
居里(Curie)兄弟在 19 世纪末演示了直接压电效应,表明对石英等天然晶体材料施加应力能够产生电荷(参见图 1a)。当然还有一个相反的效果:向具有压电特性的材料施加电场会导致物理变形(参见图 1b),从而导致几微米的位移。
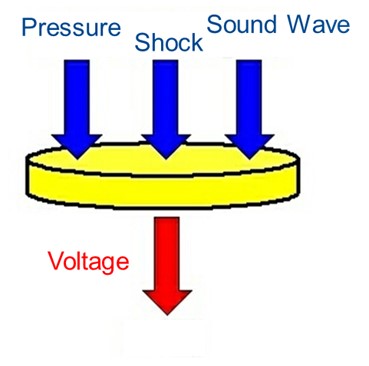
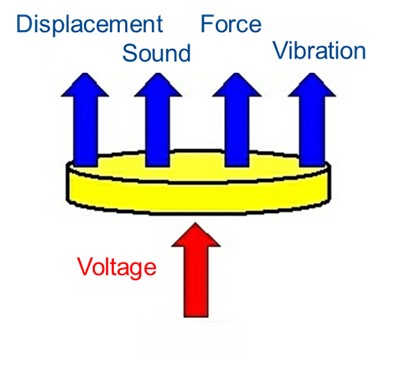
图 1a 和 1b:正压电效应和反向压电效应。
自居里夫妇的研究以来,已经开发出各种合成式压电材料或铁电陶瓷,这些通常具有比天然材料高得多的压电常数。经烧结之后,晶体结构内的偶极子为随机取向,在施加强电场后偶极子得到极化。即便去除强电场,仍有残存极化效应存在,从而使这些陶瓷材料具有压电特性。
在这些合成材料中,PZT 或锆钛酸铅 (Pb (Zr, Ti) O3) 具有高灵敏度和高工作温度,可用于一些实际应用。它的直接压电特性可用于压力、振动、加速度和冲击传感器,以及超声波接收器和诊断设备、声纳仪器、探鱼器、无损检测设备和麦克风等设备。
另一方面,也可以利用反向压电效应来控制晶体尺寸,能够创建诸如精密工业定位平台、阀门、用于变焦和自动对焦的相机镜头马达、超声波源和扬声器等致动器。
通过在纵向或横向施加电压以产生不同方向位移,可以构建各种类型的致动器以产生不同类型的运动。图 2 比较了纵向、横向和堆叠纵向元件,其中显示了位移方向,以及产生弯曲位移的双压电晶片横向元件。
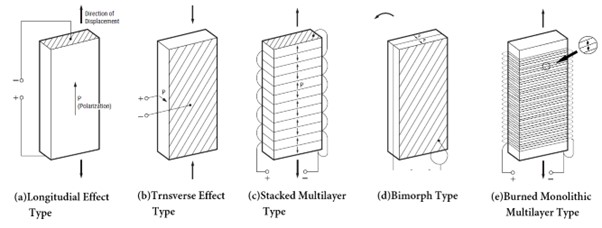
图 2:压电致动器的结构类型。
纵向效应型由于电极间距较长,需要较大的电压才能获得相应位移。横向效应型因为电极间距比纵向效应型短,所以可降低电压,但位移量较小,因为所用的是垂直于极化方向的位移。层叠型电极间距短,利用极化方向的位移,因此可以用低电压获得位移,但存在必须堆叠每个压电陶瓷的不便。此外,双压电晶片型可以在低电压下获得较大位移,但由于它利用弯曲方向的位移,不能获得大的生成力,并且在重复驱动的耐久性方面存在局限。
整体烧制的多层压电致动器通过缩小电极之间的空间来克服这些问题,从而在足够低的电压下实现大位移,以利于实际应用。
与可用于产生精确控制运动的小型马达或螺线管等电磁致动器相比,压电致动器具有许多优势。首先,它响应时间非常短。此外,压电致动器不会产生电磁噪声,可以简化系统设计,消除材料清单中的屏蔽和滤波组件,并可使 EMC 合规性测试更加容易。由于产生的热量较少,热管理也可以因此大大简化。压电致动器的紧凑性和重量轻也是其进一步的优势,能够以高分辨率进行精确控制。表1比较了使用电磁和压电致动器进行设计时应考虑的关键因素。
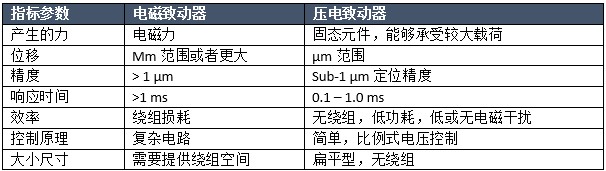
表 1:电磁和压电致动器的比较。
尽管多层压电致动器通常都具有出色的特性,但在进行设计时仍建议小心谨慎。重复驱动会导致元件断裂,因为正负内部电极之间的非活性绝缘区域与活性区域相对膨胀和收缩不同,从而引入机械应力。 “全电极”式致动器能够更好地承受重复致动,通过将电极扩展到每个板的全部宽度,并在电极之间引入玻璃绝缘体(参见图 3),消除了非活性区域,从而防止了由于膨胀不同引起的应力。
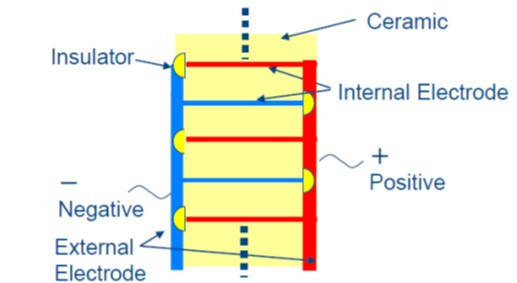
图 3:带有玻璃绝缘体的全电极堆叠式多层结构。
此外,高湿度等环境挑战会缩短致动器的使用寿命。密封性能好的致动器可以在暴露于严苛应用环境下,并能够提供高可靠性,其中可能包含包装在完全密封金属外壳中的高位移压电材料(参见图 4)。外壳有一个预加载的波纹管结构,可以伴随元件膨胀和收缩,并且具有一个金属法兰来简化安装。
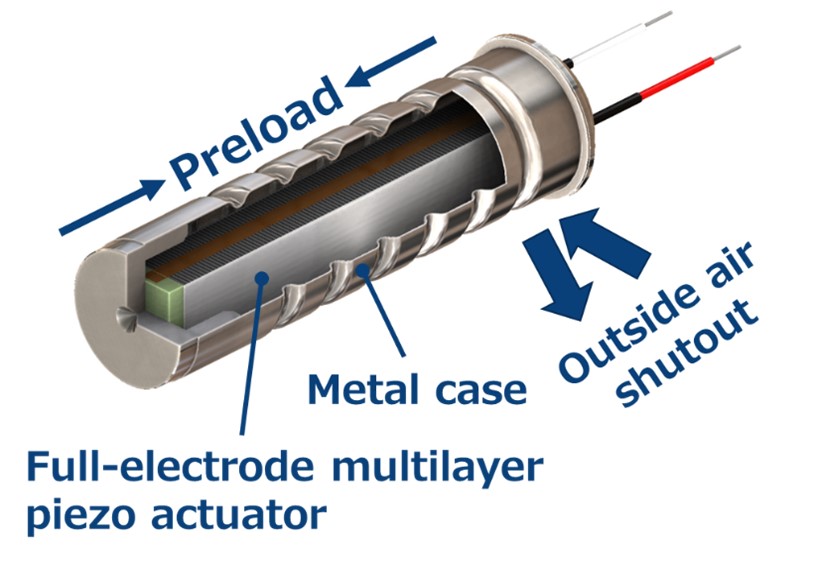
图 4:密封多层压电致动器。
压电元件的尺寸变化可用于产生线性位移,以实现操作泵、阀门和精密定位控制机构等各种应用效果。图 5 展示了安装在三个轴上的压电致动器如何控制精密检测仪器中 x-y 载物台位置以及镜头聚焦的工作原理。
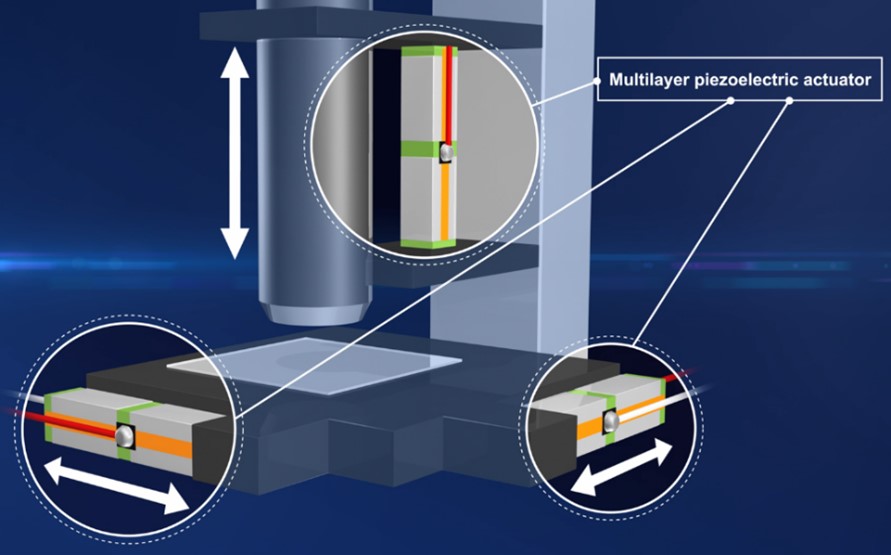
图 5:自动检测设备中的精确定位。
图 6 显示了压电致动器如何控制粘合剂分配,并确保适用于智能手机等产品高速组装的精确计量。
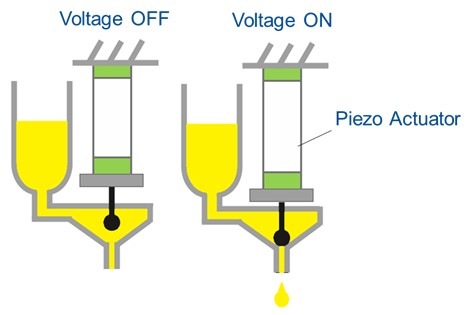
图 6:使用压电致动器的精密高速粘合剂分配。
树脂涂层环形致动器适用于定位应用,例如可微调高精度法布里-珀罗(Fabry-Perot)谐振器中的激光波长和相位,用于干涉测量等应用(图 7)。控制压电致动器的膨胀和收缩可以改变激光的波长。
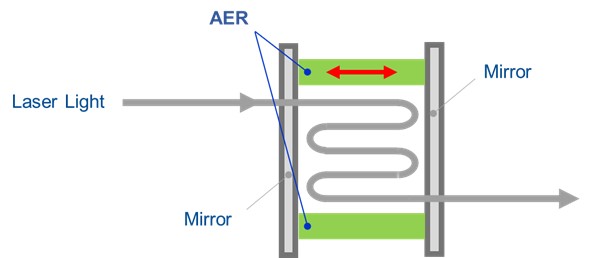
图 7:法布里-珀罗干涉仪中的环形压电致动器。
图 8 显示了如何在质量流量控制器中利用致动器长度的变化。对于半导体制造中使用的成膜和蚀刻设备,这些致动器在此类质量流量控制器中可提供超精确的气体流量控制。
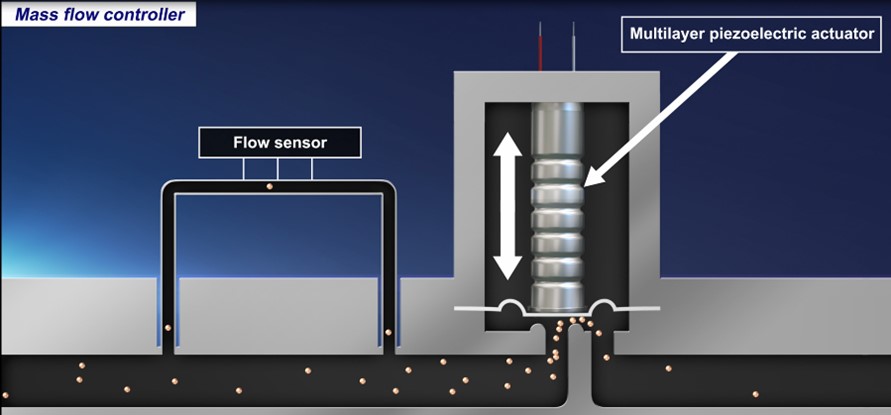
图 8:质量流量控制器中的压电致动器。
由于具有最少量的活动部件,并采用了多层全电极结构等特性,压电致动器可提供比机电致动器等其它技术更优的固有可靠性优势。为了最大限度地提高其可靠性和性能,用户可以考虑一些简单的设计指南。在设计固定时,要防止致动器弯曲、扭曲或受到拉力。根据经验,对于能够产生 800N 力(抗压性)的致动器,任何扭转力都应小于 3 × 10-1 N·m,拉伸力应限制在 50N 或以下。致动器的安装应使产生位移的中心轴与负载的中心轴对齐。
关于致动器的驱动,位移量与所施加的电压大致成比例,需要一个控制器来生成所需的电压模式,并通过一个能够产生所需驱动电压的放大器来驱动致动器。在高精度定位应用中,闭环反馈可以增强对位移的控制。不应施加反向电压。
设计驱动电路时应考虑滞后(hysteresis)、振铃(ringing)、爬电(creep)和其他类似现象。为防止可能使致动器损坏的强烈振铃,施加电压的上升或下降应限制在致动器元件谐振频率的 1/3 以下。
压电致动器的致动类似于将电荷注入到相对较大的电容器中。为了实现致动器的高速响应,需要较大电流。对于脉冲驱动,驱动器设计应考虑自发热、充电/放电电流和电源阻抗等因素。
压电致动器能够实现简单而精确的运动控制,可为工业、医疗和消费等应用带来低功耗、低噪音和紧凑尺寸等优势。 多层全电极堆叠致动器相对于施加的电压能够产生较大位移,并且能够很好地免受重复致动应力影响。
作者:YAGEO 旗下公司KEMET Electronics Corporation 磁性、传感器和致动器分销推广产品管理高级经理Patrik Kalbermatten
 最前沿的电子设计资讯
最前沿的电子设计资讯
