
近些年来飞行机器人发展的越来越迅猛,人们越来越多的依赖于机器人来完成那些具有挑战性的危险任务,但是受限于体型与结构,采用无人机旋翼结构的飞行机器人载重有限,对于一些需要高载重量的场景就表现的无能无力了。而来自日本东京大学JSK机器人实验室的研究团队发明了一种可以在空中对接和分离的机器人,通过这种组合能力让机器人可以完成以往单个机器人无法完成的任务。

这种机器人全名叫“Tilted-Rotor-Equipped Aerial Robot With Autonomous In-Flight Assembly and Disassembly Ability”(具有自主飞行组装和拆卸能力的倾斜旋翼空中机器人)简称为TRADY,其主要是为了让飞行机器人可以在复杂环境中通行的同时具有完成高负载任务的能力。例如在发电厂中线路复杂建筑密集,机器人就要足够小防止碰撞,而过小的机器人可以完成的任务有限,这时候通过组合增加其负载能力,就可以完成更多的任务。
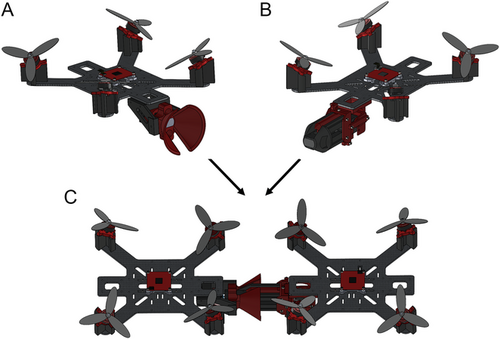
为了达到这种效果,飞行机器人的组合装置结构需要有足够的刚性,且要求无论何种飞行状况都能实现鲁棒的组装,为此该团队给TARDY开发了一套对接系统,其灵感来自喷气式战斗机中的空中加油机构,该机构的一侧有一个漏斗形单元,这样即使两个单元排列的出现错误也可以得到补偿。
组装过程
同时因为是旋翼飞行机器人,当两个机器人相互靠近对接时,会发生空气湍流,可能会将它们撞离对接位置,还可能增加两个组合单元相互碰撞的风险,也许会造成灾难性的后果。为了避免这种情况,研究团队制定了“hit and away”(且战且退)的策略。当TRADY单元相互接近时,如果其中一个检测到碰撞风险,它将立即回复到其安全的原始位置。在这个安全位置,TRADY系统可以尝试再次结合,最终在能确保安全对接时组合在一起。
该团队表示,TRADY单元的组合为空中机器人带来了明显的好处,组合在一起的TRADY表现出性能的大幅度提升,远超于单个单元。虽然目前该项研究只能实现两个机器人之间的组装,但是在未来,通过实现多模块的无缝组装,也许能够构建更加复杂的结构和空中框架。
 最前沿的电子设计资讯
最前沿的电子设计资讯
