
年增长率接近15%的3D机器视觉市场蓬勃载展。全球人口老龄化被认为是这种高速增长的主要驱动因素之一。具体分为两个方面:一方面,劳动年龄人口正在减少;另一方面,需要护理的人数正在增加。这就导致这两个严重缺乏合格人工的领域需要依赖更多的机器人。工业制造领域的机器人旨在更高效地生产各种产品。医疗保健部门的机器人则用于提升护理水平或保持自主性和灵活性。总体目标是让很多事情变得更易于执行。
但我们还需要完成很多研发工作以应对双足人形机器人大军的崛起。举例来说,大多数检查系统仍为静态且均固定在一个地方,然而高度动态发展的市场却不足以让瞬息万变的VGR领域,解决流动性依然相对有限的问题。牢牢固定的机器人的主要任务之一,是增加3D技术的使用以实现密切观察。内置相机技术有助于机器人从三个方向 (X, Y和Z轴) 识别物体、测量距离以及理解其任务。以离散制造更大灵活性需求为主要市场驱动力的行业增长,因工业4.0趋向于批量生产而发挥着日益重要的作用1。
VGR系统经常与用于离散制造进出料系统的AGV一起应用。预计到2027年,AGV需求将以每年14.1%的速度大幅增长。此类AGV在制造厂、仓库和配送中心移动和运输产品以消除或尽量减少对永久性输送系统(如带式或辊道输送机)的需求。它遵循用于优化储存、拣选和运输流程的可配置路径,主要用于绝对不能被传送带堵塞的工厂中央供应干线。最终,AGV将与VGA系统整合,并发展成移动拾取和放置机器人。
非常先进的移动机器人系统可能拥有几个值得关注的子系统。例如,有些四足移动机器人使用三个分别用于寻找周围路径、移动和执行任务的计算机模块(COM)。这是最佳的方法可以让制造商根据每个任务的具体要求扩展计算机模块(COM)。而在制造单元中给每个机器人配备专属独立的控制装置,也是常见的做法。此外也可以考虑将所有机器人控制装置集中于同一个系统的制造单元中,让它们通过双线以太网与驱动器的致动器/变频器直接实时通信。但这种整合需要一个更成熟完善的平台策略,且具备功能更强大的模块 (目前尚未在工业设计中出现这种模块)。上述四足机器人的初始设计使用了10个处理器核心,以确保所需的计算能力和实时能力。但此类处理器尚无法用于超低功耗移动嵌入式系统。
随着PICMG标准委员会批准了COM-HPC模块规范,COM-HPC产品现已问世,其性能大幅提升,远远超过了COM Express模块。由于COM-HPC服务器模块未来将支持服务器处理器,可提供坚固和可扩展端接的入门级模块而尤其适用于服务器类。这将使具备最耗电且分散的实时控制系统的多用途嵌入式边缘计算解决方案得到整合。这当然需要来自Real-Time Systems等供应商提供的Hypervisor虚拟化技术,用于实时虚拟机器。此类具有实时功能的Hypervisor解决方案,即使在生产单元的HMI在同一处理器上重新启动或集成物联网(IoT)网关忙于转换和评估大量机器数据并同时处理请求的情况下,也必须确保实时控制的确定性不受任何影响。
 © congatec
© congatec
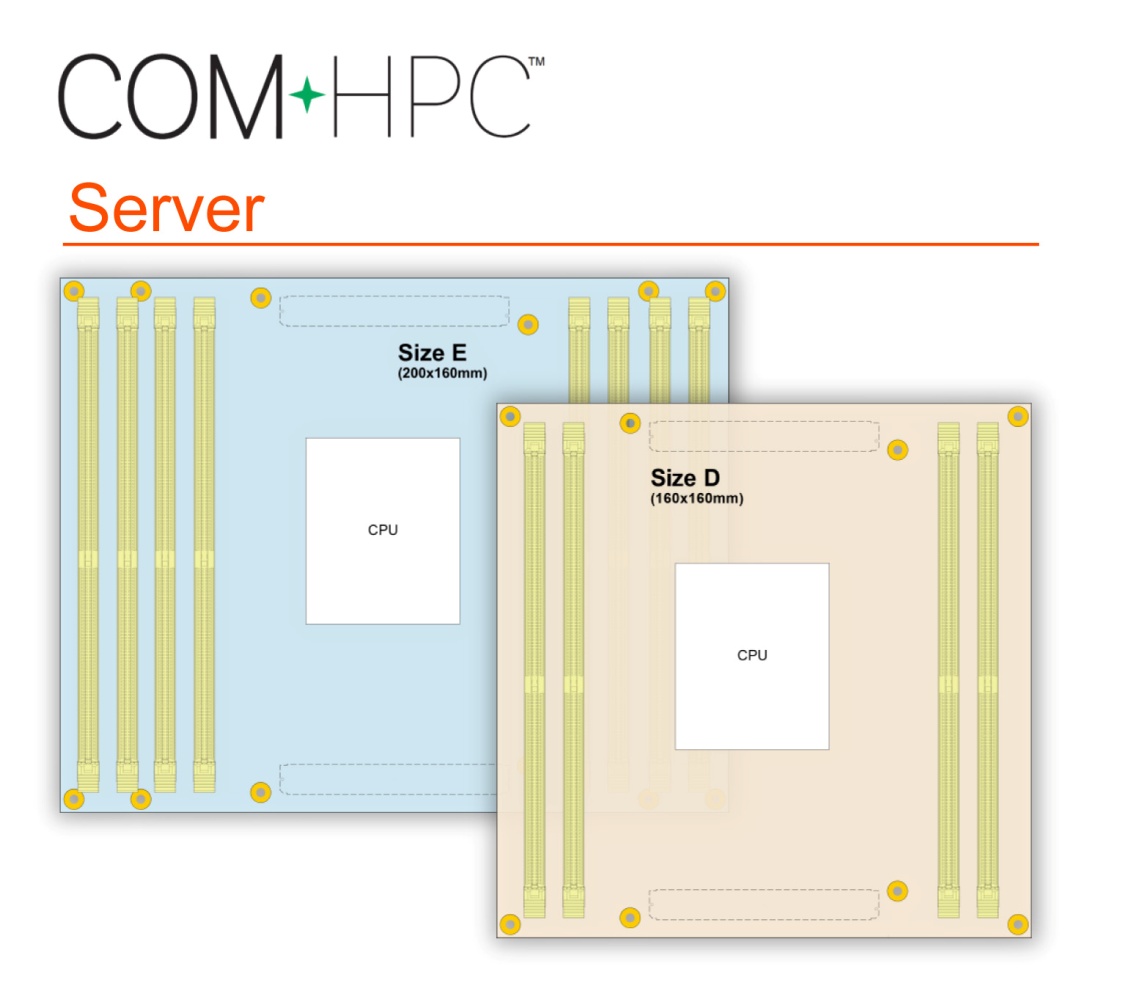
图示1: 康佳特近期将发布基于新的PICMG COM-HPC规范的服务器模块(Server-on-Module)。得益于标准化规格,可确保更长可用性,使其成为移动物流车辆和视觉引导机器人(VGR)系统中,坚固模块化边缘服务器性能平衡的不二之选。
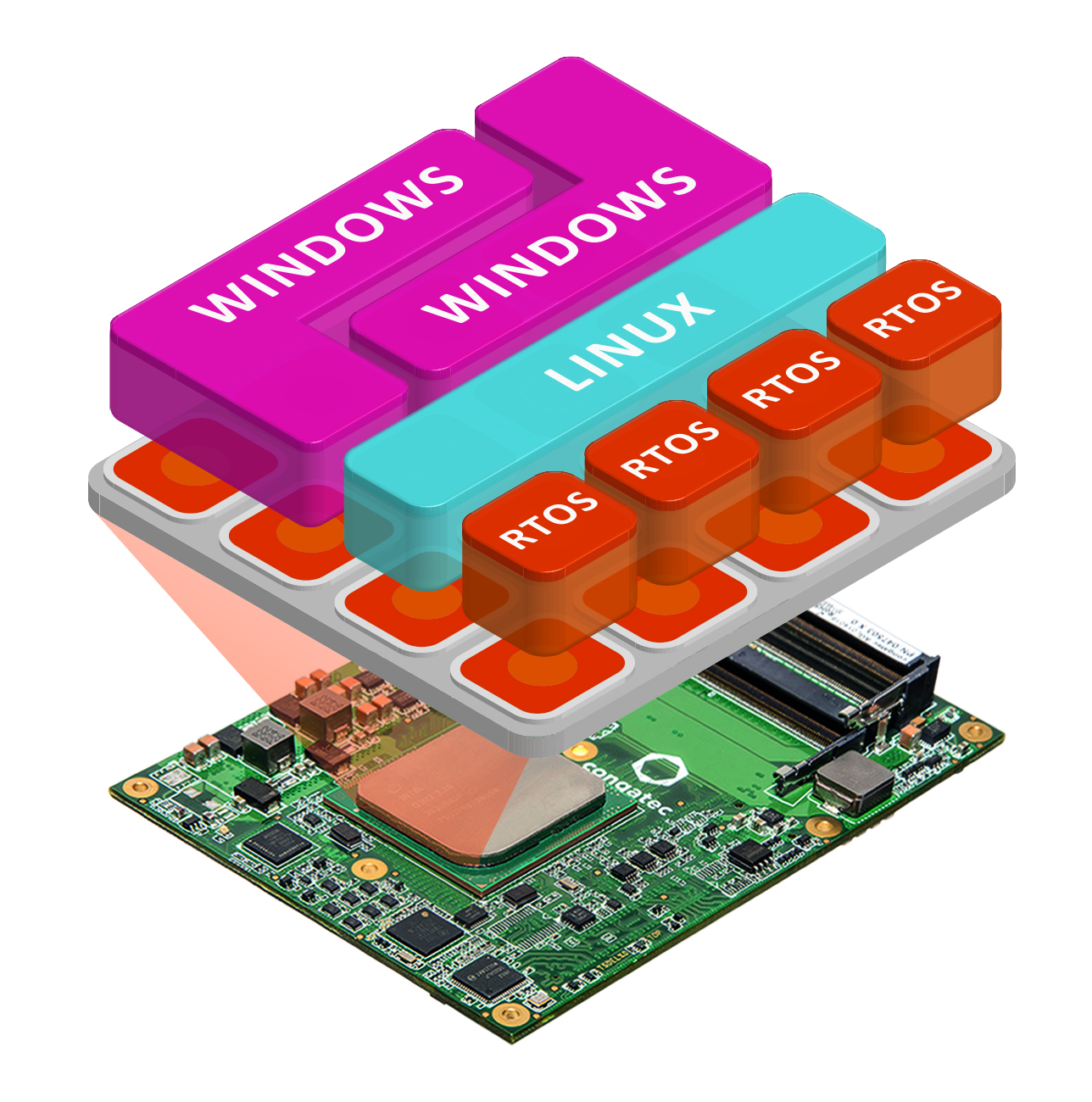
图示2:康佳特的服务器模块(Sever-on-Module)支持Real-Time Systems的Hypervisor虚拟化技术能将多个边缘应用整合到同一个系统中。
即使没有在同一个模块上集成各种子系统,COM-HPC模块基本上也是必要的,因为3D图像处理是一个复杂的任务,例如涉及透过飞行时间(ToF)技术捕获的建模需求。这将产生数量巨大的数据(每个像素都包含32bit空间坐标)。因此30fps的640x480p分辨率每秒会生成35MB的3D数据。此外经典2D相机的色彩信息通常分辨率要高4倍。我们探讨的是在120万像素 (1280 x 1024p) 和每个通道8位色深的情况下,每秒会额外生成112.5MB数据,因此必须处理每秒总体约150MB的原始数据。而有两个相机和可选结构光的立体视觉的工作量同样很高,这将对数据吞吐量和异构CPU和GPGPU计算能力提出极高的要求。目前针对这些用例推荐基于第11代英特尔® 酷睿™处理器技术 (代号Tiger Lake) 的首款COM-HPC模块。虽然是COM-HPC 客户端(Client)模块,却提供了其他模块标准所没有的备受关注的功能特性。首先,完整的PCIe Gen4接口支持使其能够在相机和处理器之间,以及用于处理大规模并行图像数据和AI算法的离散GPU之间,提供两倍于PCIe Gen3的带宽。配合本地MIPI-CSI相机使用可以降低相机技术成本并推动性能提升。该模块还支持从8x 1GbE和2x 2.5GbE (包括TSN支持) 到基于康佳特COM-HPC入门套件的双10GbE连接的高度可配置的以太网选项。这种支持可进一步扩展至包括双线以太网,以便有效地连接单个传感器和执行器等最小的外围设备。
 © Ekkasit919/dreamstime/congatec
© Ekkasit919/dreamstime/congatec
图示3: 3D视觉需要强大的计算能力,而康佳特搭载第11代英特尔酷睿处理器技术的COM-HPC模块,得益于PCIe Gen4可实现数据吞吐量翻倍。
康佳特对MIPI-CSI连接相机的全面AI支持,进一步增强了工业物联网(IoT)和工业4.0联网嵌入式系统的应用准备。AI和推理加速可以在CPU上使用基于矢量神经网络指令 (VNNI) 的Intel® DL Boost,以及在GPU上使用8位整数指令(Int8)实现。在此背景下的另一个吸引人的特性是,Intel Open Vino生态系统对AI的支持。其中包括一个功能库以及为了加速跨平台深度神经网络(DNN)工作负载,以获得更快、更准确的人工智能推理结果而优化调用OpenCV和OpenCL内核。中国英特尔实验室系统中的自主系统实验室(ASL),已经推出了一个基于COM Express的以教学为目标的平台。此外还提供了经过Intel认证,用于工作负载整合的“生产就绪”工具包。利用新的COM-HPC模块,现在可以从软件库到自适应人机交互(AHRI),或基于COM-HPC规格尺寸的同步定位与导航(SLAM)来评估OpenVINO生态系统。
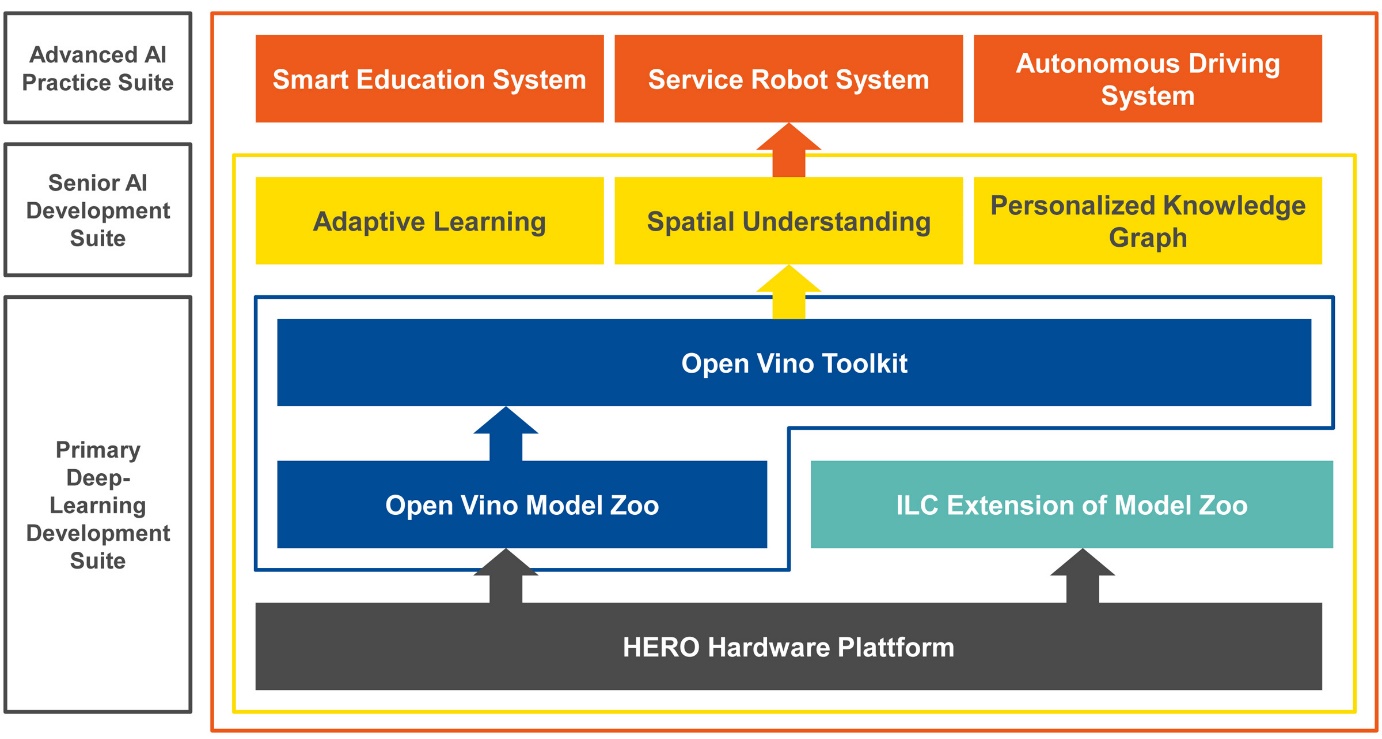
图示4: 英特尔(中国)实验室系统中的自主系统实验室,所开发的基于康佳特COM的教学工具包提供了三个层面的扩展。
ATX 载板 conga-HPC/EVAL-Client 提供评估智能视觉机器人和自动物流车辆所需的全部功能。其具有两个高性能PCIe Gen4 x16接口以及广泛用于数据带宽、传输和连接器的LAN选项 (包括2x 10GbE以及2.5GbE和1GbE支持)。运营商可利用夹层卡运行更强大的接口(可达2x 25GbE),使该评估平台成为大规模网络边缘设备的完美解决方案。本文介绍的COM-HPC Client设计入门套件的核心,是基于不同处理器配置的conga-HPC/cTLU模块。每种配置都有三种不同的散热解决方案,来匹配整个可配置的12-28w TPD范围的第11代英特尔® 酷睿™处理器。
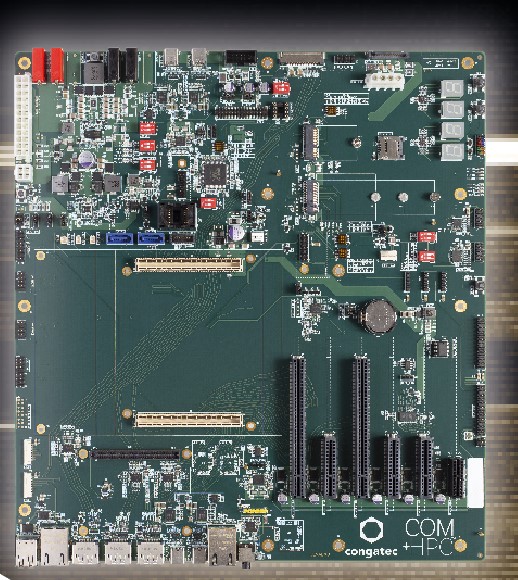
图示3: ATX 载板 conga-HPC/EVAL-Client 提供评估智能视觉机器人和自动物流车辆所需的全部功能。
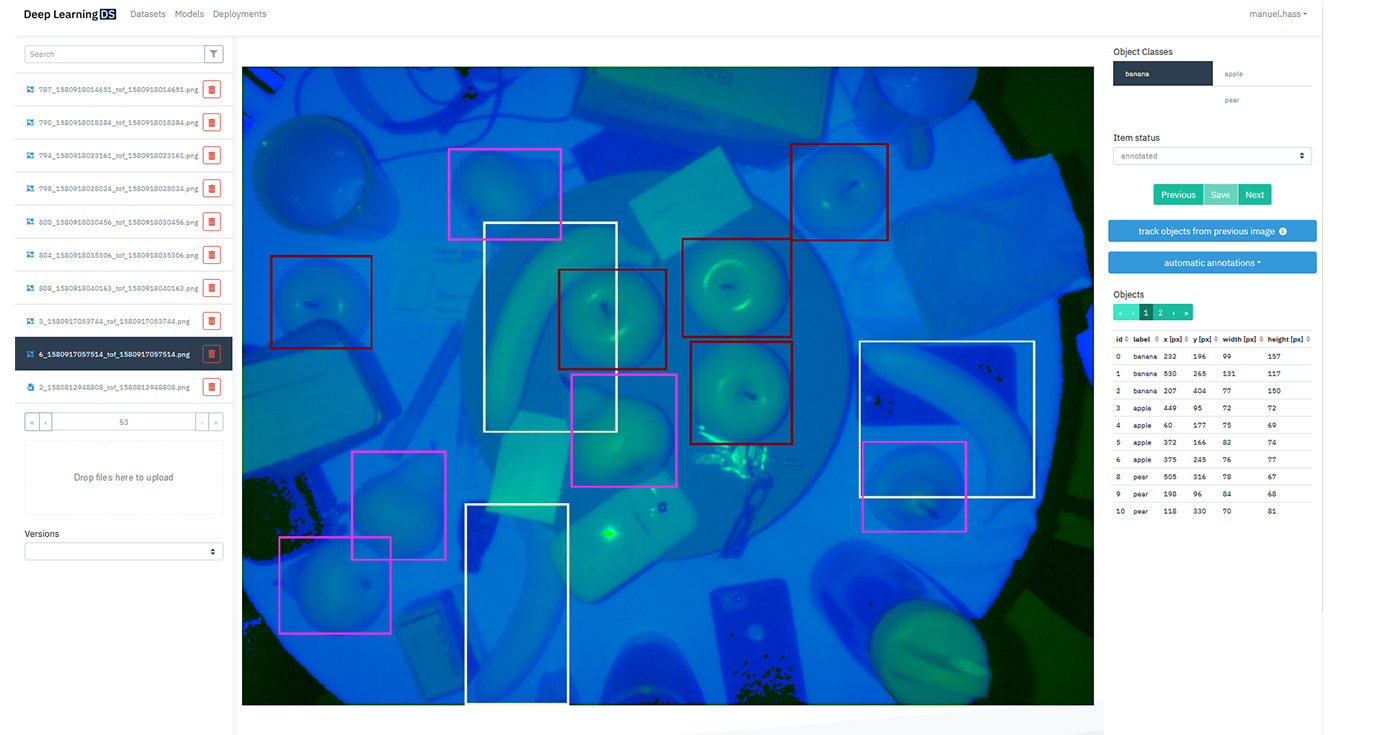
这个基于深度学习的视觉系统,包含一个可轻松与康佳特嵌入式系统结合的Basler blaze飞行时间(ToF)相机。而Basler blaze 相机可以捕捉到精确度接近毫米的高分辨率3D图像,它不仅可以生成灰度图像,还能利用ToF技术测量近红外范围内的光脉冲,以捕捉到每个像素的距离,最终的图像是可以提供所捕获场景额外信息的3D点云。色彩信息相比2D GB图像,被形状数据替代,具有同时检测红绿苹果以及支持其他应用(如被检测物体的精确定位和测量)的优势。Basler blaze相机其简单易用的跨平台编程接口,使其易于集成来自Data Spree的深度学习DS软件。这种基于深度神经网络(深度学习)且易于使用的软件解决方案,使开发深度学习模组便得更轻松,并大幅简化从数据采集、注释、训练和部署,到训练后的网络在目标硬件上的应用等个别系统开发步骤。

Basler dart系列型号为加添图像处理到普通处理器,提供了适合任何嵌入式系统设计的模块与载板架构的完美起点。基于MIPI CSI-2视频接口标准,Basler专门开发的适用于MIPI接口的定制BCON相当容易集成。这意味着适用于MIPI接口的BCON 型号可以像任何即插即用相机接口(如USB 3.0)一样轻松部署。BCON(Basler Connectivity的简称)意味着在嵌入式行业现有数据传输标准(如LVDS或MIPI CSI-2)中,增加了经过验证的强大机器视觉功能。得益于集成到机器视觉标准(GenICam)领域以及引入pylon SDK,使基本技术的使用前所未有地容易,最终使高带宽实现稳定的数据传输。
 最前沿的电子设计资讯
最前沿的电子设计资讯
