
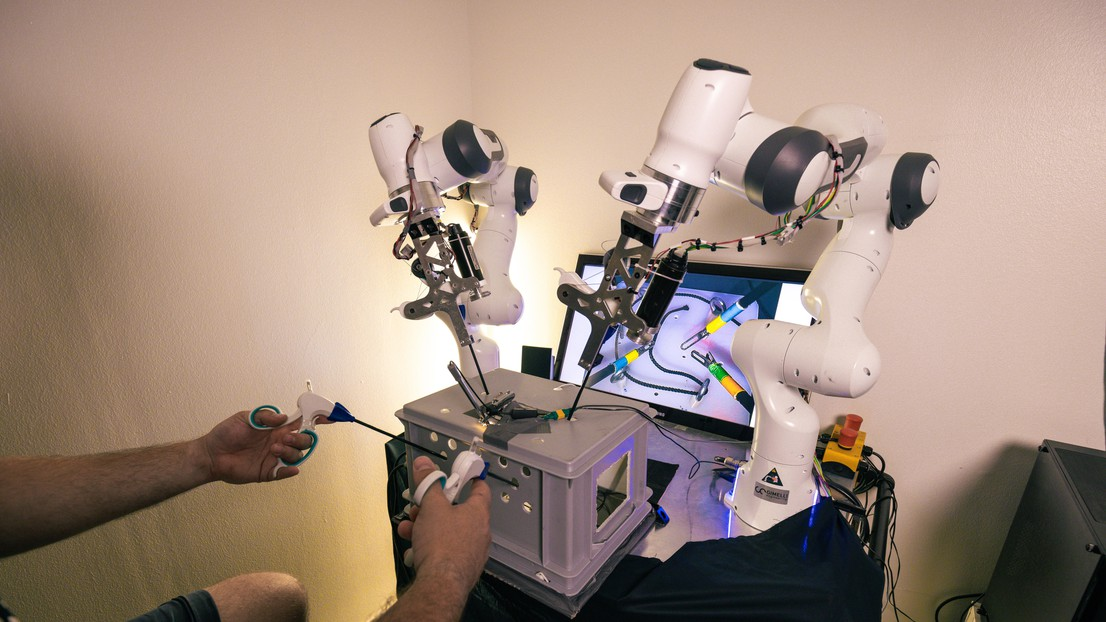
近日,洛桑联邦理工学院的科学家团队发布了一款四臂腹腔镜机器人,研究成果证明该机器人在减少医生工作量、提高精度和安全性方面具有可行性,相关专家已经成功接受了该机器人系统的培训,临床试验正在日内瓦进行。此项研究结果以“Enabling four-arm laparoscopic surgery by controlling two robotic assistants via haptic foot interfaces”为题发表在《国际机器人研究杂志》上。

一般的手术机器人,如用于微创手术的达芬奇机器人平台,是由医生手脚并用对手术机器人进行操控来完成手术,而该手术机器人则是在医生用双手实施手术的同时,使用双脚来操作两条机械臂协助完成手术。目前一些复杂的手术需要两到三人才能完成,但是借助这一手术机器人,可能今后一位医生就能完成相同的手术。
该系统的一项关键创新就在于医生和机器人之间的共享控制。脚踏板中的执行器会向用户提供触觉反馈,引导脚朝向目标,就像遵循着看不见的力场一样,并且还会限制力和运动,防止错误的脚部动作危及患者。
同时,因为要控制四只手臂,而且有两只手臂还是用脚控制,这与常规的操作相去甚远,可能会让医生使用起来非常累。所以为了降低控制的复杂性,该机器人可以主动预测医生的意图,并使用摄像头对腹腔镜器械进行自适应视觉跟踪来协调其与医生的动作,例如当需要在缝合线上打结时,机器人手臂会将内窥镜调整到正确的位置,并且控制夹具移开给医生留出更好的视野。
研究人员所开发的控制框架确保了医生和机器人可以在并发的工作空间内协同工作,同时满足了腹腔镜手术的精度和安全性要求。这种使用脚部控制的手术机器人,极大的减轻了医生的精神和身体负担,对于手术的结果可能也会有所改善。
 最前沿的电子设计资讯
最前沿的电子设计资讯
