
弹簧驱动的跳跃机器人使用电机将弹性势能储存在弹簧中,然后释放该能量来推动系统,其最初是为行星探索而开发的,后来又拓展到灾难救援、危险或难以进入的空间监视等应用。此前跳跃高度最高的机器人可以跳到33米高,相当于其自身尺寸的110倍。
而在最近,英国曼彻斯特大学的研究团队找到了一种方法,可以让机器人跳跃超过120米,也就是40层楼左右。
弹簧驱动系统的起飞分为三类:
很明显,如果想要使机器人发挥系统全部的性能,过早和延迟起飞都不可取,因为弹簧中残余的弹性能会降低弹性动能转换效率和整体机械动能转换效率。而研究人员发现,传统的跳跃机器人经常在还未完全释放储存的弹簧能量的时候就起飞,导致跳跃效率低下,并且这些机器人不是直线向上移动的,会因为左右移动或旋转而浪费弹簧的能量。
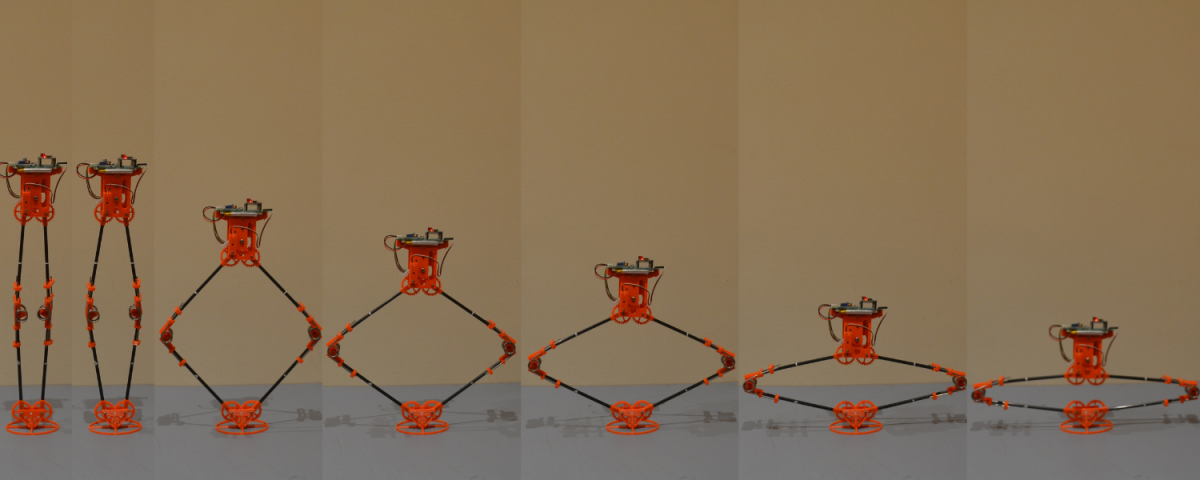
为此,研究人员进行了建模分析,对机器人的结构进行了重新设计,将机器人的组件质量重新分配到顶部,并将结构向下逐渐变细,同时,使用更轻的腿部、棱柱连杆和使用仅可拉伸的弹簧来提高跳跃机器人的能源效率。不过,即使是跳跃最高的弹簧连杆也会因惯性效应而损失50%的储存能量,根据研究人员的分析,即使忽略阻尼和摩擦效应,也不存在具有100%机械运动效率的理想跳跃系统。
实验模型
据悉,下一步研究团队的目标是控制跳跃的方向,并找出如何利用着陆时的动能来提高机器人在一次充电中可以进行的跳跃次数,同时他们还将探索更紧凑的太空任务设计,使机器人更容易在月球上运输和部署。
 最前沿的电子设计资讯
最前沿的电子设计资讯
