
不久前,我发表了一个设计实例“仅需一个电位器,就能将运算放大器增益从-30dB调整到+60dB”。
图1显示了该电路。
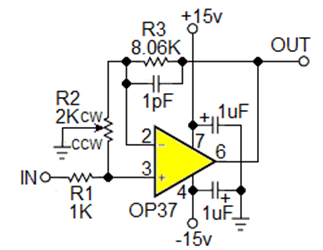 Gain = (R2ccw/(R1 + R2ccw))(R3/R2cw + 1) Gain = (R2ccw/(R1 + R2ccw))(R3/R2cw + 1) |
图1:接地的电位器使R2同时用作输入衰减器和输出增益调节器。
最近我开始琢磨数字电位器(Dpot)是否可以代替图1中的机械R2。图2显示了一种看似可能的Dpot拓扑。
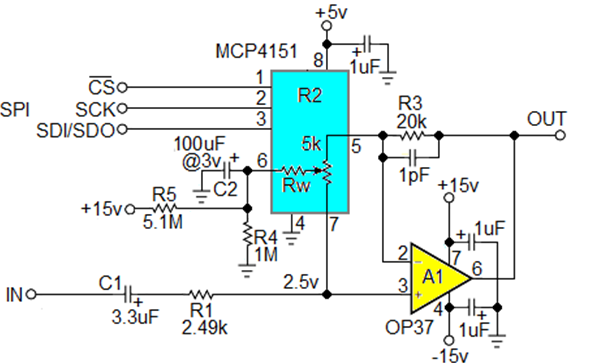 Gain = (R2ds/(R1 + R2ds + Rw))(R3/(R2(1 – ds) + Rw) + 1) Gain = (R2ds/(R1 + R2ds + Rw))(R3/(R2(1 – ds) + Rw) + 1) |
图2:R2的功能与图1相同,但R4 R5 C2提供直流偏置,以适应双极性信号。那么Rw滑动电阻效应如何?
仔细检查后,发现效果并不理想。这是因为滑动电阻干扰了R2两半的隔离,而最初的电路正是通过这种隔离实现工作的。图3显示了我最终采取的解决方案。
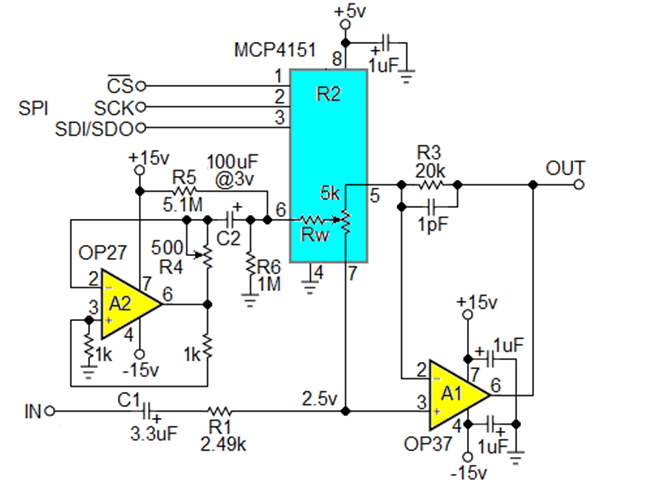
图3:将围绕A2的正反馈回路和负反馈回路结合起来,产生有源负阻=-R4。
A2及其周围的网络是这一设计的基础。它们产生有源负阻效应,从Rw中减去,如果调整为R4=Rw,理论上(工程师最不喜欢的词)可以完全抵消它。
一个快速消除Rw的方法是将Dpot设置写为零,提供~1v rms输入,然后修整R4以使输出为零。
以下是一些负阻计算。注意Vp#=A2引脚#处的电压信号。
Gain = (R2ds/(R1 + R2ds))(R3/(R2(1 – ds)) + 1)
图4中的红色曲线将图2中的行为与(未补偿)Rw=150Ω(对于图示的Microchip Dpot来说是合理的)进行比较,而黑色曲线显示了当R4=Rw=150Ω时发生的情况。将其与使用机械电位器的原始(图1)电路的性能进行比较,如图5所示。
当然,在Dpot的整个设置范围内,Rw消除的完美程度并不比R5R6提供的2.5v DC偏置下Dpot的257个不同抽头上的Rw匹配更好。给定电位器的电阻阵列内的典型匹配看起来不错,但制造商并没有承诺这些,制造商只承诺了+/-20%左右的系数。不过,将Rw降低到五分之一仍然有用。
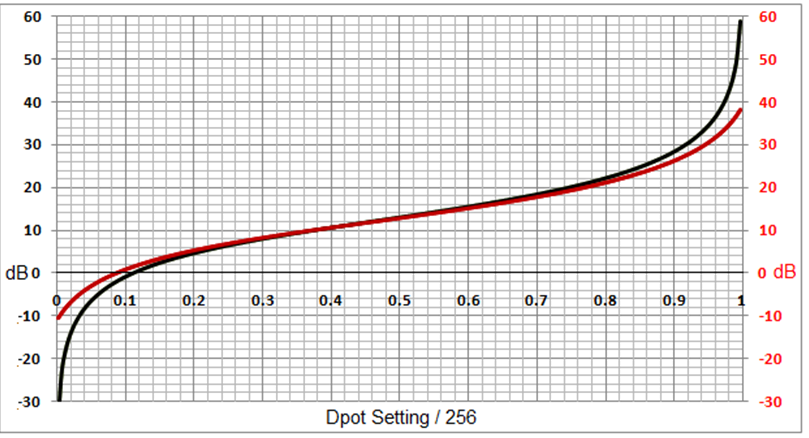
图4:红色曲线表示未补偿的Rw(~150Ω),请注意跨度两端的20dB损耗。黑色曲线表示用负电阻补偿Rw的情况(R4=Rw=150)。
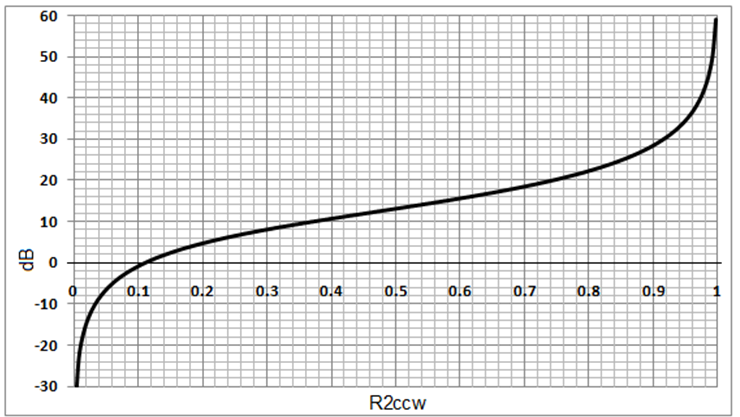
图5:使用机械电位器的增益曲线与带有负电阻Rw补偿的Dpot相同。
注:在发表该实例的机械电位器版本之后,我了解到T.Frank Ritter先生早在50多年前就在其著作“用一个电位器控制运算放大器增益”中提出了该想法,该文发表于1972年麦格劳-希尔出版公司出版的《电子设计师案例手册》上。
因此,我在此向Ritter先生致以迟来的热情敬意。我一直很钦佩先驱者!
(原文刊登于EDN美国版,参考链接:Digital pot can control gain over a 90 dB span like an electromechanical,由Ricardo Xie编译)
 最前沿的电子设计资讯
最前沿的电子设计资讯
