
对于一般人来说,上下楼梯并不是什么难事,但对于需要使用轮椅出行的人来说就不一样了,除非有专门的无障碍设施,不然小小的楼梯就会成为他们出行无法跨越的障碍。
而在近日,韩国机械材料研究院(KIMM)的研究团队开发出一种受液滴表面张力启发的变刚度变形轮,旨在通过实时调整轮子的刚度来克服各种障碍物,如楼梯和岩石。
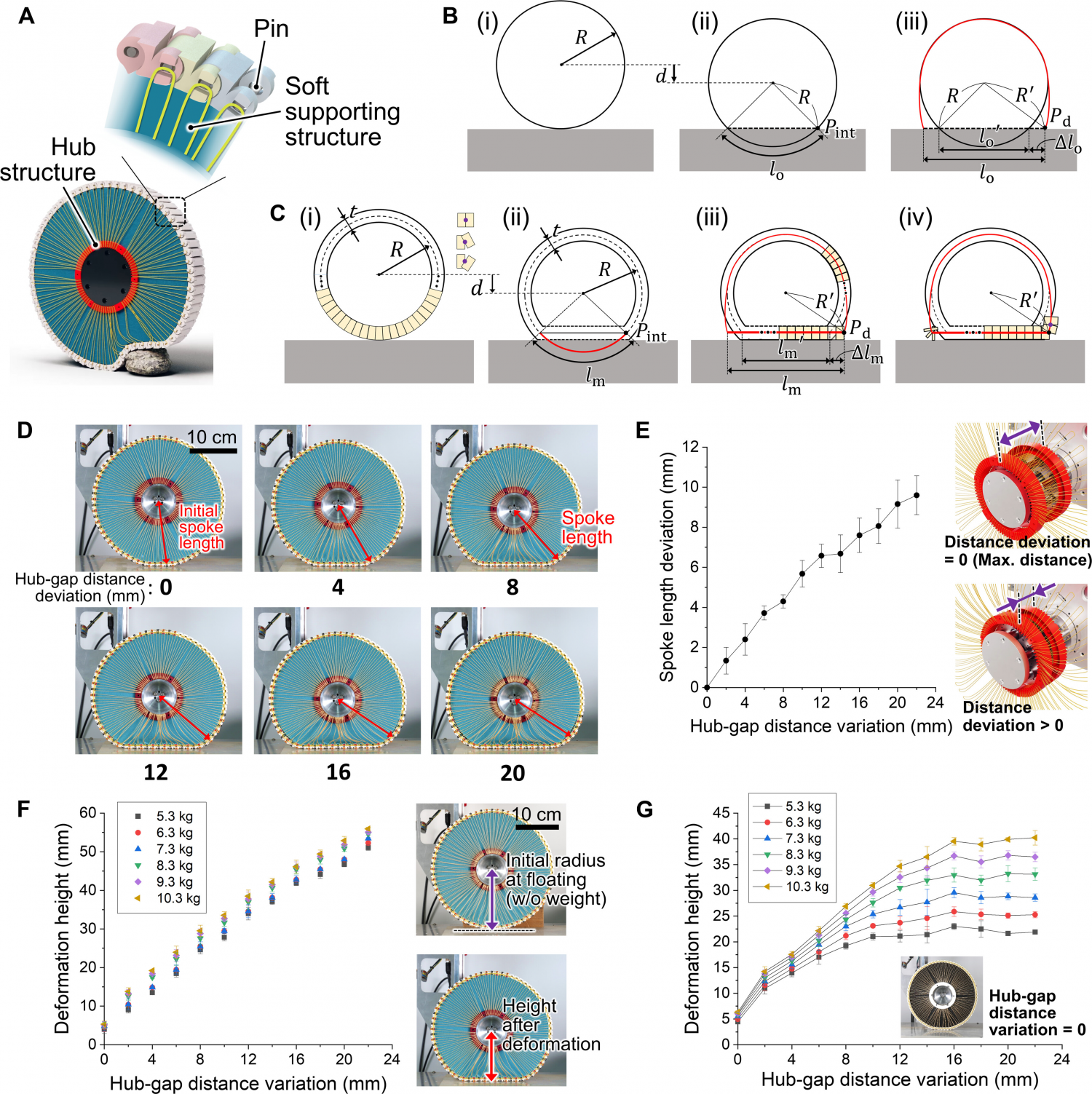
传统的柔性结构车轮虽然能够适应不同地形,但在平坦路面上行驶时会不断变形,影响行驶效率和稳定性。该研究团队开发的变形轮则与之不同,其由智能链块和柔性结构组成,通过钢丝辐条结构来控制智能链块的表面张力。当轮毂结构转动或距离改变时,钢丝辐条结构会被拉紧或放松,从而改变智能链块的表面张力,实现轮子刚度的调整。

具体来说,如果钢丝辐条将智能链块向内拉,最外层智能链结构的牵引力就会增大,类似于液滴表面张力的增加,会导致拉动最外层液体分子的净力增加,从而使液滴稳定地保持圆形。相反,如果钢丝辐条结构松动,刚性就会下降。因此,在常规驾驶模式下,该轮子可以作为刚性圆形轮子运行,而在需要越过障碍物时则可以切换到柔软的可变形状态。
根据测试,在双轮轮椅系统中,车轮的刚度可以实时改变,使轮椅能够在有限的空间内稳定地移动和改变方向,并且可以越过岩石或18厘米高的楼梯等障碍物,而针对四轮移动系统,变形轮则能够克服比车轮半径高1.3倍的障碍物。
据悉,这项技术除了能应用在轮椅上,为使用者提供出行的便利,还有望广泛应用于轮式机器人和运输系统中,克服传统机械设备在越障方面的局限性。
 最前沿的电子设计资讯
最前沿的电子设计资讯
