
对于背后的意图并用于康复治疗,它们需要可穿戴的电生理传感器来提供精确的肌电图测量。然而,现有的传感器通常会随着时间的推移显示出信号质量恶化的情况,并且受到用户皮肤状况的极大影响。此外,传感器较高的机械硬度会产生噪音,因为接触表面无法跟上皮肤的变形。这些缺点限制了可穿戴机器人的可靠、长期控制。
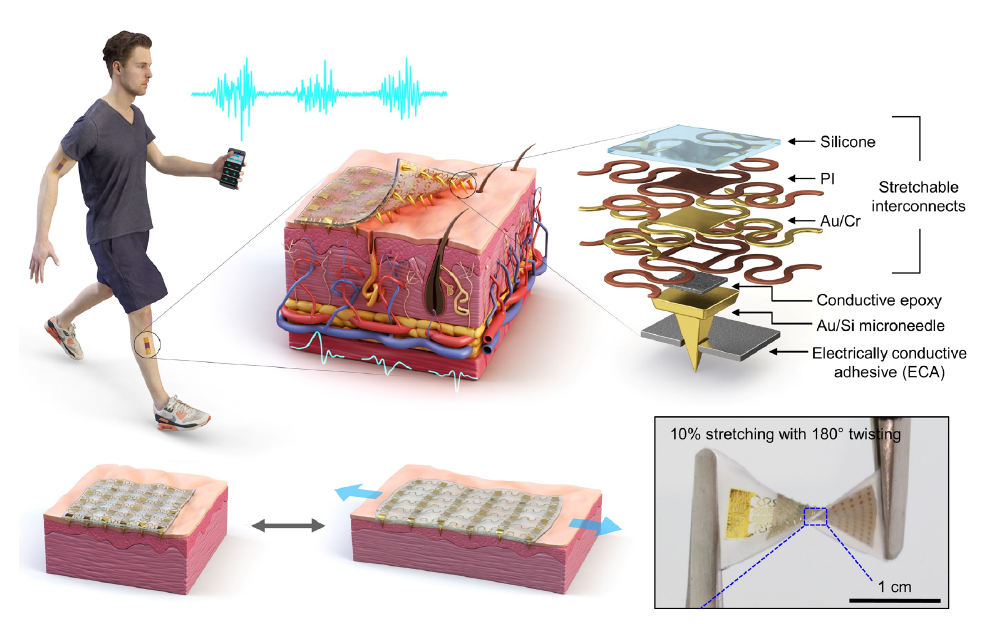
图 1. 可拉伸微针粘合贴片 (SNAP) 的设计和工作原理。 (A) SNAP 整体系统配置和应用示意图。 (B) SNAP 的分解示意图,由可拉伸蛇形互连、镀金硅微针和由银片-硅复合材料制成的 ECA 组成。 (C) 光学图像显示 SNAP 的高机械顺应性。
然而,最近开发的技术预计将允许长期和高质量的肌电图测量,因为它使用与微针阵列集成的可拉伸和粘合导电基底,可以轻松穿透角质层而不会引起不适。
由韩国科学技术院电气工程学院(EE)的 Jae-Woong Jung 教授和韩国科学技术院机械工程系(ME)的 Jung Kim 教授领导的联合研究小组成功开发了一种可拉伸和粘合的微针传感器,可以感应生理信号处于高水平,而不受用户皮肤状态的影响。
这项研究的结果由共同第一作者 Heesoo Kim 和 Juhyun Lee 撰写,他们都是博士。韩国科学技术院电子工程学院的候选人在《科学进展》上发表了题为“Skin preparation–free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control”的论文。

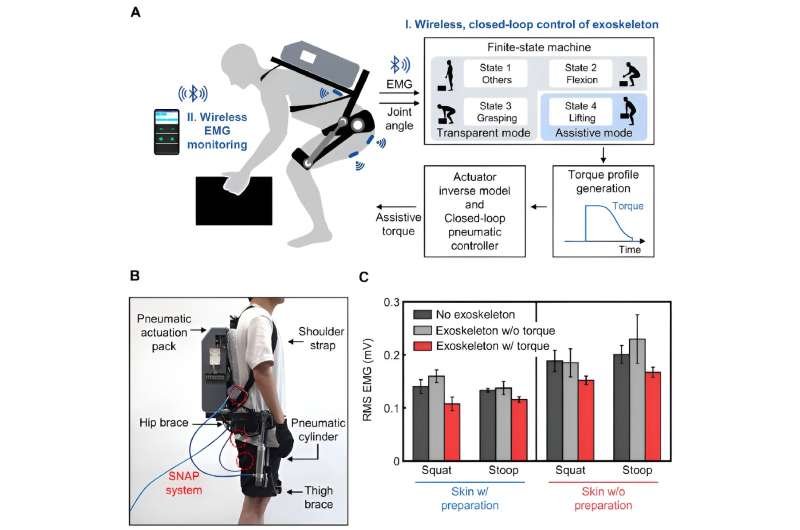 演示无线可拉伸微针粘合贴片 (SNAP) 系统作为外骨骼机器人闭环控制的人机界面 (HMI)。(A) 描述外骨骼机器人的系统架构和控制策略的插图。(B) 气动背部支撑外骨骼系统的硬件配置。(C) 经预处理的皮肤和未经预处理的皮肤在有或没有机器人辅助的情况下肌电图 (EMG) 均方根 (RMS) 的比较。图片来源:韩国科学技术院 (KAIST)
演示无线可拉伸微针粘合贴片 (SNAP) 系统作为外骨骼机器人闭环控制的人机界面 (HMI)。(A) 描述外骨骼机器人的系统架构和控制策略的插图。(B) 气动背部支撑外骨骼系统的硬件配置。(C) 经预处理的皮肤和未经预处理的皮肤在有或没有机器人辅助的情况下肌电图 (EMG) 均方根 (RMS) 的比较。图片来源:韩国科学技术院 (KAIST)
研究小组通过将微针集成到柔软的硅聚合物基板中,创建了一种可拉伸且具有粘性的微针传感器。坚硬的微针穿透具有高电阻的角质层。
该传感器可有效降低与皮肤的接触电阻,不受污染情况下获得高质量的电生理信号。同时,柔软且具有粘性的导电基材可以适应皮肤表面并随着佩戴者的运动而伸展,提供舒适的贴合感并最大限度地减少运动引起的噪音。
为了验证新贴片的可用性,研究团队使用可穿戴机器人进行了运动辅助实验。他们将微针贴片贴在用户的腿上,它可以感知肌肉产生的电信号。然后,传感器将检测到的意图发送给可穿戴机器人,使机器人能够帮助穿戴者更轻松地举起重物。
领导这项研究的 Jae-Woong Jung 教授表示:“所开发的可拉伸和粘合微针传感器可以稳定地检测肌电信号,而不受用户皮肤状态的影响。通过这一点,我们将能够以更高的速度控制可穿戴机器人。精度和稳定性,这将有助于使用机器人的患者的康复。”
参考链接:KAIST Research Team Develops Sweat-Resistant Wearable Robot Sensor;Demi Xia编译
 最前沿的电子设计资讯
最前沿的电子设计资讯
