
做饭、浇花、打扫房间、煮咖啡、给主人刮胡子、洗碗、逗猫、扔垃圾、洗衣服、换被套、收纳衣物等数十种家务技能,以上这些工作其实是一个“全能家政员机器人”完成的,不仅如此,还能为自己充电。

据EDN电子技术设计了解, Mobile ALOHA是由斯坦福华人团队Zipeng Fu、Tony Z.Zhao和Chelsea Finn共同研发的。在发布了机器人完成炒菜、洗碗等各种复杂任务后,引起了网友的关注和热议,1月5日周五,研发团队再次发布新视频,展示了Mobile ALOHA更多的技能。

据介绍,Mobile ALOHA并不是一个机器人,而是一个用于数据收集的低成本全身远程操作系统。可以通过模仿学习,执行各种复杂的任务,不仅可以自主操作,还可以支持全身远程操控。研发团队表示,他们使用 Mobile ALOHA 收集的数据执行监督行为克隆,并发现与现有静态 ALOHA 数据集的联合训练可以提高移动操作任务的性能。每项任务进行 50 次演示,协同训练可将成功率提高高达 90%,让 Mobile ALOHA 能够自主完成复杂的移动操作任务,例如炒、打开两门壁柜存放重物等烹饪锅具、呼叫并进入电梯以及使用厨房水龙头轻轻冲洗用过的锅。
它基于ALOHA(一种低成本开源硬件)双手遥控系统构建,为了实现远程操控这个功能,研究者将其安装在一个轮式底座上,给了机器人接近人类的移动速度,使其具备移动性和双手操纵能力。系统还包括了两个手腕摄像头和一个顶部摄像头,用于捕捉操作过程中的视觉信息。此外,系统还具备了机载电源和计算能力,使得它能够在没有外部电源的情况下连续工作多小时。

除了这些基础硬件之外,研究团队还设计了一个将操作者的身体与机器人底座相连的系统。操作者通过背带与底座相连,并通过拉动底座来控制机器人的移动。这种设计允许操作者在控制机器人的移动的同时,用双手操纵ALOHA的双臂。
通过这些接口,研究团队收集了大量的操作数据。这些数据包括机器人底座的线性和角速度,以及机器人双臂的关节位置。这些数据被用来训练模仿学习算法,以学习如何执行复杂的移动操作任务。之后,研究者使用了监督行为克隆(Supervised Behavior Cloning)的方法来训练机器人。他们首先将机器人的关节位置和底座的速度作为动作向量,然后将这些动作向量与机器人的观察(包括摄像头图像和关节位置)结合起来,形成一个16维的动作向量。这种方法使得Mobile ALOHA能够直接从之前的深度模仿学习算法中受益,几乎不需要改变实现。
为了提高模仿学习的性能,研究者采用了共同训练的方法。他们将Mobile ALOHA收集的数据与现有的静态ALOHA数据集结合起来进行训练。这种共同训练的方法在几乎所有的移动操作任务中都显示出了正向转移,即使在任务和形态上有所不同的情况下,也能实现等效或更好的性能和数据效率。
通过这些实现原理,Mobile ALOHA系统能够在有限的演示数据下,通过模仿学习掌握复杂的移动操作任务。这种低成本的解决方案为研究者提供了一个实用的平台,用于研究和开发能够在家庭环境中执行实用任务的机器人。
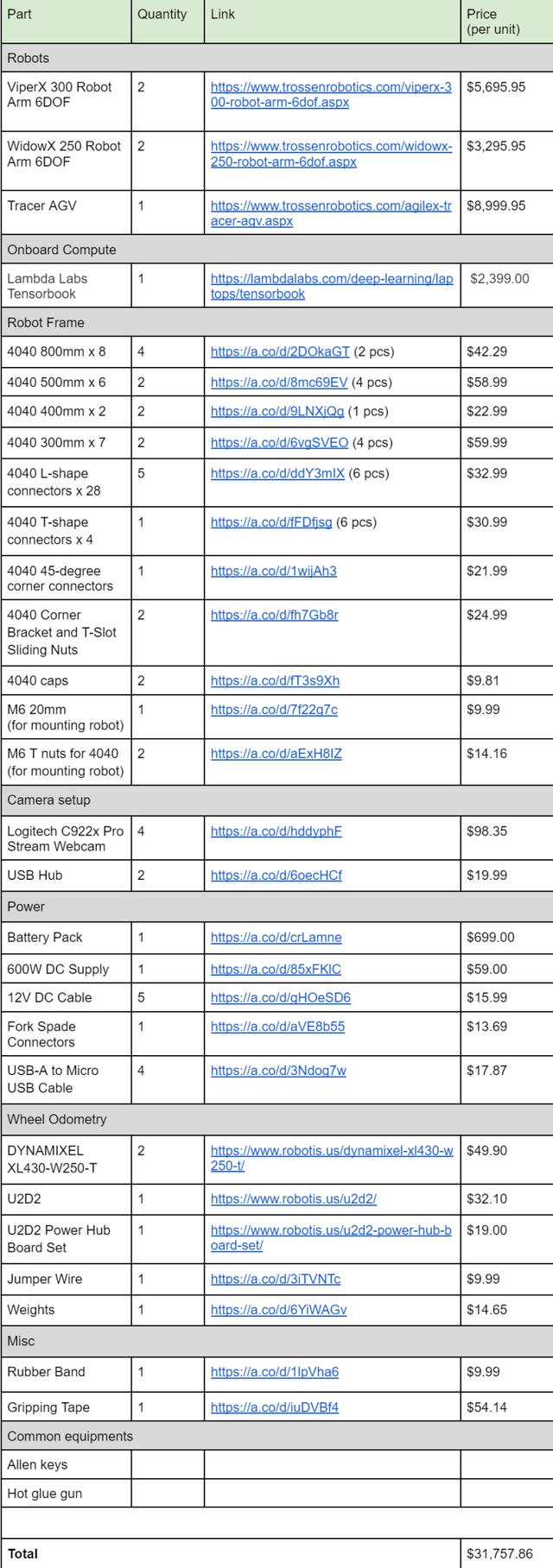
该团队还公布了Mobile ALOHA系统的开发成本,整套系统总价仅需32000美元。其中包括机器人硬件、记载电源和计算设备、摄像头、传感器、组装和维护费用以及开源的软件部分。
不得不说,Mobile ALOHA为机器人学习和移动操作研究提供了一个经济高效的解决方案。
尽管Mobile ALOHA在硬件和软件方面都取得了显著进展,但该团队也表示,Mobile ALOHA仍存在一些限制,例如目前Mobile ALOHA的动作依然需要人来介入操控。团队负责人之一对此表示,人类操控是暂时的,他们已经在研究如何弥合人为控制和机器人自控之间的差距。
此外,系统占用面积较大,固定高度的双臂难以触及较低的橱柜、烤箱和洗碗机等、给手臂更多的自由度、让机器人自主探索获取新知识等。团队负责人表示,未来工作将致力于解决这些硬件限制,并探索如何从高度次优的、异构的数据集中进行模仿学习。
Mobile ALOHA 项目目前已经在 Github上开源,团队也放出了相应的论文和介绍。不过研究团队也表示,这项技术还不够成熟,将会在不久之后在 Arxiv 平台发布更详细的论文,GenAI 也将会继续关注技术细节,有新消息会第一时间解读。
演示视频:
Mobile ALOHA - A Smart Mobile Manipulation Robot - Compilation of Autonomous Skills;
Mobile ALOHA: Your Housekeeping Robot
https://mobile-aloha.github.io
文档:
https://docs.google.com/document/d/1_3yhWjodSNNYlpxkRCPIlvIAaQ76Nqk2wsqhnEVM6Dc
 最前沿的电子设计资讯
最前沿的电子设计资讯
