
雷达和LiDAR是感知周围环境的两种关键技术,广泛应用于汽车、机器人、安防、环境监测等行业。
这两种技术的基本目的是一样的,即从不同距离检测物体的存在和体积,但了解它们之间的差异很重要。这两种技术的原理都是发射信号并测量反射信号返回接收器所需的时间,从而确定被检测物体的距离、速度和其他特征。
这两种技术都旨在探测和揭示周围环境中可能存在的物体,但采用的方法不同。LiDAR和雷达的主要区别在于,LiDAR使用紫外线、可见光或近红外波长,这样就可以定位和获取尺寸与所用波长相等的较小物体的图像和信息。LiDAR对悬浮在云中的粒子非常敏感,因此被广泛应用于气象学领域。它使用激光脉冲来检测和定位物体,它发射的脉冲会被环境中的物体反射,测量它们的飞行时间以确定与物体的距离。
该技术允许用户创建周围环境的详细3D地图,通常用于自动导航、辅助驾驶和机器人技术。另一方面,雷达使用无线电波来检测和定位物体。它发射无线电脉冲,这些脉冲被环境中的物体反射,分析返回信号以确定物体的距离、速度和方向。雷达特别擅长检测金属物体,并且可以在雨、雾和雪等恶劣天气条件下工作。
这两种强大的物体和障碍物检测系统(见图1)目前在自动驾驶汽车中很受欢迎。设计人员和企业的所有研究和努力都集中在减少道路交通事故上,而除非该技术得到最大程度的完善,同时相关立法得以出台,否则交通事故将一直存在。雷达是“无线电探测和测距”(Radar,Radio Detection And Ranging)的首字母缩写,它使用无线电波发送非常高频的信号,并等待信号从物体上反射回来时接收该信号。如果接收到信号,就会计算出飞行时间、信号、多普勒效应和其他参数,以确定和追踪汽车、行人和障碍物的位置以及相对移动速度。雷达信号可以穿透雨雾,因此天气条件不会成为检测的障碍。
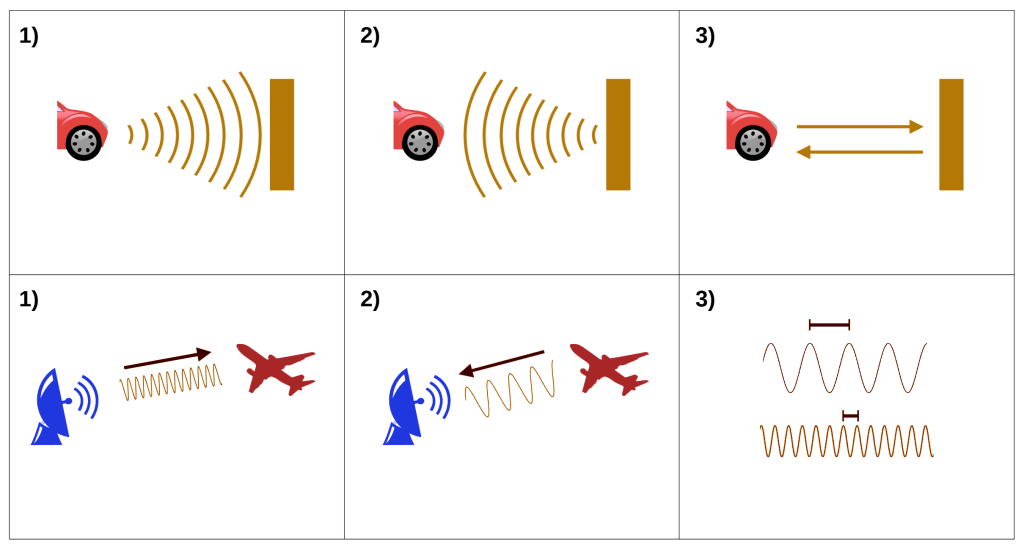
图1:雷达和LiDAR的工作原理
无线电波的不同频率使雷达能够适应特定的功能,例如探测飞机和船只,甚至监测自然事件。相反,LiDAR是“激光探测及测距” (LightLaser Detection and Ranging)的首字母缩写。它利用激光脉冲来测量物体的距离和速度,从而实现光波传感和遥测。实际上,它的工作原理是快速发射激光脉冲,并测量从周围物体反射回传感器所需的时间。利用这种技术,可以生成发射器周围所有事物的精确地图。LiDAR技术适用于创建周围环境的三维表示,其中可以包含房屋、建筑物、树木和人的有效描述。
人们经常在雷达和LiDAR之间进行性能比较。目前,后者无疑是一种比雷达更昂贵的技术,但它的优势在于可以产生更精确和更明确的扫描,因为激光的波长比雷达的无线电波更短,这使用户能够更好地分辨物体和小细节。然而,雷达在雾天或雨天工作得特别好。无论使用哪种技术,选择LiDAR还是雷达都要取决于具体应用的需求以及它们的使用环境,每种解决方案都有优点和缺点。
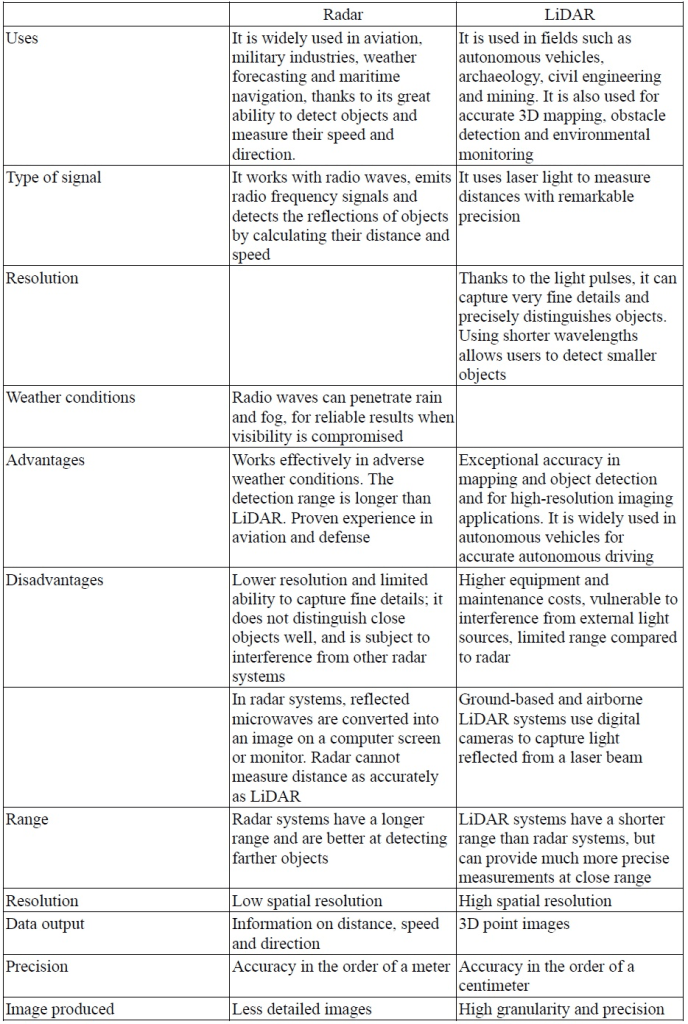
如图2所示,LiDAR比雷达提供更详细的周围环境图像。
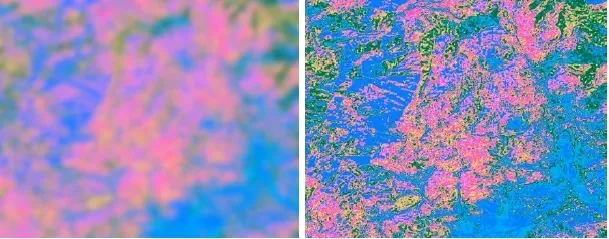
图2:左:雷达产生的图像;右:LiDAR产生的图像
雷达和LiDAR的工作原理基本相同,不同之处在于使用的传输频率。具体来说:
LiDAR
雷达
本段深入探讨了LiDAR系统的概念和操作。它是一种基于光的遥感技术。将激光束(通常是红外线)投射到物体表面,然后测量激光返回光源所需的时间(见图3中的地图)。有些LiDAR系统可以360°“观察”周围环境,并允许操作人员获得描绘周围环境的三维点系统。LiDAR的波长约为532nm、905nm甚至1550nm,因此可以扫描极小的物体。
该技术的工作原理是发射激光脉冲,并测量脉冲从物体反射并返回传感器所需的时间。因此,它以光速为参考计算飞行时间(TOF)。一些系统使用旋转镜或扫描仪来引导激光束并覆盖更大的区域,其他类型的系统则使用光开关,还有一些系统使用单个激光脉冲照亮场景并使用2D检测器阵列来捕获反射光,从而实现更快的数据采集。
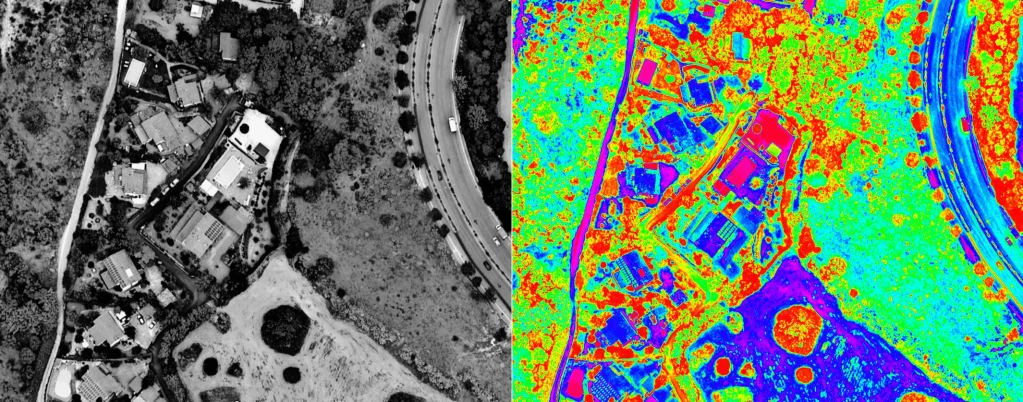
图3:使用LiDAR扫描制作的详细3D地图
LiDAR技术在分辨率、范围和扫描速度方面不断改进。大多数现代系统采用固态组件代替机械解决方案,可以通过单个激光束和传感器阵列获取3D地图。一些远程系统探测距离可以达到一公里,精度达到厘米级。LiDAR系统通常由一个激光源组成,该激光源会发出极快的闪光,这些闪光在空间中传播,直到遇到物体,系统还可以将激光脉冲引向不同方向,以扩大作用范围。最后,还有一个接收能力极强的探测器,用于测量光脉冲击中物体并返回所需的时间。不难理解,LiDAR解决方案对于安全自动驾驶汽车开发的重要性。
雷达使用无线电波,通过旋转或固定天线发射无线电波,测量反射信号的飞行时间。雷达的波长在30厘米到3毫米之间。它是一种主动遥感技术,利用无线电波来检测和跟踪物体(见图4)。它工作在电磁波谱的射频频段,通常在微波范围内。雷达系统中使用的常见频段如下:
高频无线电波由强大的发射器产生,并通过天线发射。这些无线电波在大气中传播并反射路径上的物体,反射信号由雷达天线接收并由灵敏的接收器处理。多普勒效应引起的频率偏移对于准确确定物体的距离、速度和方向非常有用。雷达系统通常由发射和接收无线电波的天线组成。
然后是发射器,它产生射频信号并由天线发送,无线电波一直传播直到遇到物体,它们从物体上反弹,然后被反射并被接收器收集。通过分析电波返回所需的时间以及由于多普勒效应而产生的频率偏移,雷达可以计算出被探测物体的距离、速度和其他特征。系统的下游是信号处理器,它处理接收到的数据以图形方式表示或将其存储在存储单元中。
图4:经典雷达屏幕
LiDAR系统通常比雷达系统更昂贵、更复杂,因为它们需要高精度激光器、灵敏探测器和先进的数据处理系统。此外,它们需要更大的处理能力和存储容量,从而增加了数据管理和分析的成本。而且,LiDAR激光器必须有独特设计的电路驱动,能够在很短的时间内提供大量电流,不过这可以使用新的GaN半导体驱动器来解决。
相比之下,雷达系统比LiDAR系统更便宜,也更简单,发射器、接收器和天线更简单,生产成本更低,相关的运营和维护成本通常也较低,而且由于更坚固耐用,需要的校准也更少。如今,自动驾驶尚未实现100%可靠的结果,事实上,还有一些问题有待解决,这些问题会对道路上的自动驾驶性能产生负面影响。但可以肯定地说,采用了新的电子元件和人工智能,自动驾驶很快就会变得比人类驾驶更加可靠。
(原文刊登于EDN姊妹网站Embedded,参考链接:LiDAR and Radar Systems,由Ricardo Xie编译。)
 最前沿的电子设计资讯
最前沿的电子设计资讯
