
当我们谈及飞行时间(ToF)技术,最需要考虑的是多年来早已发生巨大变化的嵌入式视觉技术。从20世纪70年代首次形成理论直到今天,该技术飞跃式的发展为自主移动机器人(AMR) 的先进成像技术开创了一个新纪元。AMR最常见的用途是工业仓库,ToF技术在其中发挥着关键作用,它帮助机器人以最佳准确度感知周围环境。
ToF计算一个物体、粒子或波从A点移动到B点所需的时间。从根本上说,ToF技术和声纳是相似的。ToF通过测量信号从A点发射到从物体偏转后返回信号源探测器所需的时间来计算物体之间的距离。ToF技术使用的典型信号是声信号和光信号。使用光信号的传感器通过计算光从物体反射回信号源所需的时间来实现这一点。
ToF摄像系统使用照明光源(通常为激光二极管或LED)和传感器来测量距离。光源发出脉冲,传感器像素测量光返回所需的时间,并根据往返长度确定到物体(即A点)的距离。
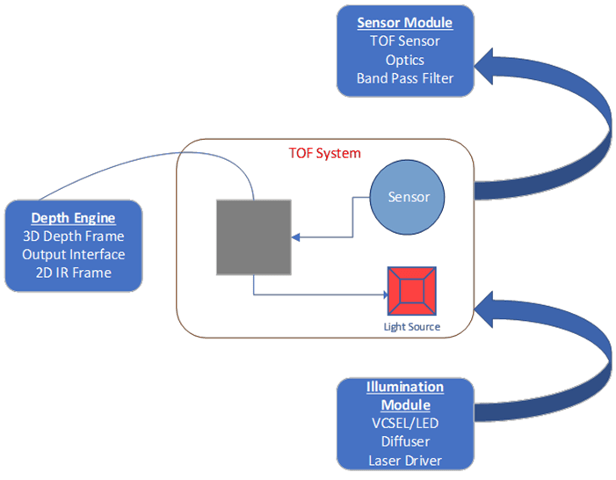
ToF摄像系统的关键组件(来源:e-Con Systems)
现代的立体视觉技术应用,通过使用红外图案投影仪照射周围环境或场景,从而比较来自2D传感器的图像的差异,以提供高水平的低光性能来确定物品的范围或距离。相比之下,ToF技术则更胜一筹,它使用传感器、照明单元和深度处理单元来计算移动机器人的纵深。
因此,它们可以开箱即用,无需进一步校准。在执行基于场景的任务时,ToF摄像机放置在移动机器人上,以高帧速率提取3D图像,并快速分割背景或前景。由于ToF摄像机还可使用主动照明组件,因此移动机器人可以在明亮的条件下或完全黑暗的条件下执行任务。
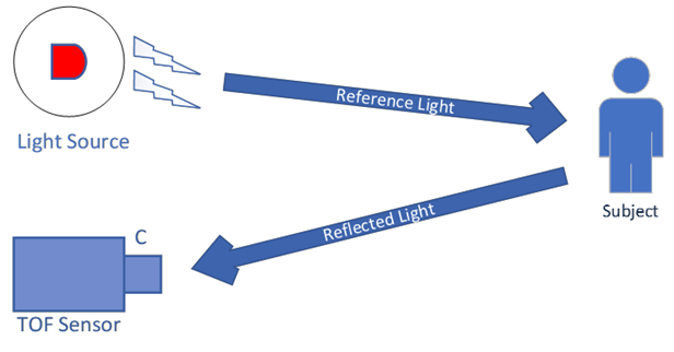
ToF摄像机如何测量纵深(来源:e-con Systems)
ToF摄像机在仓库作业中的作用是明确的。这些摄像机用于为AMR和自动导引车(AGV)配备纵深感知智能。它们可以帮助这些设备感知周围环境并捕获纵深成像数据,从而准确、方便和快速地执行关键业务功能。功能包括:
这些摄像机通过测量从物体反射到光源的光的传输时间来绘制未知环境的地图。它采用即时定位和地图构建(SLAM)算法,需要3D纵深感知才能实现精确制图。例如,使用3D纵深感知,这些摄像头可以轻松地在场地内创建预定路径,供机器人四处移动。
AMR更倾向于在指定的地图上从A点移动到B点,但借助SLAM算法,它们也可以在未知环境中这样做。如果成功地利用ToF技术,AMR可以快速处理信息并在决定路径之前以3D方式分析其环境。
AMR在仓库中行驶时很可能会遇到障碍物,因此优先考虑为其配备快速、精确地处理信息的能力。有了这些基于传感器的ToF摄像机,AMR就可以在遇到障碍物时重新确定其路径。
通常,ToF摄像机通过扫描环境并将实时信息与预先存在的数据进行匹配,帮助AMR识别已知地图上的物体。这需要GPS信号,但这对仓库等室内环境是个挑战,因此另一种解决方案是可以在本地操作的定位功能。使用ToF摄像机,它们可以通过计算与地图中参考点的距离来捕捉3D纵深数据。然后,AMR可以使用三角测量来精确定位其准确位置。这就实现了无缝定位,使导航变得简单而安全。
(原文刊登于EDN姊妹网站Electronic Products,参考链接:How does an AMR use time-of-flight technology?,由Ricardo Xie编译。)
 最前沿的电子设计资讯
最前沿的电子设计资讯
