Xia编译
 最前沿的电子设计资讯
最前沿的电子设计资讯
