
自动驾驶车辆(AV)的发展持续吸引交通运输与其他产业领域的大量投资,这些投资是有需要的,因为该领域还有大量棘手的技术问题有待解决。在笔者看来,三大关键问题如下:
接下来笔者将这些问题整理成三张图表,为无论是新手或专家的读者提供一些思考方向。
自驾车的根本问题在于,要开发达到SAE L4、安全可靠的自动驾驶车辆,是极其复杂的任务。图1总结了相关挑战。
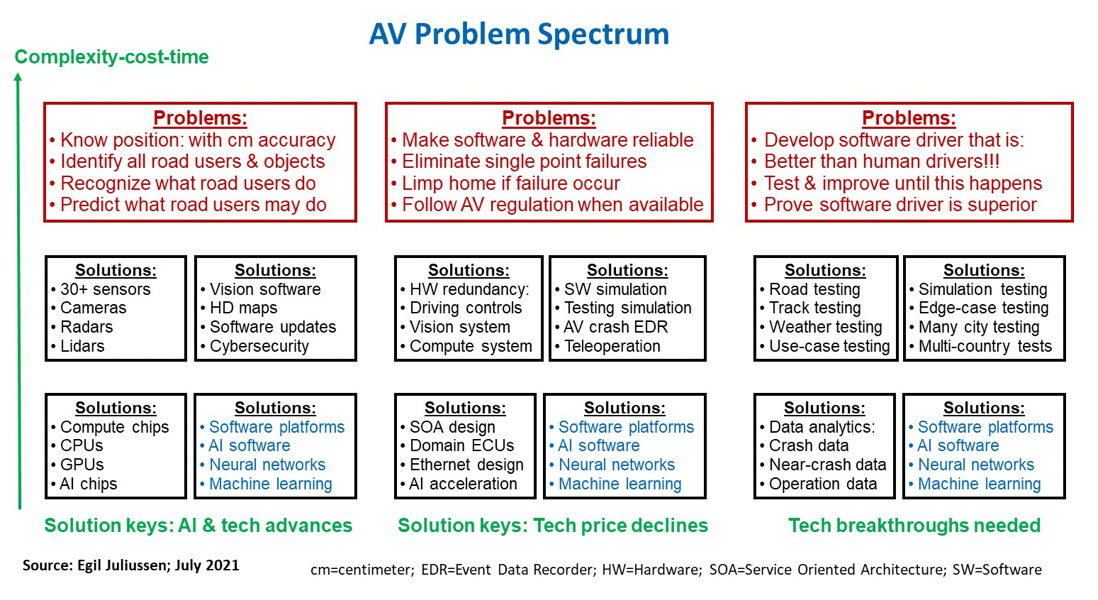
图1:有待克服的自驾车难题。(制图:Egil Juliussen)
图1的红色框将自驾车难题分为三大类,黑色框内是可能的解决方案;每一类难题有四组解决方案。请注意,有三个黑框内以蓝色字标示的内容是相同的,因为这三类问题都需要以软件平台、AI软件(包括机器学习和神经网络)来解决。
第一类难题是,在大多数场景中需要知道自驾车的确切位置,而且精度达公分等级。接下来是对所有用路人与物体进行分类,包括他/它们是什么、或正在做什么,还要预测在接下来的几秒内他们可能会做什么。
解决这类问题需要大量传感器、强大的运算能力以及管理多个复杂系统的平台和AI软件。一辆典型的自驾出租车需要超过30组传感器,包含摄影机、雷达与光达(lidar)。像是美国自驾车业者Zoox (EETT编按:在2020年被Amazon收购)最近发表的自驾出租车内建64组传感器,包括28组摄影机、20组雷达和16组光达。
此外,还需要以AI为基础的视觉软件来处理传感器数据。而大多数自驾车系统都需要高分辨率地图才能准确定位。所有的软、硬件系统都需要全面性的网络安全防护,软件必须以内建的空中下载(OTA)功能定期更新。
第二类难题是确保自驾车软、硬件的可靠度,无单点故障(single-point failures)。即使发生故障,也需要具备「跛行」(limp home)模式,至少能让车辆停靠至路边。而随着自驾车法规问世,安全与操作守则也必须纳入系统和可靠度设计考虑。
还有硬件备援也需要纳入系统设计考虑。自驾车内至少有三套系统需要备援设计:驾驶控制(转向、剎车、加速),视觉传感器(三种类)以及运算。系统架构采用的技术必须能够简化软件平台的协作,并拥有强大的网络安全以及OTA更新功能。
而因为那些系统仍然相当昂贵,大幅降低成本势在必行。幸运的是,芯片技术的发展已经带来显著的成本降低,尤其是自驾车最昂贵的零件:光达。自驾车组件的仿真也至关重要,包括软件、硬件以及所有类型的测试和建模。
还需要自驾车事件数据记录仪,以深入了解事故情况以及能如何改善安全性。远程操控(teleoperation)也逐渐成为自驾车法规中的一项标准,这会是支持自驾车「跛行模式」并解决边缘案例的关键。
第三类难题是开发优于人类驾驶的软件驾驶员。软件驾驶员要比人类驾驶更好到什么程度,目前仍未有定论,但毋庸置疑的是,自驾车开发人员必须持续测试并改善他们的系统。而开发时间将取决于应用案例。
边缘案例测试被广泛应用,这基本上意味着要不断发现软件驾驶员以往未看过、可能不知如何处理的新情况。持续添加新的边缘案例以提升软件驾驶员的能力,被认为或许是目前优先级最高的任务。
要确认自驾车软件驾驶员的表现能优于人类驾驶,也是一个难题。目前我们还不清楚自驾车法规和未来的自驾车类型审查将如何处理这个重要问题。其解决方案主要涉及测试、分析大量测试数据,以辨别软件驾驶员的弱点,然后进行更多测试。
幸运的是,这种测试大多数都能够以软件仿真来进行,效率远高于道路测试──软件仿真每日测试里程数最高可达到道路测试的100倍。软件仿真测试侧重于边缘案例与类似场景的测试。而自驾车测试也必须涵盖不同的天气和光线条件,但过去大多数自驾车测试都是在理想天气条件下进行的;因此,我们需要更多仿真真实世界的软件测试。
前面讨论的自驾车复杂性会因为应用案例的不同而有很大差异,自驾车复杂性主要取决于驾驶的复杂性。图2是自驾车应用案例复杂性的综览,聚焦于SAE L4自动驾驶车辆的部署。而这些场景的各种变化情况不包括在内。
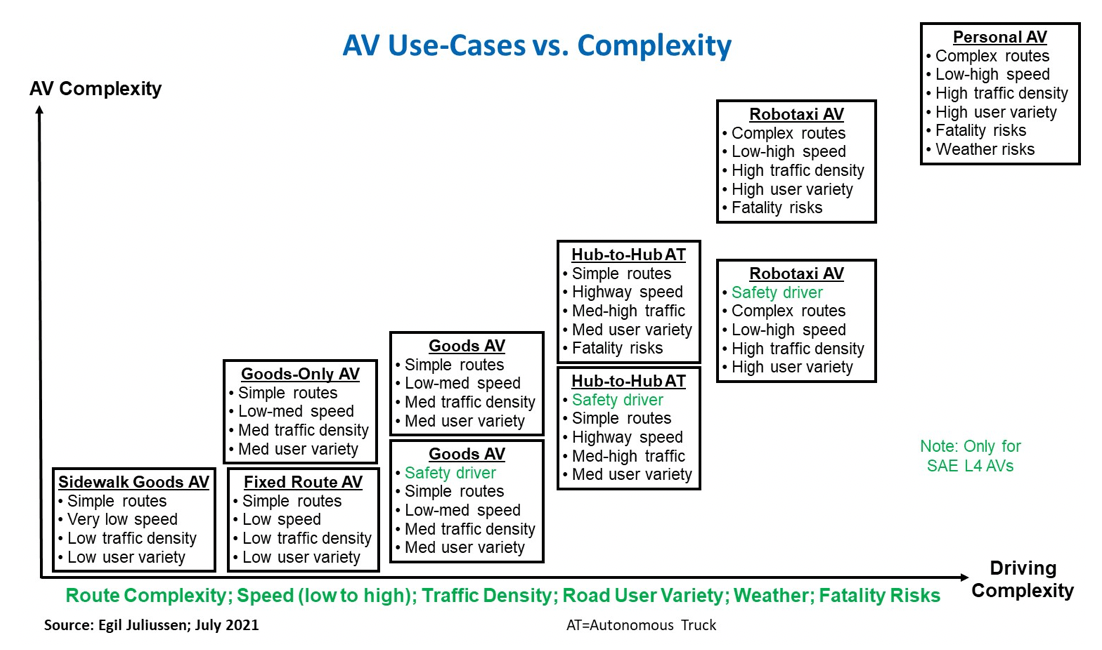
图2:自驾车应用案例与相对应的复杂性。(制图:Egil Juliussen)
图2以二维图显示各种自驾车应用案例与相对应的复杂度,y轴越往上代表自驾车复杂性越高,x轴越往右则是驾驶复杂性越高。驾驶复杂性包括路线障碍、驾驶速度、交通流量密度、道路用户的多样性(汽车、自行车、行人等)和天气条件。图中同时列出了发生致命事故的风险,这主要取决于车速,部分自驾车应用案例发生致命事故的风险极低。
低自驾车复杂性是指路线简单、车速低、使用者或交通状况的多样性较低。最简单的等级是自驾车仅在封闭场域内行驶,例如校园、办公园区或军事基地。路侧货运自驾车目前跑得最快,有多家厂商投入,其中美国公司Starship是领导业者,在2021年5月已经累积超过150万次送货,很快将超越200万次。
固定路线自驾车的复杂性也较低,因此这个利基市场也吸引多家业者参与。这类自驾车由于价格高昂而部署缓慢,但也已在数百个城市进行测试中,其应用包括复杂性低的巴士路线,或是封闭式的行驶环境。
固定路线自驾车也可以应用于弹性化的路线,例如支持随选接送服务;在2021年7月公布的ISO 22737低速自动驾驶(Low-speed autonomous driving,LSAD)法规应该会对固定路线自驾车部署带来正面影响。
仅用于「最后一哩」货物递送的货运自驾车,所面临的交通复杂性更高;这类自驾车的行驶速度高于路侧货运自驾车,可以用面包车和小型卡车改装。目前这类自驾车正以配备安全驾驶员的模式进行测试。
这个类别涵盖多种自驾车场景,没有配备安全驾驶员的低速货运自驾车也属于这一类;在集货点间(Hub-to-hub)行驶的自动驾驶卡车也可以算在这一类,但目前还需要安全驾驶员。该类别也称为中程(相对于长途)卡车运输。
在没有安全驾驶员的情况下,可以透过远程操控集货点间自动驾驶卡车和自驾出租车。大多数自驾车法规都要求具备远程操控能力,当自驾车卡在路上,远程操控可以作为管理自驾车的最后手段。远程操控也可能成为更普遍的技术,最终取代安全驾驶员。
图2还包含了三种具高复杂性的自驾车应用案例。集货点间自驾卡车的应用案例是该类别中复杂性最低的,其次为自驾出租车。仍在开发阶段的私人自驾车也被归类为高复杂性。私人自驾车可能从跨城区部署的自驾出租车中获取经验。
自驾车的部署将从简单转向复杂。图3对图2所示的自驾车应用案例图稍作了修改,以x轴来表示时间线,并重新排列了应用案例方框,使其位于时间线的不同位置,表明何时将会出现有实际意义的应用。
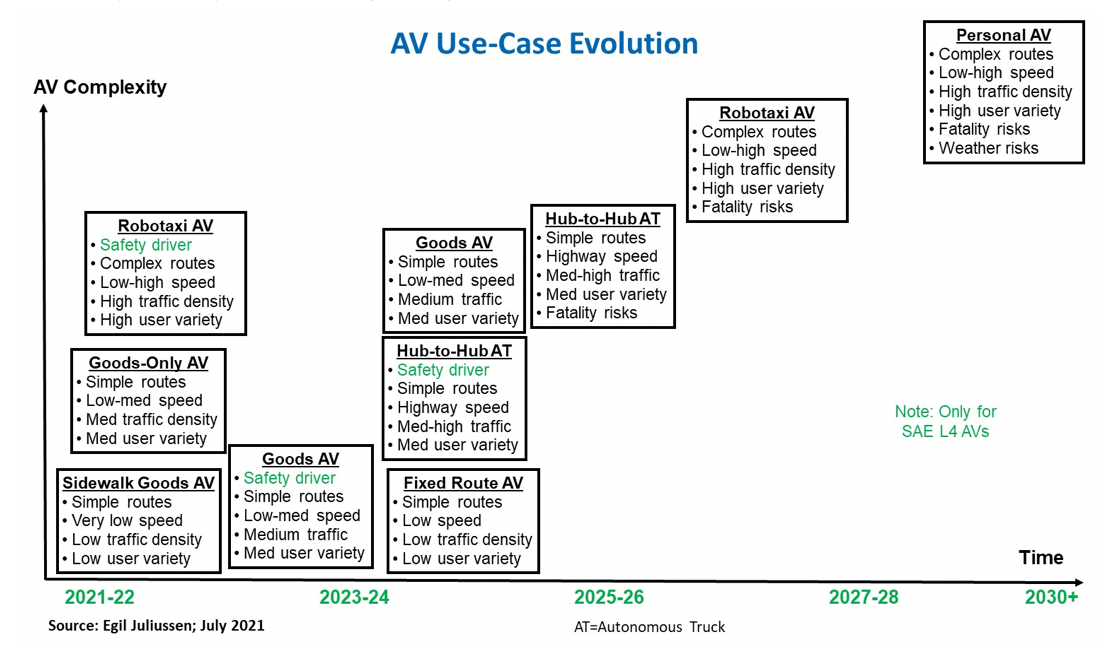
图3:自驾车应用案例演进。(制图:Egil Juliussen)
在这种情况下,路侧货运自驾车的部署率最高,在许多城市中应用于送餐、送杂货以及其他小型包裹。由于采用的传感器较少、重量较轻,且以行人速度行驶,路侧货运自驾车成为最便宜的货运自驾车,它与人或其他物体发生碰撞的风险也相对较低。
纯货运自驾车以Nuro的无人驾驶货运车为代表,目前仍主要处于测试阶段;从该公司的宣传来看,他们可能更广泛部署这种无人驾驶货运车。配备安全驾驶员的货运自驾车也能在商店或仓库间提供最后一哩或中程货运。配备安全驾驶员的集货点间自驾卡车正在进行越来越多的测试,其中大部分是为付费客户运送货物。
而自驾出租车目前大多数仍处于测试阶段,并配备安全驾驶员。不过Waymo在美国亚历桑纳州凤凰城区域的大部分测试都撤下了安全驾驶员,有几家自驾出租车营运商甚至已获准在美国和中国的一些城市为所提供的服务收费。
固定路线自驾车业者如EasyMile、Local Motors和Navya等,已在多个国家/地区进行了大规模测试。但新冠病毒疫情始得专注于每趟最大乘客数达12名的大多数测试停摆,最新的ISO LSAD法规涵盖了该类案例,预计在接下来几年启动固定路线自驾车的实际应用。
其他类别的自驾车应用案例部署要困难很多,而且将会比图3中显示的时间更晚。集货点间自驾卡车可能会在2025年左右投入应用。自驾出租车的大量部署会在几年之后,部份自驾出租车业者表示,会在少数城市提供服务。私人自驾车应用则将明显晚于自驾出租车。
自驾车技术仍然存在很多难题,但部分应用案例的复杂性较低,可以进行有限部署。针对较单纯自驾车场景的相关法规正陆续问世,众多厂商最终都将提供法规核准的服务。所有自驾车法规都会要求远程操控功能,该功能也可取代安全驾驶员,让某些应用案例更早部署。
目前导致自驾车系统价格高昂的主因是光达,该技术成本在接下来五年可望迅速下降,这意味着在2025年之后,自驾车系统的成本也将大幅降低。而复杂自驾车系统能否早日部署,最终取决于AI技术的突破,但这是无法预测的;如果相关的创新发生,或许不必等到2030年就可以看到私人自驾车。
(参考原文:AV Complexity Explained,by Gary Hilson;本文同步刊登于《电子工程专辑》杂志2021年9月号;责编:Demi)
 最前沿的电子设计资讯
最前沿的电子设计资讯
