
日前,在第九届EEVIA年度中国电子ICT媒体论坛暨2021产业和技术展望研讨会上,NI资深汽车行业客户经理郭堉带来演讲主题:《平台化测试方案应对无限自动驾驶测试场景》。内容包括四个部分:

讲到挑战,就必须提到目前汽车行业非常流行的三大“零”愿景:零事故、零排放、零损耗。
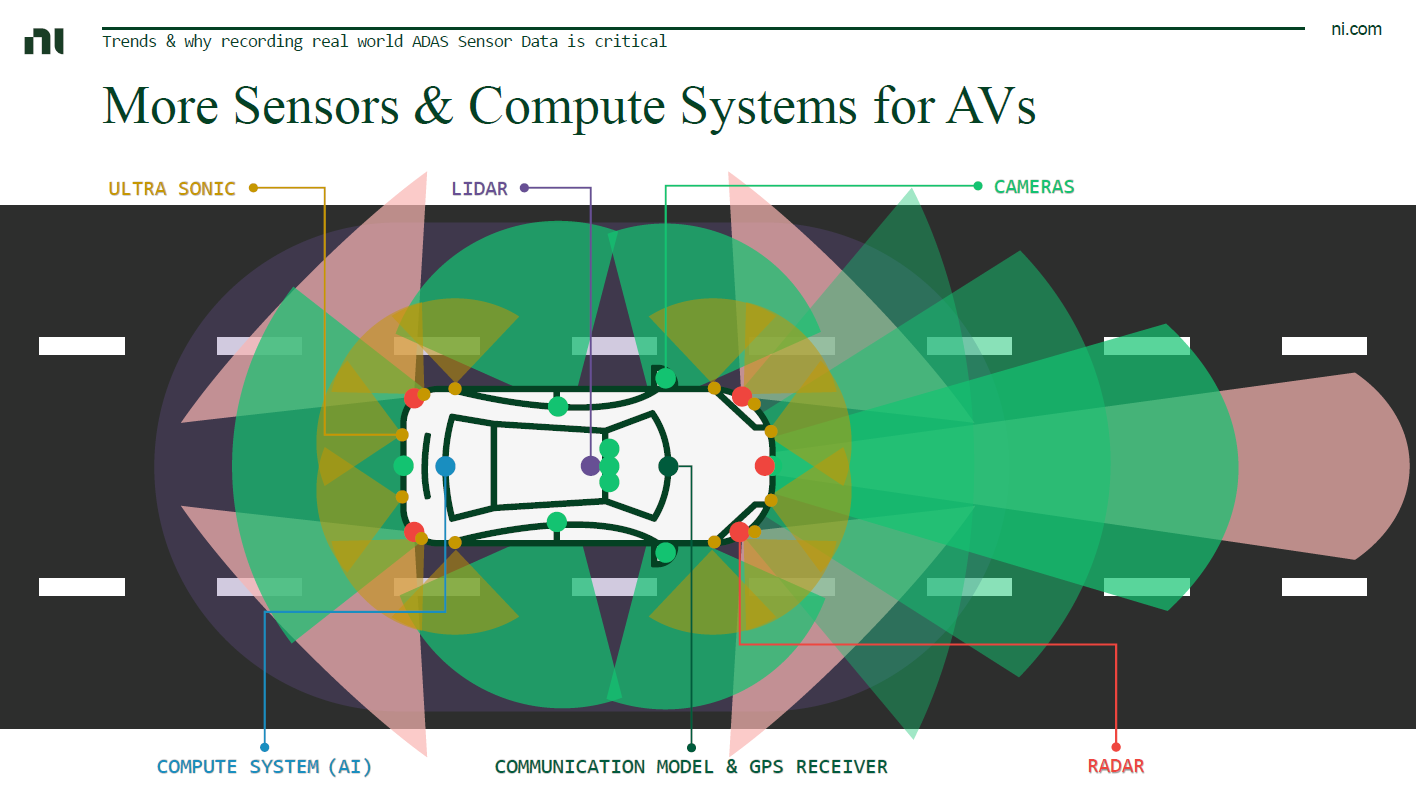
郭堉表示:“对零事故和零损耗这两大愿景,我们的技术就显得非常重要,因为ADAS里面需要传感器,包括激光雷达等感知技术,帮助实现L2到L4级的自动驾驶,以及识别目标物,从而做避障。”
目前自动化驾驶有四个趋势:
第一是电子电气结构。从原来的传感器都用ECU进行处理,到后续都用中央域控制器进行处理,这也会带来很多新挑战。
第二是目前的法规还不是特别完善。对于中国来讲,我们的场景库搭建得也不是特别完善。由于不断完善的法规,这也会带来很多新的测试需求和测试挑战。
第三是目前非常耳熟能详的概念——软件定义汽车。比如,特斯拉OTA技术是通过软件定义它的发展,软件的投入和软件的测试也会显得非常重要。
最后是AI和深度学习,这一块也是非常火。“这一块主要就是部署在ADAS里面的一些算法,通过真实的道路场景,不断优化ADAS的算法。然后更好地识别目标物,从而使我们的安全性有更大的提升,消费者也会更加信赖我们全自动驾驶的模式。”郭堉说。
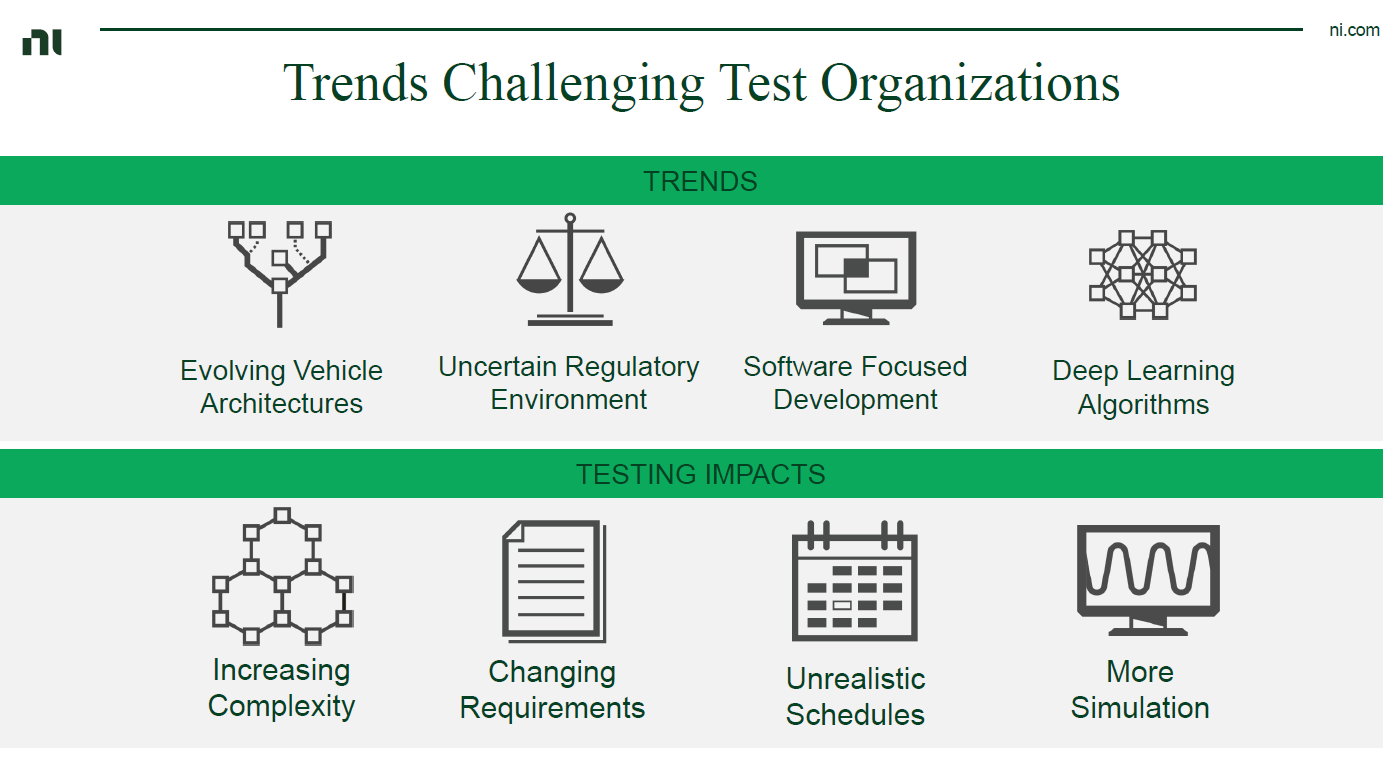
由此带来的测试挑战包括:
第一,测试的复杂度日益增加。
第二,自动化测试的硬件和软件需要有不断的迭代和更新,包括提供完整的工具链,帮助工程师最大化工作效率,并且不需要一直学习新的工具。
第三,非常紧迫的测试开发流程和周期。“这一点就是汽车以后越来越多会向消费类电子的模式去发展。随着造车新势力的不断增加,我们需要非常快速的验证平台,最大化测试的效率。”郭堉说。
最后是更多的仿真。这意味着更多的测试以后会停留在软件在环的测试中。为什么要做更多的仿真呢?“目前消费者对特斯拉的自动驾驶安全性还是存有很大的疑虑,我们需要很多真实的场景不断地训练算法。如果部署很多车队,让它去跑真实的道路,要花费的成本和时间无法想象。所以就需要构建一个非常高保真度的软件测试环境,去训练AI的算法,帮助我们识别目标物,从而达到避障和主动驾驶的功能。”郭堉指出。
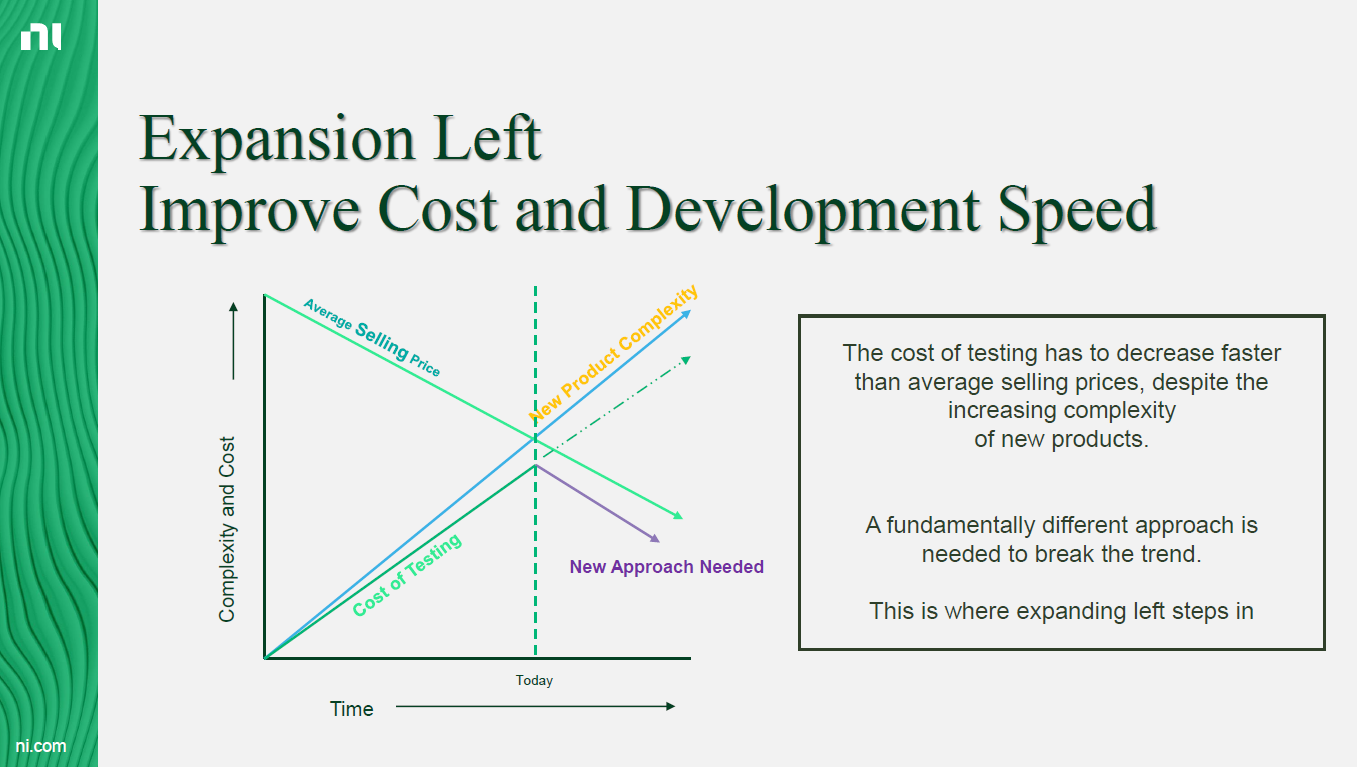
产品的复杂度日益增加,汽车价格却一直在降。因此必须采用新的测试方法,改变整个测试思路。不同于传统汽车的测试,对于ADAS全新的技术框架,需要找到一个新的测试方法。
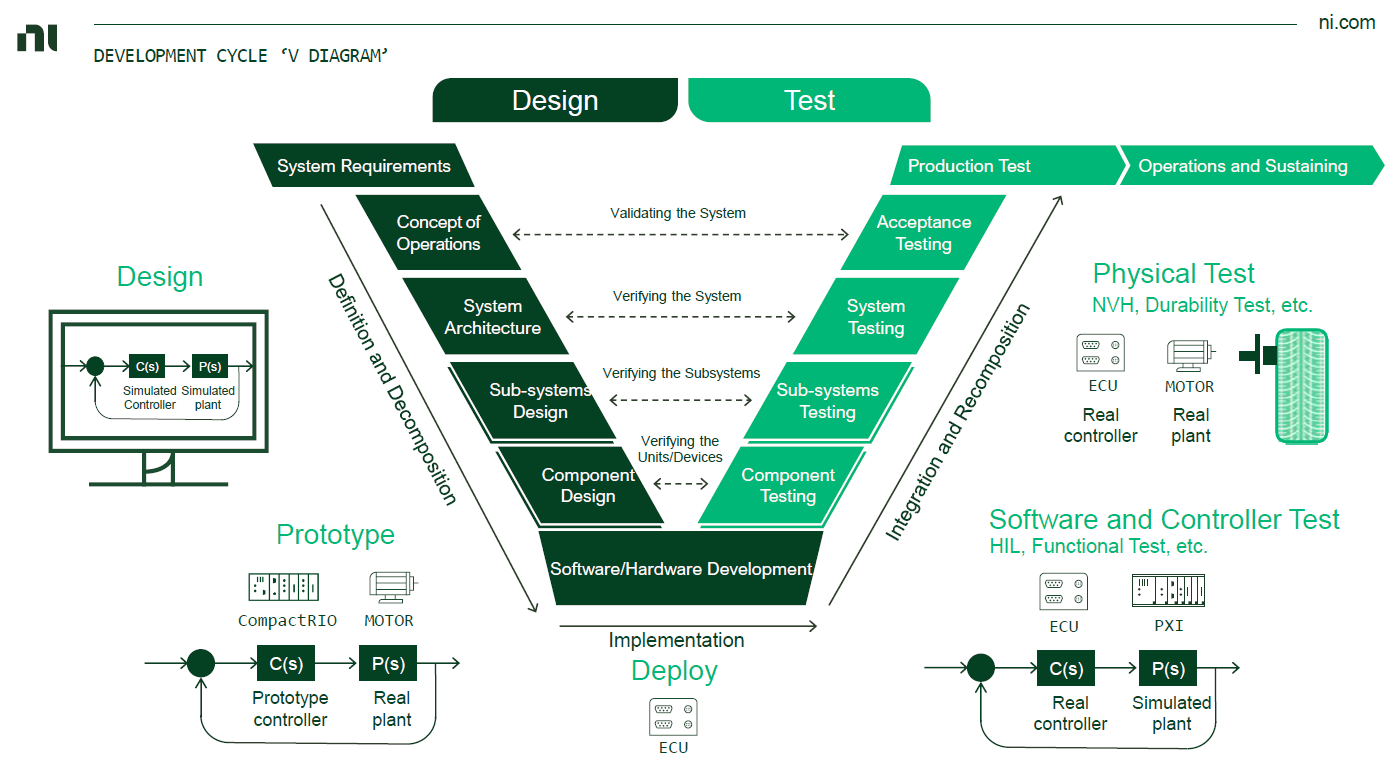
下图是我们经常看到的V字型汽车测试研发和验证流程。“左边都是设计环节,从最底层系统的要求,慢慢部署到每一个子部件的研发。左边主要会依赖于软件,包括原型验证的环节;右边是从部件的测试,再上升到整车级的,比如NVH可靠性的测试。但以往都是将更多精力投入在右边的测试环节,尤其是整车测试,但是随着ADAS技术的不断完善,我们更需要的是左边,测试需求向左移。我们需要更多进行软件测试,提高测试效率。”郭堉再次指出。
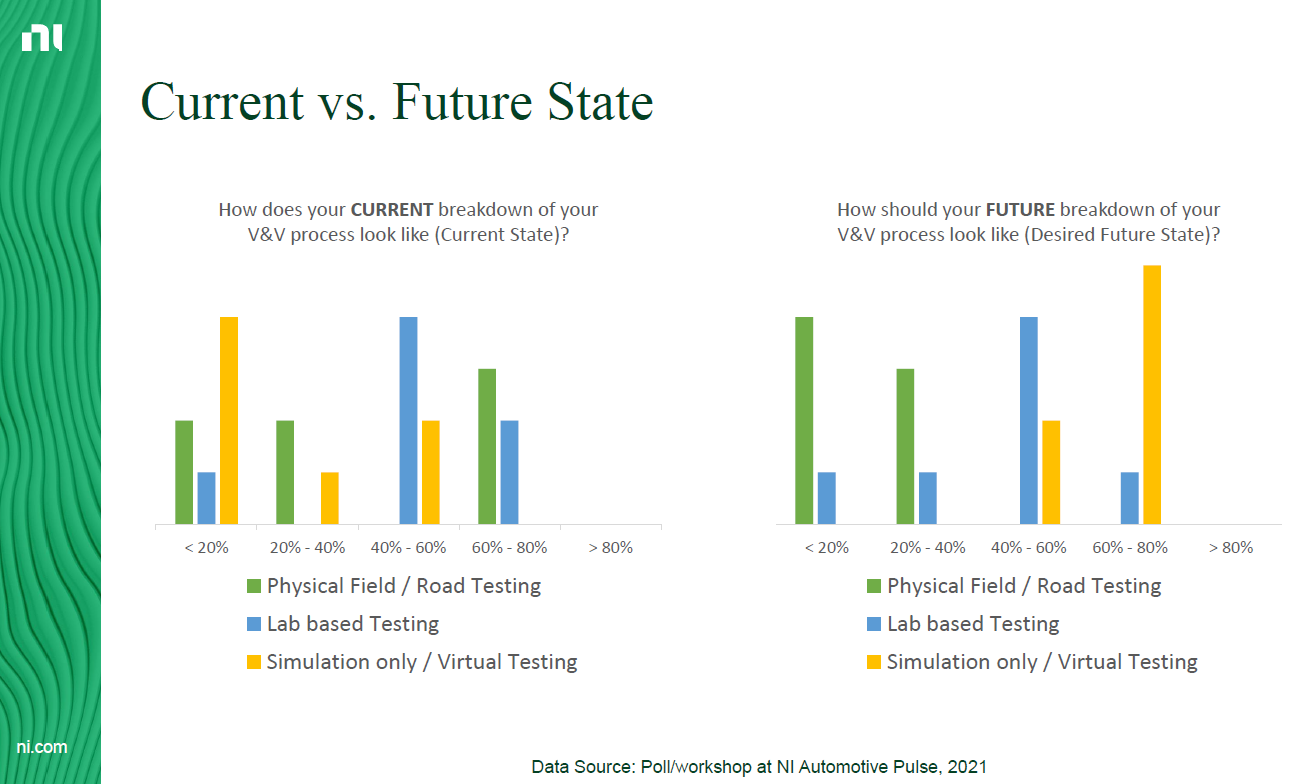
下图是NI在5月份邀请很多公司的测试总监、测试主管做的问卷调查。左边说明目前所有的测试手段还是基于硬件测试或者真实的道路测试。对于仿真测试,目前很多客户觉得仿真模型还不是特别保真,验证出来的数据不是特别可靠,但在未来会更多需要仿真测试。这个调查报告共同的需求是通过仿真测试提高效率。
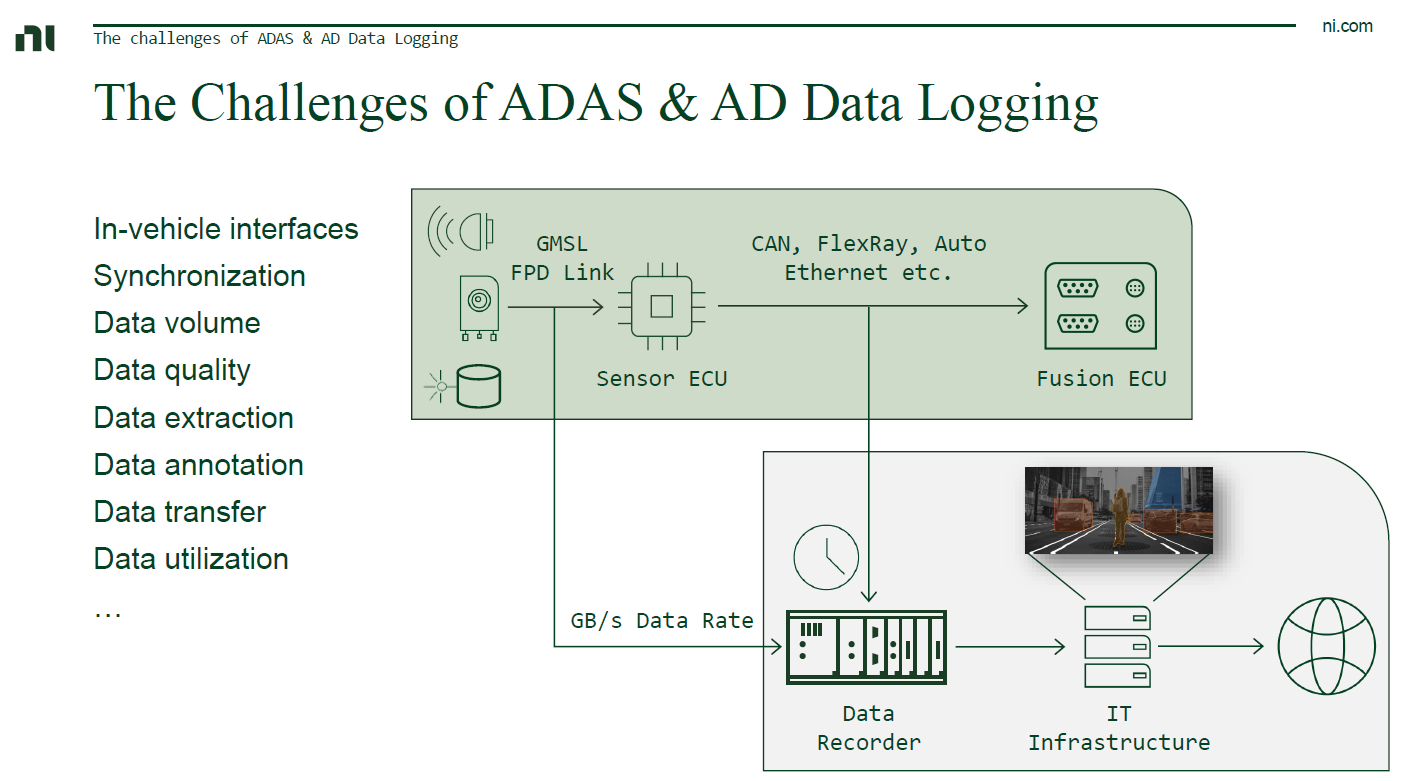
为什么目前还不能达到未来的状态?主要有五个难点:
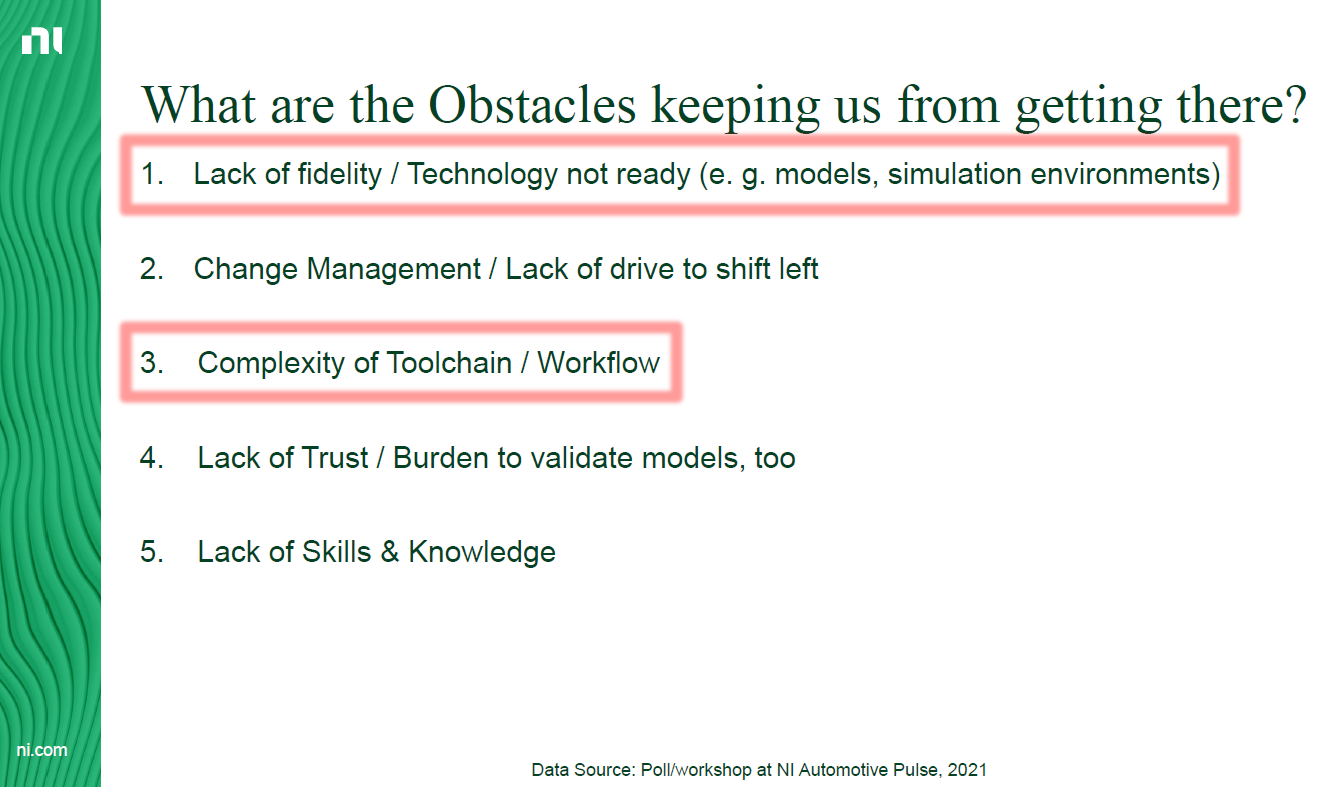
“一是缺少高保真度的模型和场景。没有高保真度的模型和场景,就无法去媲美真实采集到的道路状况,通过仿真的方法就没有办法保证ADAS汽车路面上和场景中所跑的结果一样。二是目前很多厂商之间的链路没有打通,会需要很多工程师去打通各个厂商之间的链路,从而需要对测试的流程和工具链进行重新学习,不同的厂商需要学习不同的硬件。另外,中国还没有出台非常明确的法规,特别是中国没有特定的场景库,现在所有的场景库很多都是从欧美来的,因此中国急需搭建自己的高保真仿真库。”郭堉解释说。
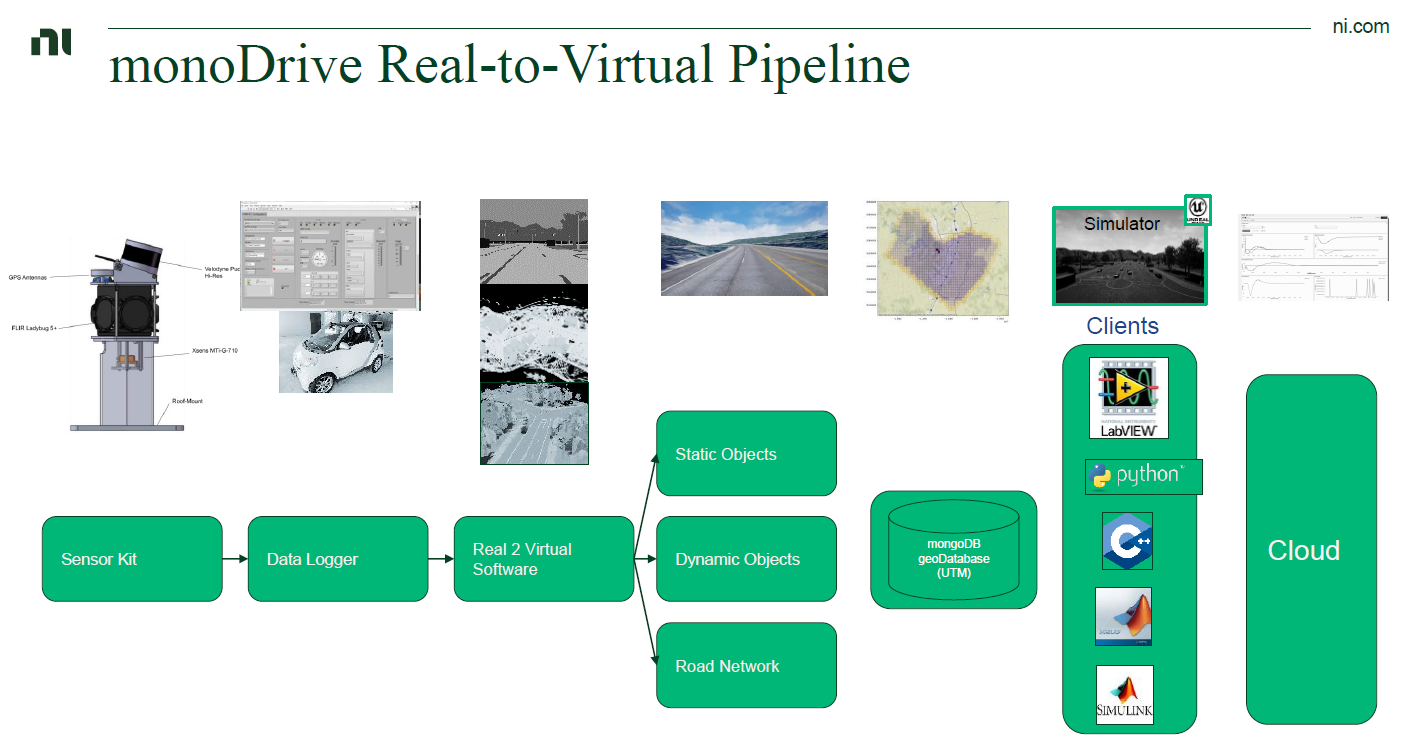
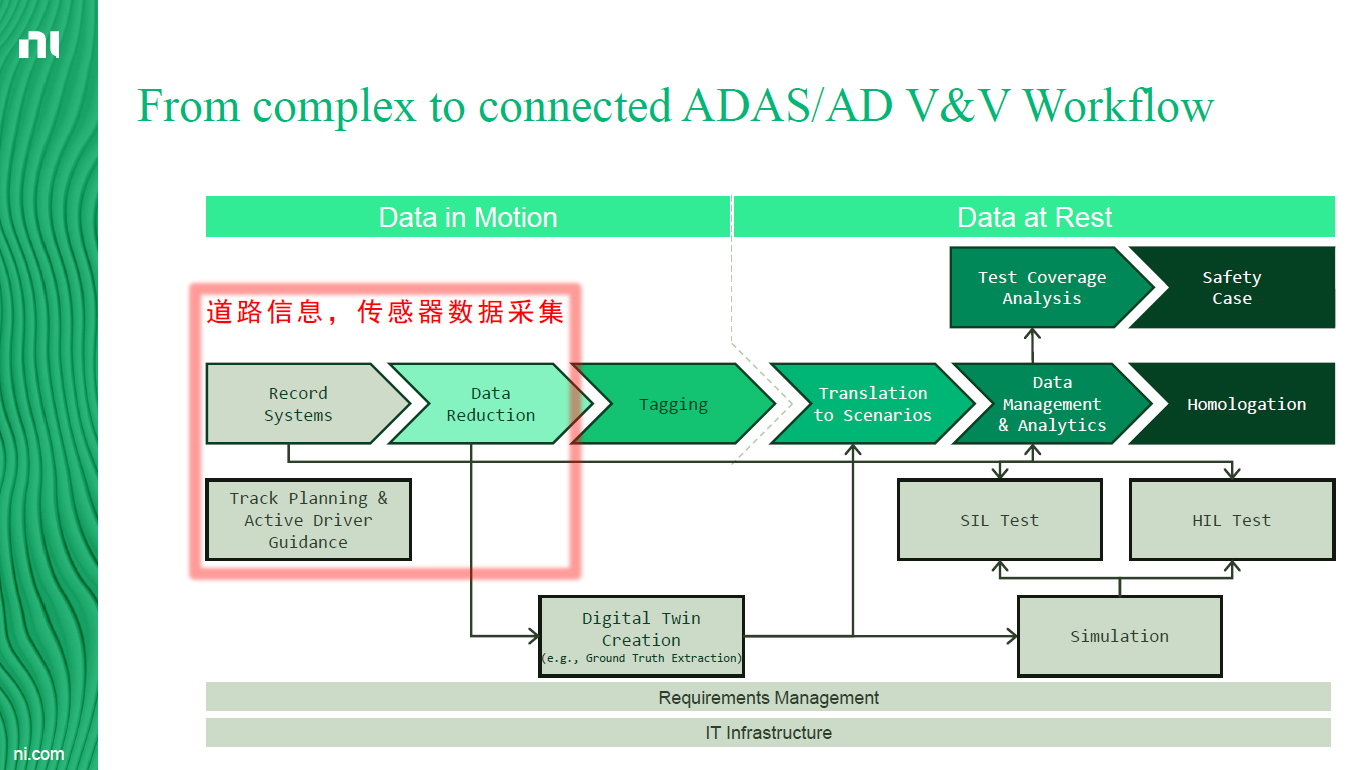
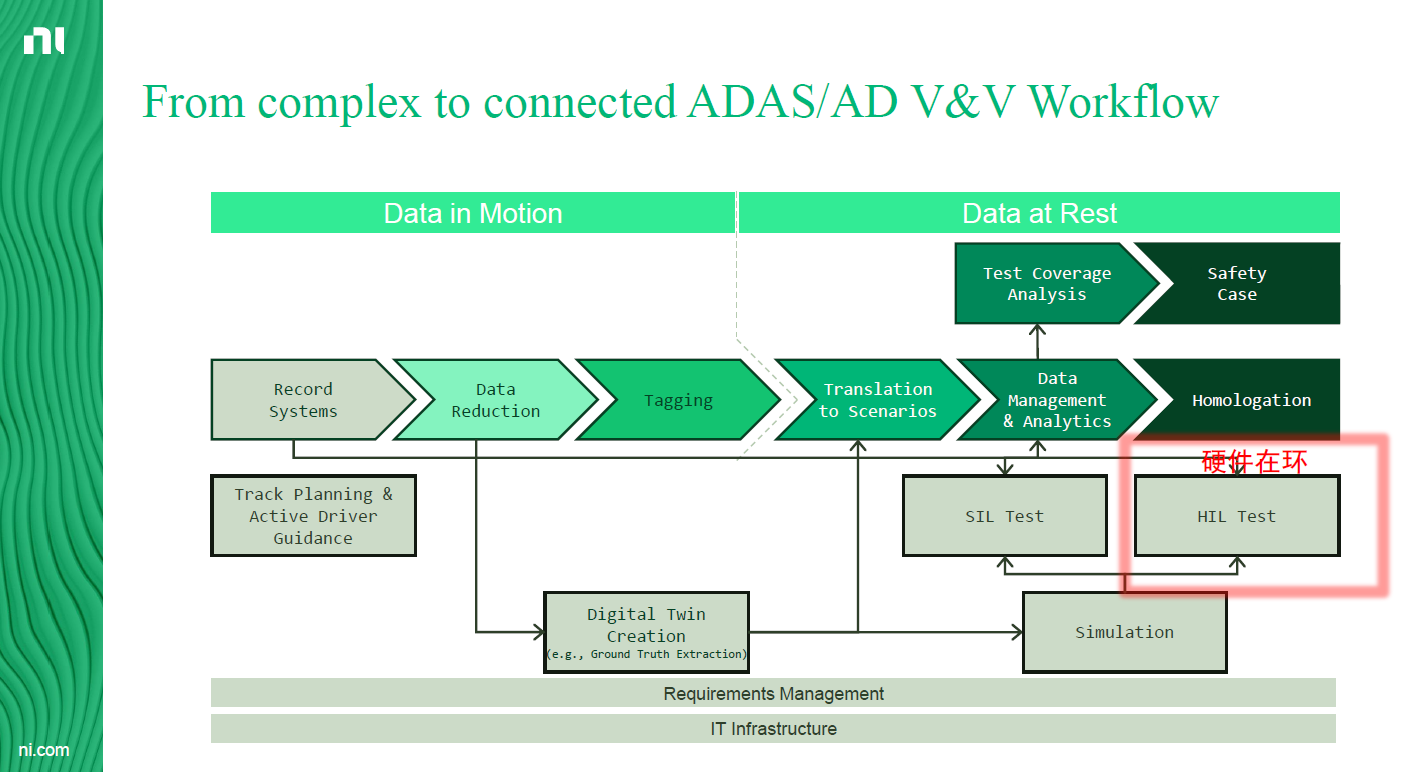
下图是做ADAS测试验证的典型工作流程。
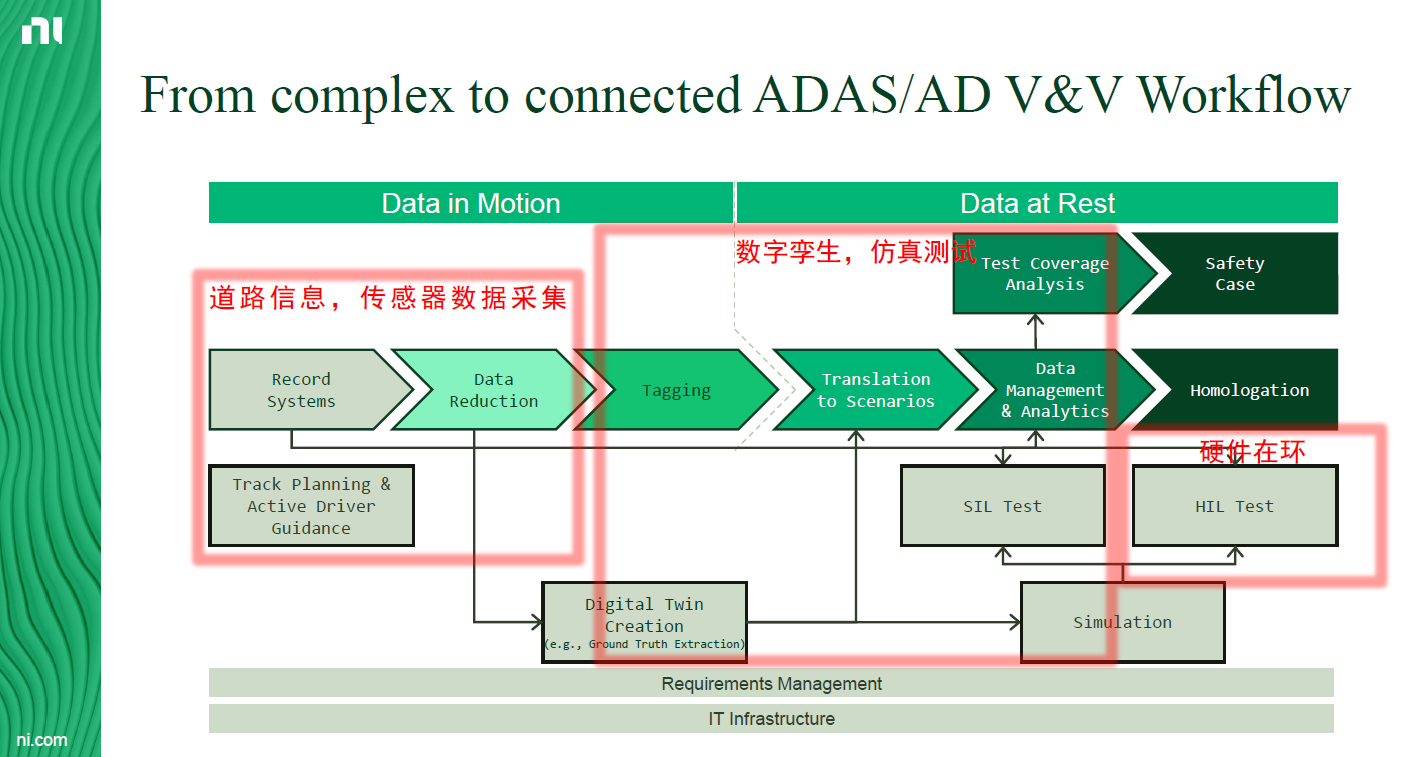
左边是动态的数据,需要把它用一套系统录制下来,录制得越真实,数据可靠性越高。录制完了之后要做什么?首先要打标签,然后就可以对数据进行重构。这里就要提到数据孪生的技术。可以把这个重构的数据通过软件重构为一个虚拟的场景,这个场景要求的可靠性是比较高的。另外可以把这个数据进行数据管理,然后进行测试。完了之后,就可以把这个数据和高保真场景一起进行硬件在环仿真。
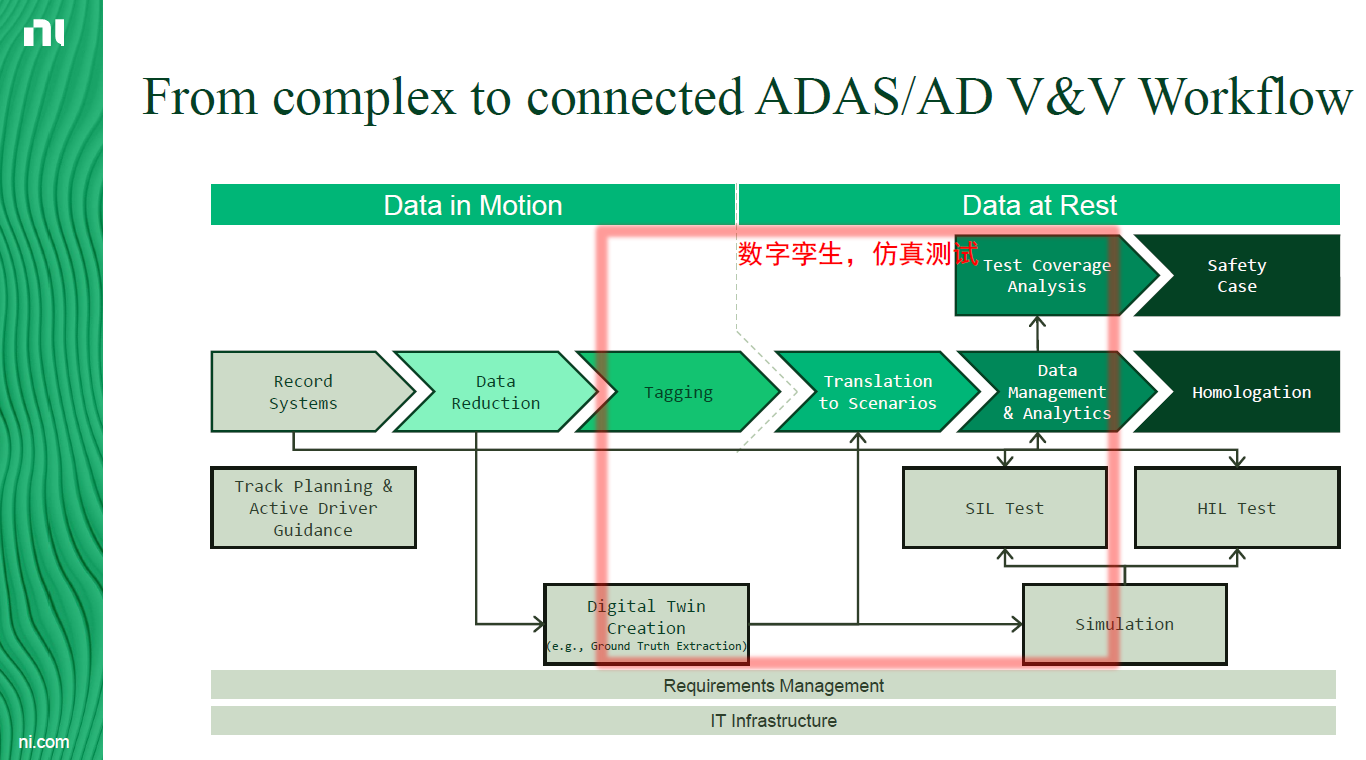
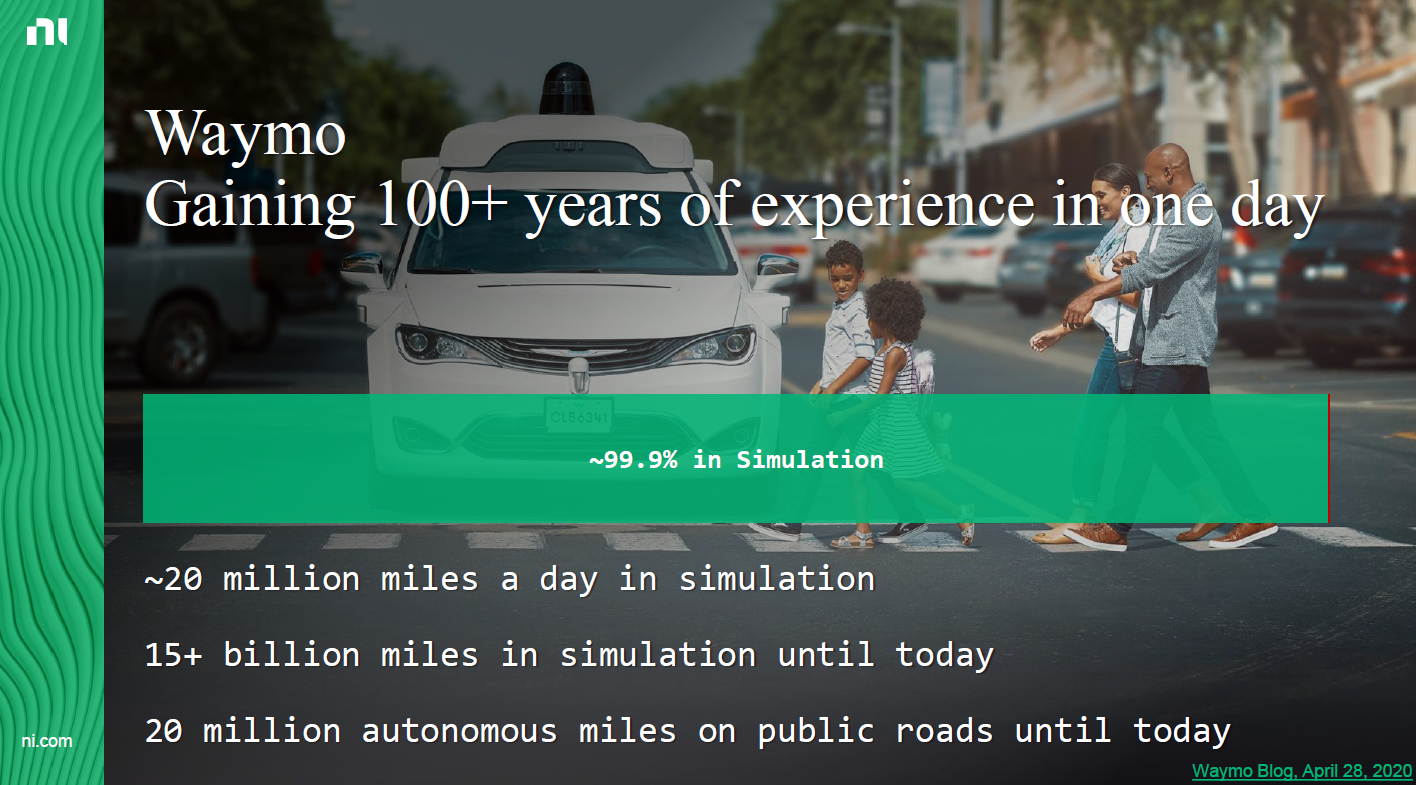
首先来看数字孪生和仿真测试,数字孪生是目前非常火的概念。首先来看谷歌的例子,Waymo一天之内可以跑2000万英里的路程。Waymo是做L4自动化驾驶的公司,它必须要一天之内跑大量的数据,验证它的算法是可靠的。我们不可能花费大量的时间和金钱,用几千辆车去跑,所以99.9%的测试都是通过仿真进行。仿真测试的数据可靠性就非常重要,这也是刚才所提到的挑战,怎么保证数据是真实的,可以跟真实的道路匹配,并且可以给传感器一个真实的反馈?
NI在今年正式宣布收购了monoDrive公司,可以通过monoDrive的数据进行数据重构和孪生。
下图是其效果,上方是在美国奥斯汀实际录制的场景,下方则是通过monoDrive进行的数字孪生,重构为一个非常高保真度的场景。“比如对面来车,可以还原出来,这样可以提高工作效率。因为我们手工去创建这样的场景是非常费时费力,而且还不是真实的道路情况,没有办法还原一个真实的道路情况。monoDrive可以把树叶、栏杆、地面上的标志图形完整地复现出来。目前只有monoDrive这个软件可以做到。”郭堉补充说。
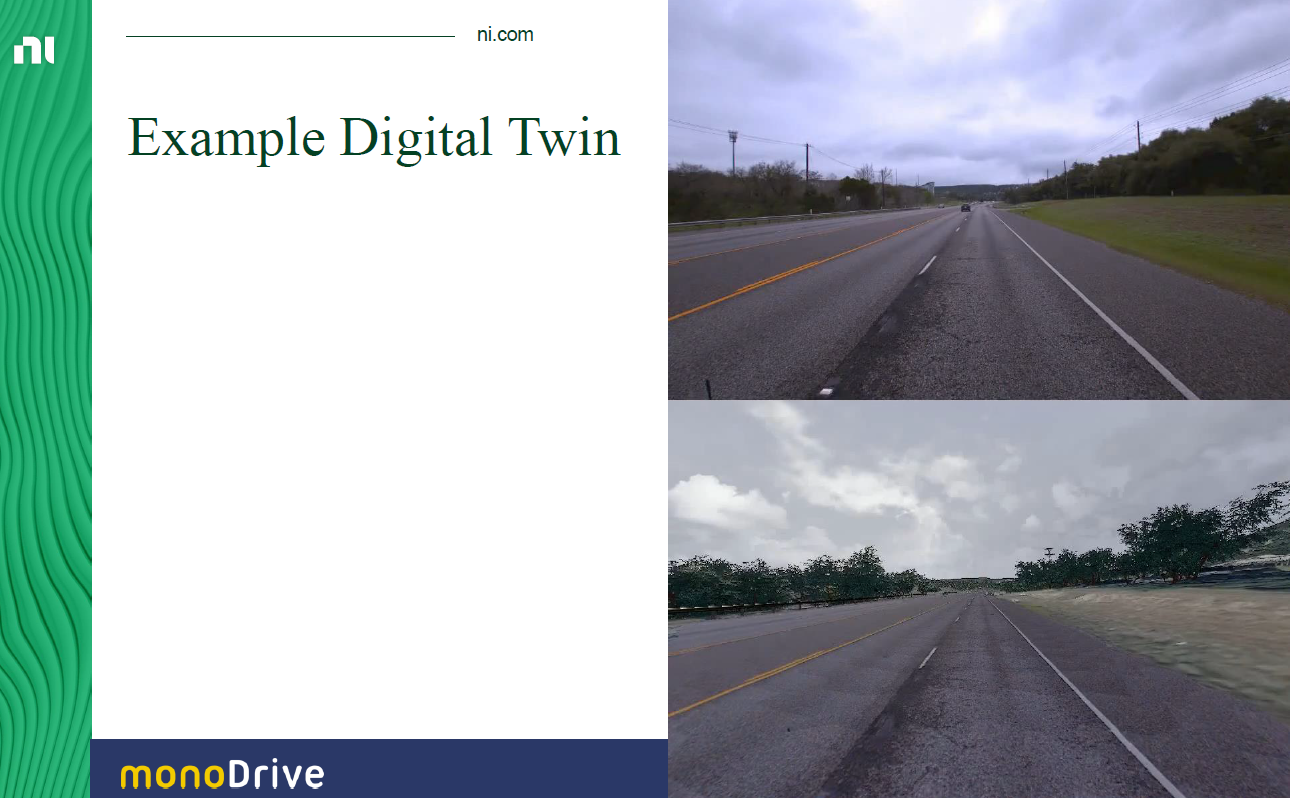
另外不仅是道路的状态,对于天气,monoDrive也可以仿真出来。天气包括路面的一些积水状况,路面的积水状况会影响反射的条件,从而影响到传感器是不是能够完整地体现出来。monoDrive软件就可以强大到把路灯和垃圾筒表面的反射系数都实时地表现出来,甚至日落黄昏。“我们知道,中国的幅员辽阔,每个地方仿真的难度都很大,我们需要这样一个套件,快速地帮助我们创建中国的场景,这样才可以去验证算法,非常快速地迭代ADAS的算法。”郭堉表示,“这也是为什么真实道路的数据非常重要。我们就需要一个高保真度的软件去仿真所有的路面情况,所有折射率,包括所有场景。”
还有道路信息记录。光有仿真不够,还需要用软件平台去做道路实时数据,这是在实车的录制情况下需要用的。“我们知道,目前特斯拉都是用摄像头,但是现在绝大部分OEM厂会有毫米波雷达、激光雷达、超声波雷达等传感器。我们看到,目前很多的算力可以支持12路的摄像头,甚至是高清摄像头,所以对录制的要求会有很多的挑战,其中包括很多硬件接口。只有这些数据都是同步被记录下来,才是真实有效。”郭堉表示。
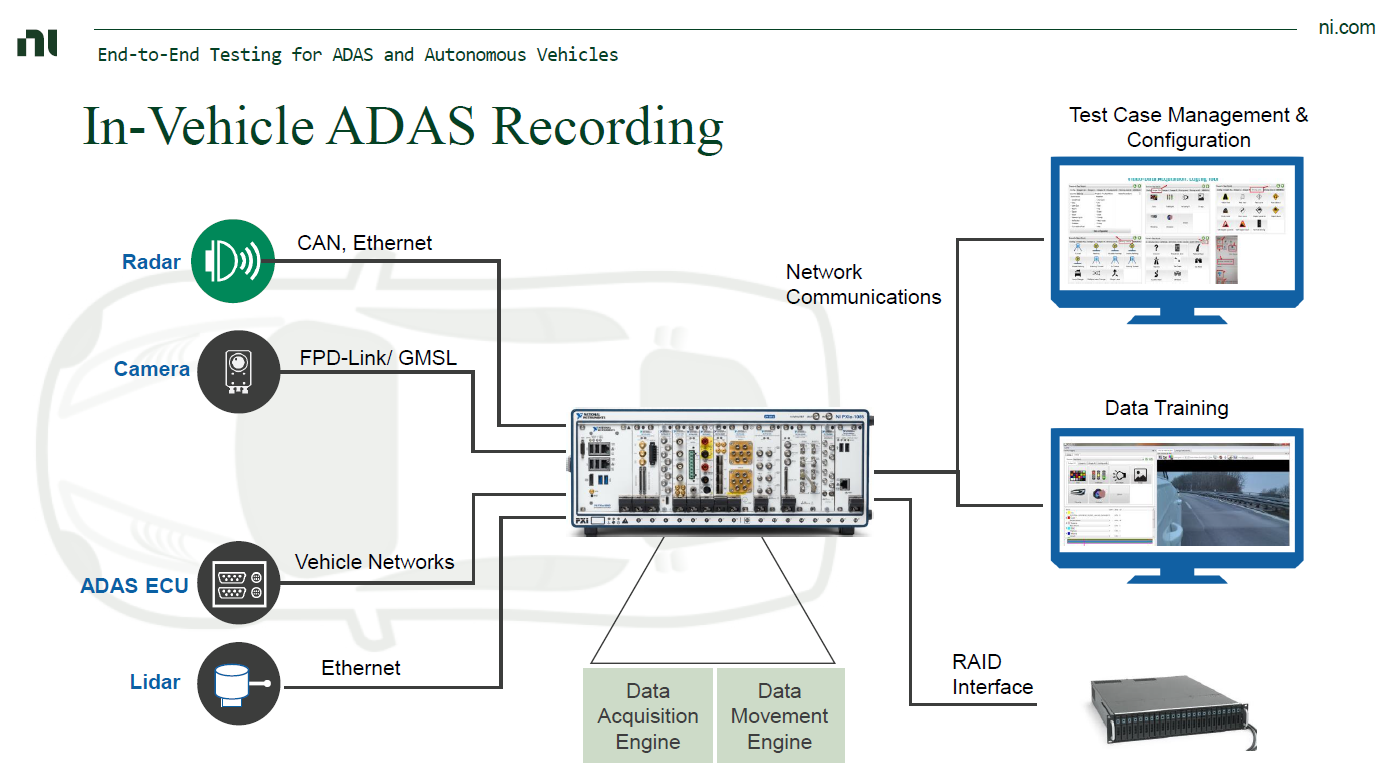
另外我们的数据是非常大量的。NI就提供了PXI这样一个平台,可以把所有数据保存下来,并且支持把大量数据上云端,比如跨国公司的子公司要把数据重复利用,就可以上到微软云等。
PXI硬件平台提供了丰富的接口,不仅是摄像头的接口,还有车载以太网等都涵盖在内。PXI平台可以把所有传感器数据无损地保存下来,也能够进行压缩。还有完整的软件工具链,可以去做数据管理、数据回放。
硬件在环仿真(HIL)也是很多年被客户认可。
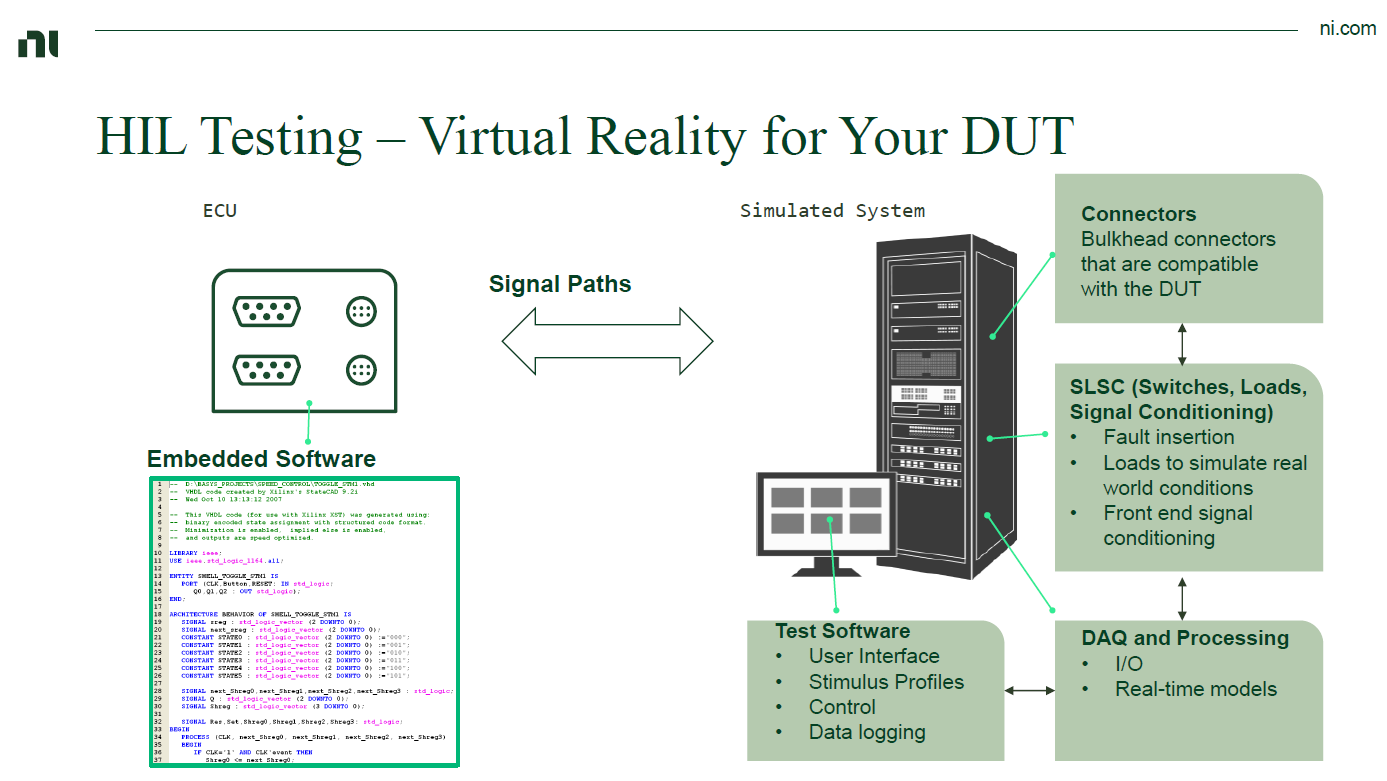
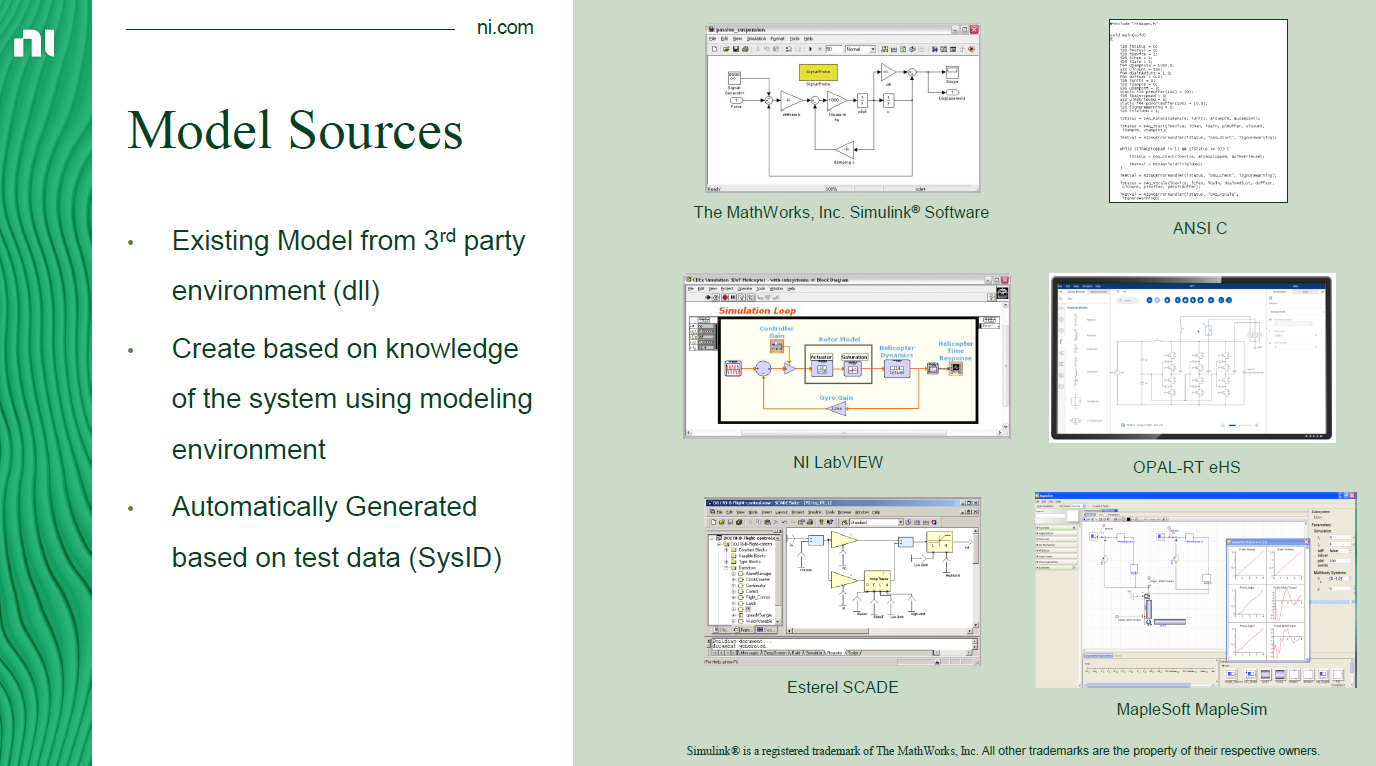
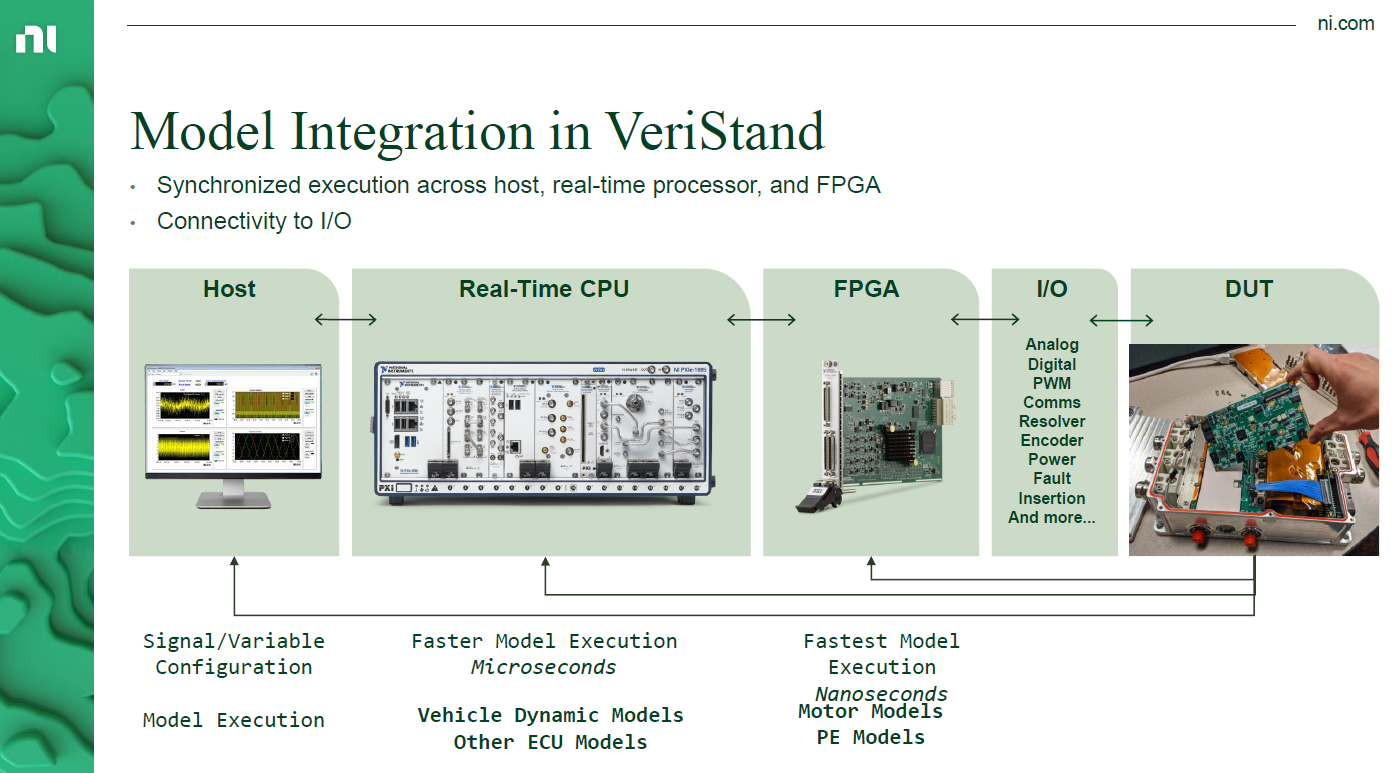
什么是HIL?“我们要测的对象一般都是ECU里的控制部分,或者ECU里面的算法。我们就需要去模仿外围的设备,让ECU以为连接的是真实的电机。比如说可以用软件导入模型,这些模型的来源也是我们非常看中的,用数学的方式去表达。NI就提供了这样一个硬件,包括FPGA的板卡,比如我们的电机模型需要非常快的响应,FPGA板卡就可以提供纳秒级的运算,把模型给部署到FPGA板卡里面。编辑到系统里可以达到毫秒级的运算,就可以跑车辆动力学模型,就可以真实地反馈车辆在虚拟场景中如何运转。接下来连到DUT,这就是用AI完整的链路和平台,包括软件去实现的一个框架。”郭堉介绍道。
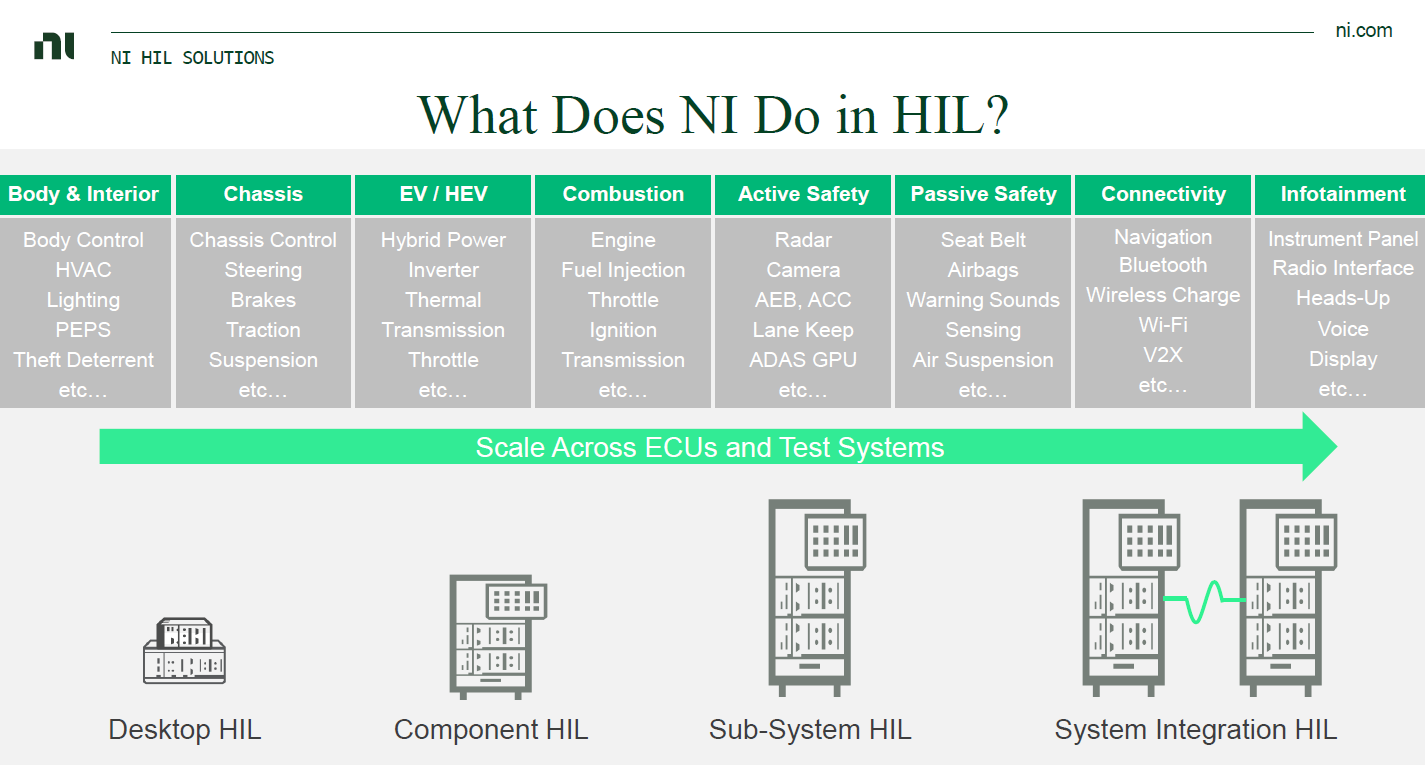
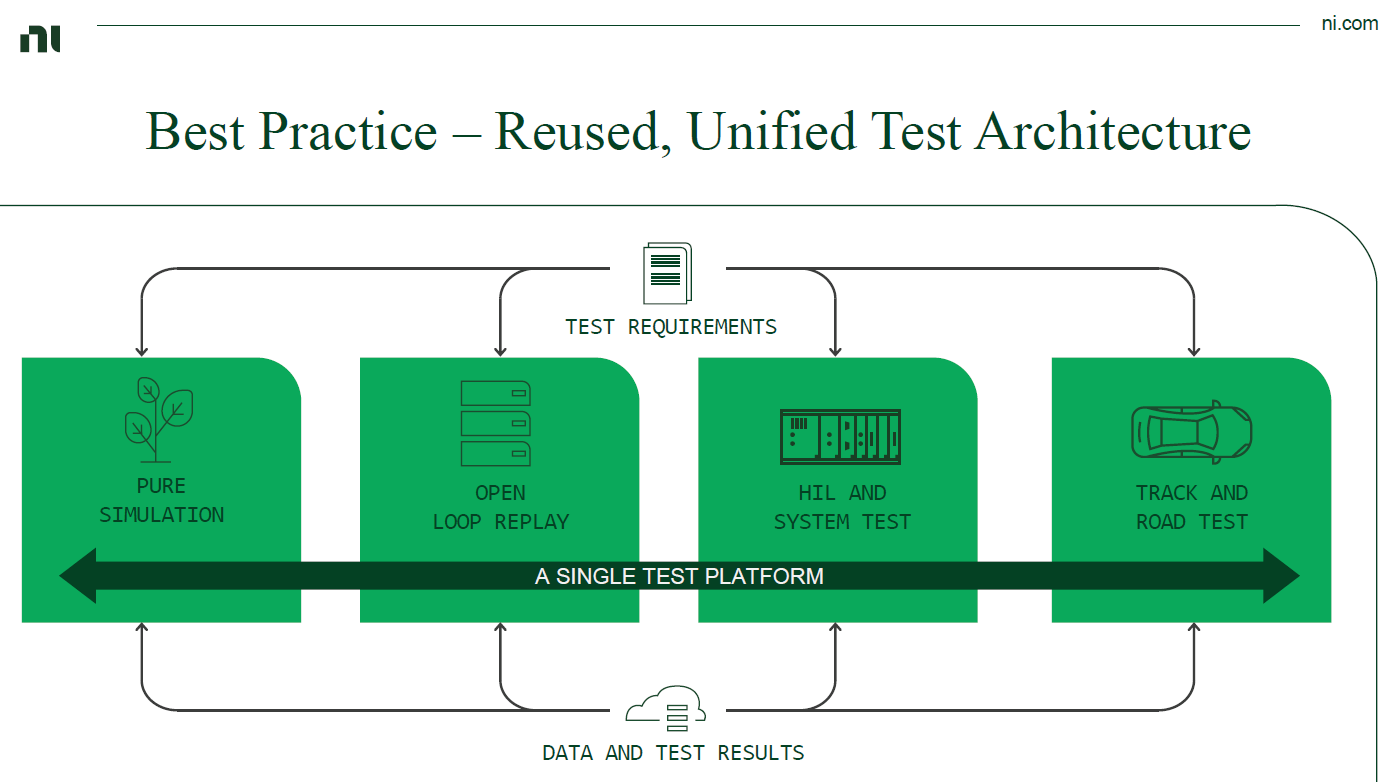
对于今天的主题“用平台化的测试方案去应对无限的自动化驾驶场景”,刚才提到四种道路场景:第一是纯仿真的实验;第二是通过录制下来的数据进行开环的回放;第三是硬件在环的方针;第四是道路测试,把所有传感器数据无损录制下来。所有的这些应用都是基于PXI的平台来做,所以用一个同样的平台,可以实现四大类型的控制。所有的数据也支持上云端,然后帮助客户实现不同的应用。
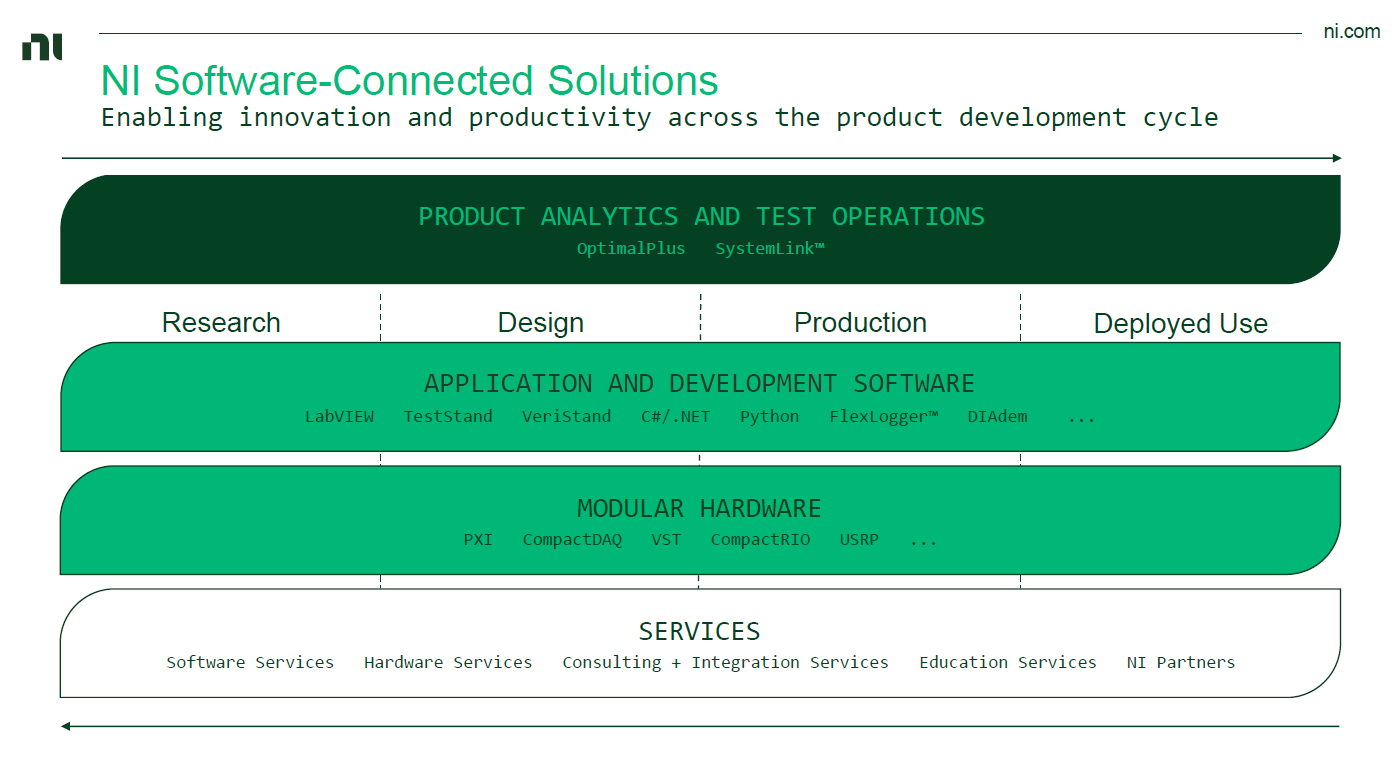
下图是NI产品的大框架。第三层是模块化硬件,就是PXI平台,里面会提供丰富的接口,包括摄像头接口,包括射频的I/O板卡。再上层就是所支持的应用软件。NI的软硬件平台可以做到从研发开始到最后的生产部署,都用同样的工具链去实现。这对于工程师来讲,就不需要去学习各种厂商不同的接口,学习各种厂商的硬件平台怎么操作,去学习新的软件。用NI的平台就可以实现从研发到部署的整个流程。
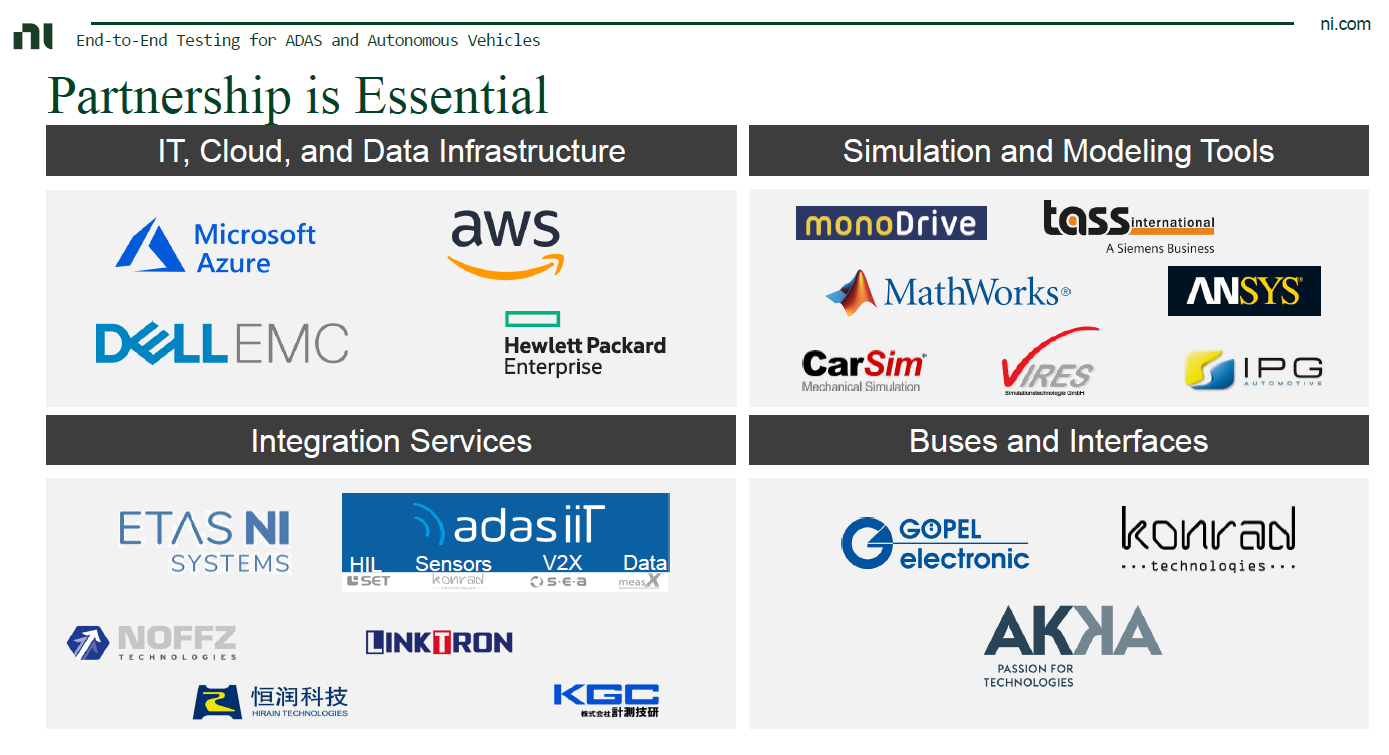
最后来看NI是如何携手生态的合作伙伴,一起应对各种各样的测试挑战。
NI的合作伙伴包括云端的AWS、微软云等等,都会提供相应的接口,有企业级的管理软件。仿真测试端有NI自己收购的monoDrive公司。还有非常丰富的集成伙伴,不管是本土的还是国际的,都可以提供交钥匙方案。
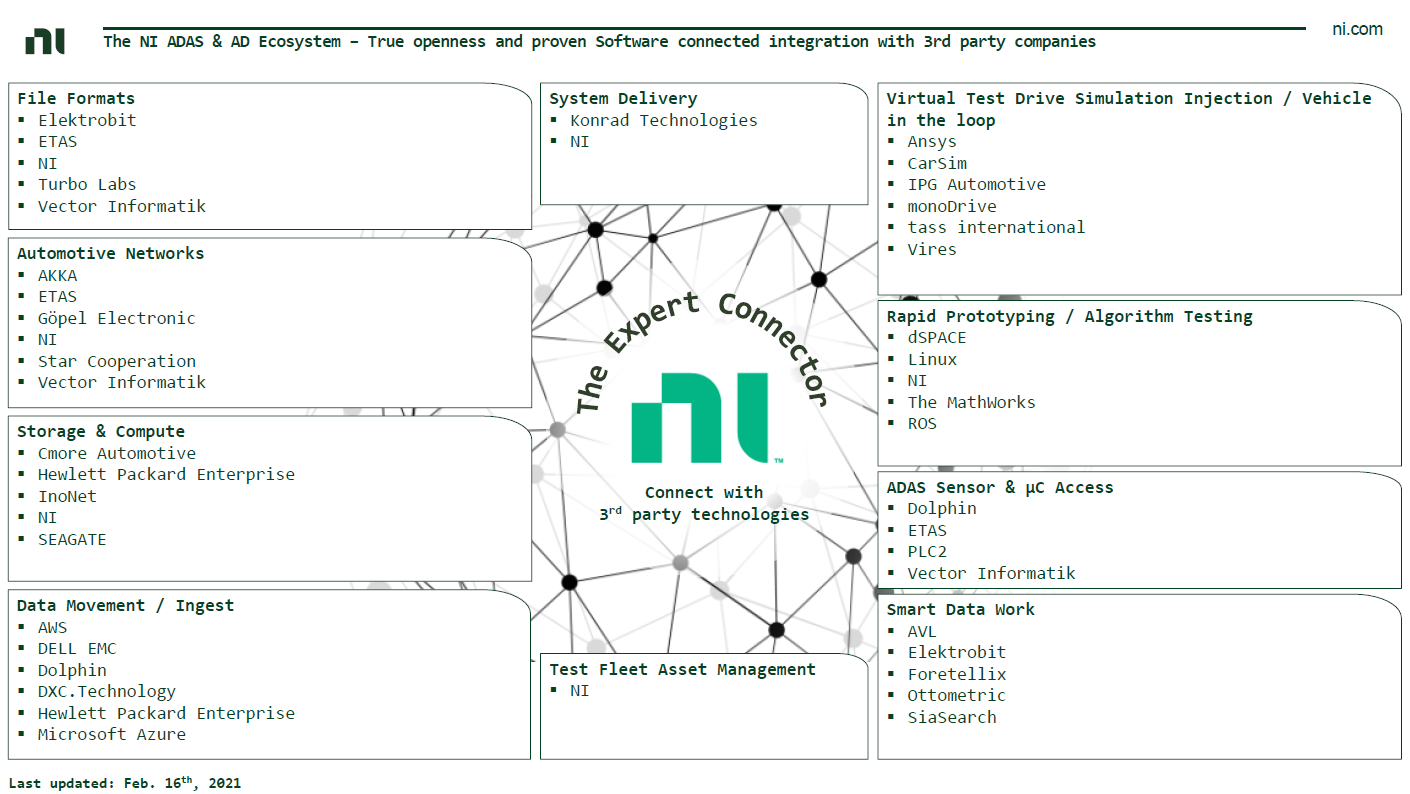
这张图也是NI整个汽车行业的生态链。NI不仅是基于自己的硬件和软件,可以做一些测试,同样会支持友商的接口,所以NI是开放的公司,提供各种丰富的接口。作为连接者,去连接不同友商,不同协议,不同厂商的场景仿真软件,一起携手给客户提供整个交钥匙的方案。
 最前沿的电子设计资讯
最前沿的电子设计资讯

