
将模拟电路与数字逻辑集成在一起通常需要增加一两个额外的电源轨。精密运算放大器具有出色的PSRR(通常>>100dB),因此不怎么会受到电源轨变化的影响。这就简化了电源电路,减轻了设计任务,使其变得既简单又便宜。
这是一种流行的飞跨电容电荷泵电压转换器的变体,它利用运算放大器的容差来实现不太完美的电源调节。它首先将5V电压加倍,然后再反相,以生成标称对称的正负10V电压轨,每个电压轨都可以轻松提供数毫安的电流。完整的转换器由两个便宜的通用20V金属栅极CMOS三路SPDT CD4053B以及八个无源元件组成。图1显示了该电路。
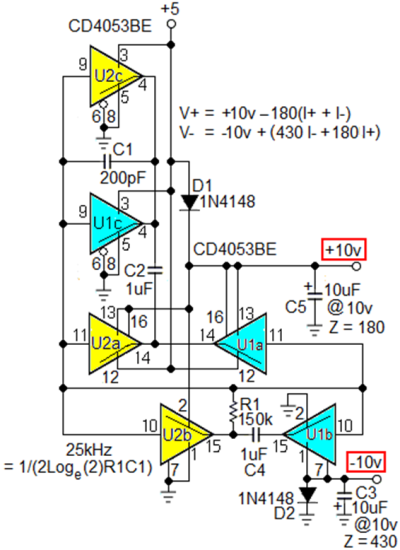
图1 一个25kHz的多谐振荡器(U2b)为飞跨电容开关进行时钟控制,首先将5V电压加倍至+10V(并联U1a、c和U2a、c),然后将其反相至-10V(U1b和U2b)。
并联开关U1c和U2c在Fpump=25kHz下运行,使“飞跨”电容器C2的上端在接地和+5V之间交替,而U1a和U2a则同步使其下端在+5V和+10V之间交替,从而产生倍压电容电荷泵。U1,2引脚13上产生的10V电源轨与U1,2引脚16的连接,就实现了上述第一个“自举”,即开关为自己提供10V电压。D1在上电时得到最初提供的~+5V直到电荷泵接管开始工作,此时D1被反向偏置并断开连接。
将U1,2a和U1,2c电荷泵开关加倍可将+10V输出的有效阻抗减半至~180Ω。这一点非常重要,因为+10V输出不仅为外部负载供电,还要为内部U1,2b电压转换器供电(稍后将详细介绍)。另外,这些导通电阻相对较高的金属栅极CMOS开关需要尽可能多的帮助。因此,+10V输出相当不灵活,根据以下表达式,该输出随着负载电流180mV/mA下降:
V+=10V–180(I++I-)
其中:
I+=+10V输出负载电流
I–=-10V输出负载电流
25kHz泵时钟由“合并的”振荡器提供,该振荡器由正反馈驱动的U2b组成。从U2c到C1以及通过R1的负反馈,生成:
Fpump=(2loge(2)R1C1)-1
泵频率会随着组件容差和10V输出的负载而有所不同,但由于时钟频率并不重要,因此对泵性能的所有影响都微乎其微。
由此产生的振荡器波形如图2所示。
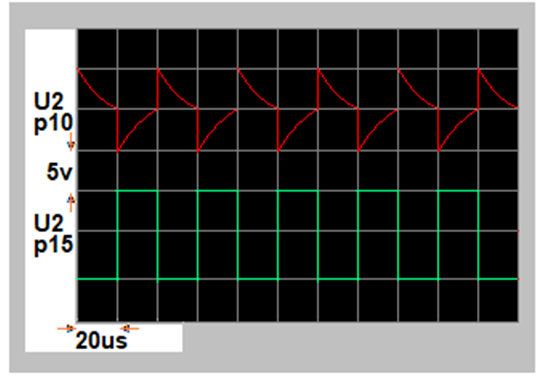
图2 25kHz多谐振荡器10Vpp波形。
+10V的反相产生-10V是通过U1,2b在左侧+10V和接地以及右侧接地和-10V之间切换C4来处理的。与引脚7的连接提供了第二个“自举”。D2将引脚7钳位到足够接近接地的位置,以便开关在上电时开始工作,直到电荷泵接管为止。
其结果是负轨根据以下表达式对负载做出反应:
V-=-10V+(430*I-+180*I+)
其中:
I+=+10V输出负载电流
I–=-10V输出负载电流
图3以图形方式总结了两个输出电压对负载的关系。
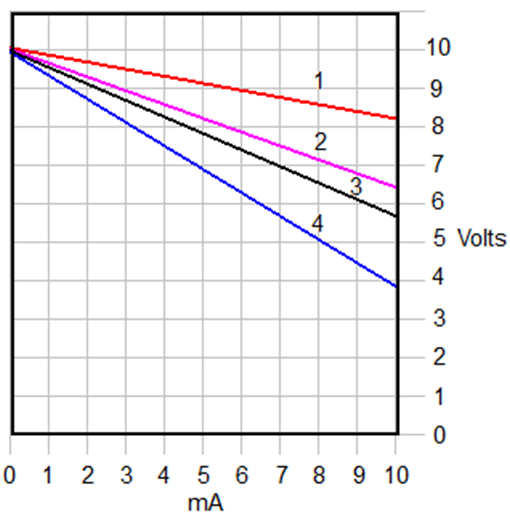
图3 四种负载情况下的输出电压:
(1)+10V输出,+10V负载为0至10mA,-10V空载;
(2)+10V输出,+10V和-10V均负载0至10mA;
(3)-10V输出,-10V负载为0至10mA,+10V空载;
(4)-10V输出,+10V和-10V负载均为0至10mA。
(原文刊登于EDN美国版,参考链接:Double and invert 5 V to generate ±10 V using two generic chips and two bootstraps,由Ricardo Xie编译)
 最前沿的电子设计资讯
最前沿的电子设计资讯
