
在过去二十年里,工业系统的通信方式发生了巨大变化。从这一变化中我们可以看出,许多公司从基于现场总线的系统转向基于以太网的通信系统。基于以太网的工业通信发展势头迅猛,预计会继续加速,分析机构MarketsandMarkets的最新研究发现,工业以太网的总体市场份额预计将从2020年的92亿美元增长到2026年的137亿美元,在研究期间的复合年增长率为7.3%。
工业以太网在相对较短的时间内占据了如此大的市场份额,这并不令人意外。尽管基于现场总线的系统已经过改进,但仍然存在一些不足。此类系统非常适合简单的控制功能,但随着越来越多的制造商致力于实现工业4.0战略,这些不足变得难以克服。最明显的缺点是速度,尤其是对于需要极其复杂且精确控制的应用,例如机器人。
基于以太网的实现显然是一种不错的选择。以太网可轻松提供足够的带宽来应对绝大多数工业用例,即使是要求最苛刻的工业4.0应用。这是一种业界熟知的标准,具备成本效益且在世界各地广泛应用。此标准非常灵活,适合许多不同的应用,尤其是能够以低成本的方式将旧现场总线分支轻松集成到以太网主干。在实现和维护方面,并不缺少使用过并了解以太网技术的工程师。工业4.0要求在工业操作和IT之间建立可靠的连接,因此具有基于相同标准的通信系统非常实用。但是,在IT系统中采用的以太网具有不确定性,而这是控制系统中最重要的要求之一。
为满足这一要求,许多制造商和组织着手开发一种基于以太网且适用于工业应用的标准。这些新标准中最常用的是以太网TSN、以太网/IP、PROFINET和EtherCAT。从最初开发之时起,其中的每个协议和其他较小型或专有系统都具有其自身适用的地理或技术场景。
所有协议都有各自的优缺点。通常,它们采用在IT中应用的以太网概念,并相应调整来提供实时操作。其中一种工业以太网EtherCAT(用于控制自动化技术的以太网)的实现方式略有不同,它保留了标准以太网物理层并在其基础上构建了全新的确定性协议。此协议使用主机控制器,它是惟一允许创建EtherCAT帧的器件。帧的长度始终相同,并且网络上的每个器件节点都有专用的帧可寻址区域。当帧在网络中传输时,每个节点选择控制数据并在其经过时在其分配的空间中丢弃回复信息,帧的延时不超过硬件传输延时,同时提供接近100 Mbps线路速度的最大有效数据速率。
在其他工业以太网实现中,执行帧检查、执行CRC检查和遍历协议栈可能需要数百微秒。EtherCAT的设计仅需125 µs即可完成整个过程。更快的速度带来了更强的系统响应能力,而这又有助于提高整个控制应用的效率和安全性。EtherCAT器件节点也比其他工业以太网实现简单得多,只需要在合适的单片机上运行的协议栈代码(SSC),这进一步降低了系统的复杂性和成本。
但是,EtherCAT的应用并不是最容易实现的。对于设计人员而言,最困难的障碍是满足周期时间的要求。许多制造商(尤其是使用电机的制造商)希望以每秒8,000次循环(即125 µs的周期时间)实现控制算法。尽管EtherCAT系统很容易达到这一数字,但实践证明十分困难,而且通常需要大量的软件编写和优化工作。此外,这种方法的成本也十分高昂,在电机控制器旁边放置现成的DIN导轨EtherCAT控制器可能要花费数百美元。但是,定制设计的实现只需不超过十倍的费用。
自2012年以来,Microchip一直致力于耕耘EtherCAT市场,于2015年推出了首款EtherCAT器件控制器(ESC)LAN9252。事实证明,Microchip进入该市场获得了成功,同时也收集到市场中存在的痛点的反馈。此外,Microchip还发现,用户希望通过一种更容易的方式来满足周期时间和一系列功能的要求,允许其在实现基础上增加价值,并且能更深入地了解EtherCAT的工作方式。
这些反馈促使Microchip开发了第二代ESC解决方案,并于2020年9月推出。LAN9253和LAN9254器件是3端口ESC,配有双集成以太网PHY,支持全双工100BASE-TX收发器和100 Mbps操作。
Microchip在全新ESC中进行的最重要改进是对设计进行了定制,允许设计人员在软件优化极少的情况下满足周期时间目标。此外,新器件还通过缩短设计时间和减少所需的BoM简化了EtherCAT节点的实现。常规EtherCAT实现使用ESC、单片机和EEPROM,EEPROM托管ESC的配置。Microchip开发了一种可高效仿真EEPROM的技术。ESC使用函数调用直接从主机单片机获取指令且不会影响性能,因此无需物理EEPROM。
新的IC还设计了减少定时所需晶体数量的功能。许多工业设计将多轴控制器用于机器人等应用。这些设计可能需要最多六个不同的控制器电路来操作一个多轴机械臂。以前,每个电路都需要对应的晶体来定时。而在新的IC中,采用了一种使用单晶体精确复制六个电路的时钟系统和抖动衰减器的方法,无需另外五个晶体,因此有助于进一步降低系统成本。
这两款器件还提供了其他功能,可简化EtherCAT系统的实现和操作。EtherCAT协议设计为不在物理层进行诊断,因此用户只有在开始出现CRC错误和其他问题时才会知道故障,例如电缆降级。Microchip的设计能够随时监控电缆的状况,允许用户在出现问题之前发现故障,这是工业4.0的一个关键原则。
LAN9253采用QFN封装,尽可能地复制了LAN9252封装的引脚排列,允许客户利用设计提供的改进,并进行最小程度的重新设计。LAN9254具有16个额外的I/O引脚,允许ESC作为简单的控制器工作,无需单片机。由于器件节点使用的帧区域和传输延时已知,因此ESC中的位可以映射到帧和32个I/O线路中的偏移,从而允许现场设备直接连接到EtherCAT网络。
许多客户要求我们包括控制器来提供一体化ESC解决方案。今年,Microchip推出了LAN9255,其中增加了Cortex-M4F单片机。MCU具有足够的速度来满足EtherCAT的要求,同时也可用作控制系统的应用处理器。处理器的浮点单元有助于处理更复杂的算法,例如电机控制所需的算法。此外,还添加了支持SNMP版本3代码的以太网套接字,允许设计人员在将操作技术连接到IT系统时获得更高的灵活性。
Microchip的LAN9253和LAN9254无需相关支持组件,同时简化了软件优化流程并增加了分析网络的能力,因此可以更容易地实现和维护EtherCAT节点,缩短消耗时间并降低成本。新的LAN9255 IC进一步推动了这一趋势,它无需外部主机控制器,并且为开发人员提供了采用单一封装的EtherCAT节点和现场控制解决方案。利用Microchip MPLAB® X Harmony框架,可以在一个易于使用的用户环境中编写和优化通信与控制软件,从而进一步缩短上市时间。
本文中探讨的所有器件现在都已批量生产,并由Microchip设计验证服务提供支持:https://www.microchip.com/en-us/products/high-speed-networking-and-video/ethernet/ethercat-technology-solutions
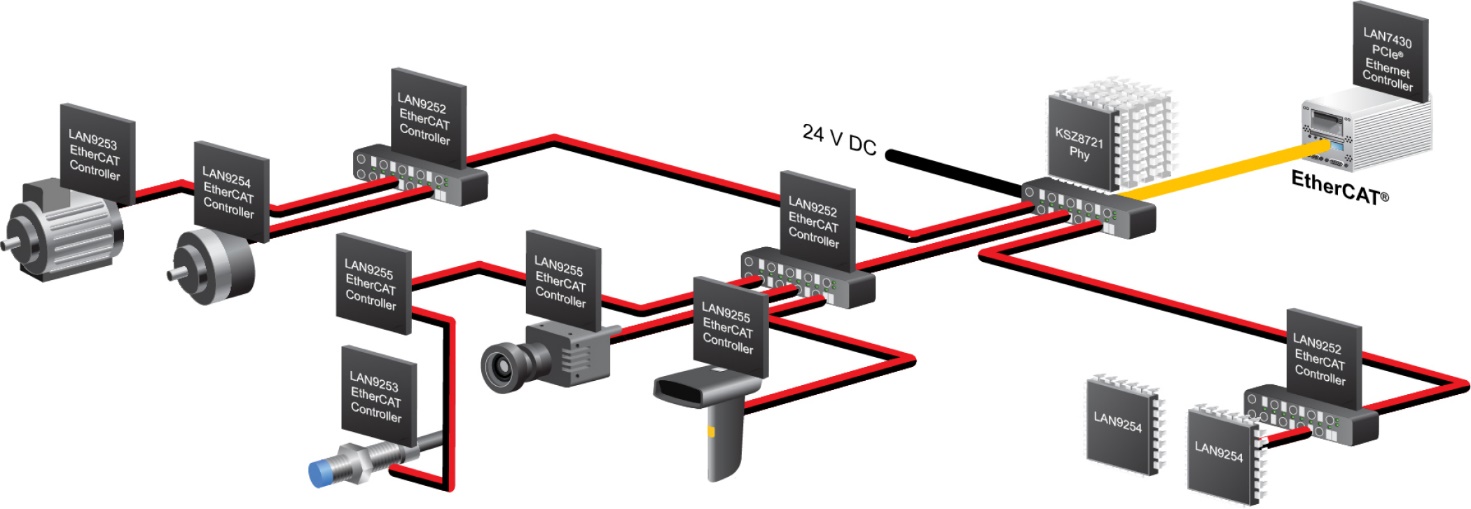
图1. 展示Microchip产品所发挥作用的典型EtherCAT®系统
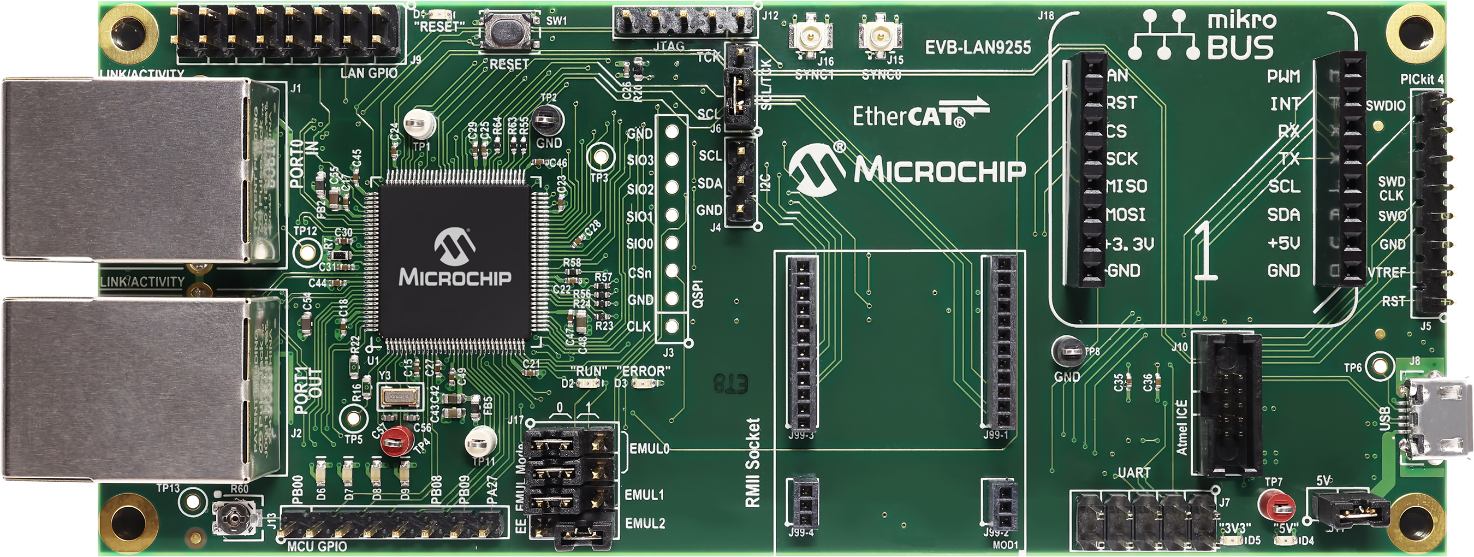
图2. LAN9255评估板(EVB-LAN9255)允许工程师使用集成的Cortex® M4F单片机与EtherCAT®器件控制器进行开发
 最前沿的电子设计资讯
最前沿的电子设计资讯
