
据EDN电子技术设计报道,日前,国内网约车巨头滴滴出行再次对外公布业务进展——自动驾驶,不仅展示了首款未来服务概念车DiDi Neuron,公布了在技术、硬件、量产以及新业务探索方面的进展,同时还发布了首个自动驾驶自动运维中心。
DiDi Neuron是滴滴的首款未来服务概念车,在空间上,Neuron取消了驾驶位,最大限度解放了乘坐空间。在车辆总长度不变的前提下,相较普通网约车内部空间提升50%,腿部空间提升86%,乘客甚至可以在车内“一键躺平”。

在功能方面,Neuron独创了车内机械臂,是无人驾驶时代的“管家”,可以为用户提供提行李、递水、叫醒等服务。
车内搭载大屏交互系统,设计了会议、游戏、影音、街景介绍、氛围选择等模式,充分考虑乘客的需求和体验。
车外创新性用智能交互五联屏代替了传统车灯,能更为直观、便捷的地显示车辆转弯、到达、充电等状态。
此外,顶翼门+侧滑门的设计,在开门时,不会撞到其他人,顶翼门的设计非常有仪式感,让乘客可以不必低头直接上车。
在车辆硬件方面,全车设置了21个相机、14个雷达,模块化、易插拔的结构设计也便于车辆的维修保养,提升了车辆运维效率。动力系统方面,通过将轮毂电机和无人网约车结合,四个轮胎能够灵活转向,能实现更小半径转弯、斜向行驶等功能,应对网约车常见的狭窄道路的掉头、错车场景。
激光雷达是自动驾驶的眼睛,而计算平台则是自动驾驶的大脑,对于L4等级的自动驾驶而言,自然要求更高精度的激光雷达及更大算力及容量的计算平台。
滴滴自动驾驶和北醒公司联合研发的滴滴北曜Beta,是国内首个2K图像级高精度激光雷达拥有每秒300万高点频、超512线、横向120°及纵向25.6°的超大视场角等性能特点。
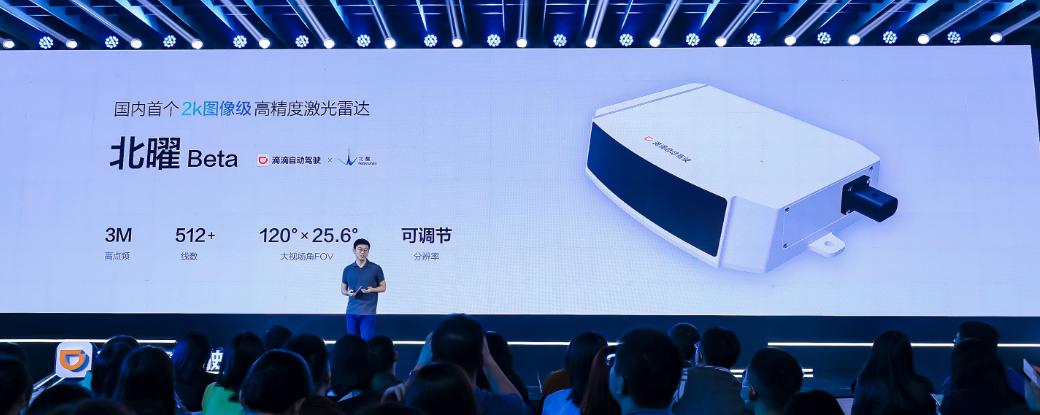
此外,北曜Beta增加了可调节分辨率功能,支持常规模式、视场角聚焦高清、局部高清、全局高清等四种模式。
视场角聚焦高清是滴滴独创的模式,核心意思就是,不需要看到的地方就不用看清,牺牲下面的分辨率来换取上面的分辨率,调整能力把更远的地方看清楚。
局部高清功能则可以调节我们视场(角),相当于做了一个高分辨率窗口,其他地方做了妥协,这样就可以动态调整我们想要的高清窗口的位置。
全局高清可以瞬间把全局点亮,不分区域,全部分辨率变高。此功能涉及到超频的能力,时间不会维持很长。
总之,场景不同,需求不同。不仅200m外感知轮胎等低反射率物体清晰的轮廓,还可以根据场景需求自适应地调节局部区域或全局的分辨率,提升激光雷达在不同环境下的感知效果。
Orca虎鲸
Orca虎鲸则是滴滴自动驾驶研发的行业首个量产化的三域融合计算平台,打造车载超级中央计算单元(SCCU),将智能驾驶域、智能座舱域和网联域三域融集成至一体。

相比于上一代硬件,虎鲸计算平台成本下降88%,整车空间体积减少74%,核心元器件数量减少了61%,线束数量减小了33%。
这也意味着自动驾驶车的后备箱能再多容纳一个20寸行李箱,与此同时,整车装配时的人效比提升7倍。
总结而言,就是不仅降低了成本、减小了体积,其性能还得到了提升。
据称,滴滴自动驾驶首款车型将于2025年接入滴滴共享出行网络,实现全天候、规模化的混合派单。
目前,滴滴自动驾驶正在结合新能源整车企业能力,共同定义和量产无人驾驶新能源网约车,已在Robotaxi产品定义、车型平台选择及座舱与智驾系统开发等方面合作。
 最前沿的电子设计资讯
最前沿的电子设计资讯
