
EDN小编的国庆节吃喝玩乐胖三斤,而别人的国庆节却造了个钢铁侠的机械臂!
日前,华为天才少年@稚晖君 继把自行车做成了自动驾驶之后,终于更新了,这次他硬生生造了一台钢铁侠的机械臂!
据视频介绍,半年前,他淘来一个生产于2014年的二手机械臂,但是他不太满意,所以稚晖君一不满,大家就有视频看了!
据说这是他迄今为止搞的项目中,最复杂的一次(耗时4个月)。
机械臂的名字也非常有趣——叫做Dummy。
这次稚晖君的项目,操作系统和 AI 计算平台也分别都用上了华为鸿蒙和昇腾 Atlas 处理器,成本控制在一万块。
视频中,彭志辉远程为一颗破口葡萄缝针,葡萄未被机械臂损坏。

在“葡萄缝合术”后,原本裂开小口的它,变成了这个样子:

稚晖君称机械臂可以完成很多人手无法达到的效果,比如运用软件去抖、运动范围的重映射、例句强增强等,更重要的是,以上所有过程,可以在厕所远程、实时完成!

虽然视频只有16分钟,但稚晖君表示,为了造出这台机械臂整整花了4个月时间,经历了150个版本的修改。
这台机械臂属于小型高精度6轴机械臂。
机械臂的打造主要分为四大部分:机械臂设计、闭环伺服、控制器和空间定位装置,分别对应机器人的躯干、心脏、小脑和眼睛。
机械臂设计,指机械臂的“躯干”,让机械臂能稳定运动的必要步骤,包括机械分析、外观设计(3D建模)、选材等。

为了确保稳定+便宜美观,最后的机械臂主体采用了铝CNC(数控)加工(确保稳定),装饰再采用3D打印进行制作(节省成本)。
其中,CNC部分是稚晖君拜托“家里有厂”的UP主@XIKII拆机狂魔你西哥 帮忙制作的,全部的8个金属件一共耗时半个月:

最后的外观设计出来是这样的:

闭环伺服,也就是机械臂的“心脏”,用来提供让机械臂干活的动力。
具体来说,软件上包括FOC算法、绝对值编码器&PID算法,CAN总线通信协议等部分,硬件上,除了电机等材料的选用,还包括散热等细节。
通常来说,机械臂会采用无刷伺服电机,但这里它的体积确实比较大。
由于稚晖君想做比较小巧的机械臂,所以最后采用了步进电机,搭配0背隙谐波减速器,单个驱动效果做出来是这个样子的:

既然是6轴,最后整体采用了6个步进电机+6个谐波减速器,搭配软件设计构成了机械臂的“心脏”。
控制器,指机械臂的“小脑”,用来操控机械臂的动作、来实现各种功能。
除了原理上需要掌握运动学、动力学分析以外,在软硬件上还需要掌握电路设计、通信和电源管理等额外的“斜杠”技能。
据稚晖君介绍,光是微控制单元(MCU),这台机械臂上就多达12个。
其中,主控制器(采用冗余设计)和电机伺服驱动器(支持CAN总线&功率机联)的设计如下:

至于电路设计,也比想象中要更加复杂,毕竟要想达到上述“多控制”功能的话,除了命令行控制以外,蓝牙、无线通信的相关软硬件也需要进行考虑。
没错,除了有线控制以外,蓝牙、WiFi、2.4G同样能控制这台机械臂~

最后就是空间定位装置了,也就是机械臂的“眼睛”,用来让机械臂“看见”、并操作需要完成的任务。
这里面包括我们常见的双目视觉算法、AHRS系统和力传感系统等,都在这一步完成。
稚晖君设计的机械臂并非只能做“输入任务并完成”的简单操作,而是一台真正能够从多个角度接收任务、并实时处理的“智能机械手”。
简单来说,就是用双目视觉算法识别,再用AI算法实现姿态估计之类的操作:

搭载到机械臂上后,“手子”就能根据人的动作,完成一系列复杂的操作(控制器改自PS5手柄):

当然,经过软件去抖、运动范围重映射、力矩强增强等操作后,机械臂能完成比手精度更高的操作(手抖玩家福音)。
最后,就是将这几部分的软件算法和硬件组装起来,进行调试:

最后的成品效果是这样的:

就这样,稚晖君把一台二手且完全不够智能的机械臂变成了一个全新的、附加各种智能功能的新产品。
值得一提的是,稚晖君称这些项目表现上看起来是机械和电子,其实背后全是算法和数学。

@稚晖君 称大部分资料会开源,不过因为资料库很庞大需要整理一阵子,开源的链接是他的GitHub仓库:https://github.com/peng-zhihui/Dummy-Robot
@稻田里的萤火虫:我在TUB读研究生,我教授是在西门子和MTU供职的,今天我和他休息的时候一起看了这个视频,他很想邀请这个博主去西门子看看,我说他已经是华为的了,我教授说,又是华为!
@平凡de土猫:他缝葡萄时候我已经开始震惊了,再说用的鸿蒙,都快哭了。医疗行业里,各种高端设备,大多是外国垄断。CT,MRI,腹腔镜,更别说达芬奇机器人这种了,看了他之后觉得我们可能有朝一日能用上华为国产。
@张宇考数研学:拆掉都够我们一个院当毕设。
@张杰伊jay :我现在理解了“十个普通工程师也比不上一个天才工程师。”
在视频走红后,稚晖君本人也在知乎上进行了回应。
他在回应中提到,这个项目和华为没有任何关系,但“领导看到还挺高兴的,还问需不需要报销一下制作费用”。
针对机械臂的技术水平,他也作出说明:“虽然付出了不少心血,但达芬奇的高精度、多自由度、低延迟通信等等这些方面都不是一个DIY项目能企及的。”
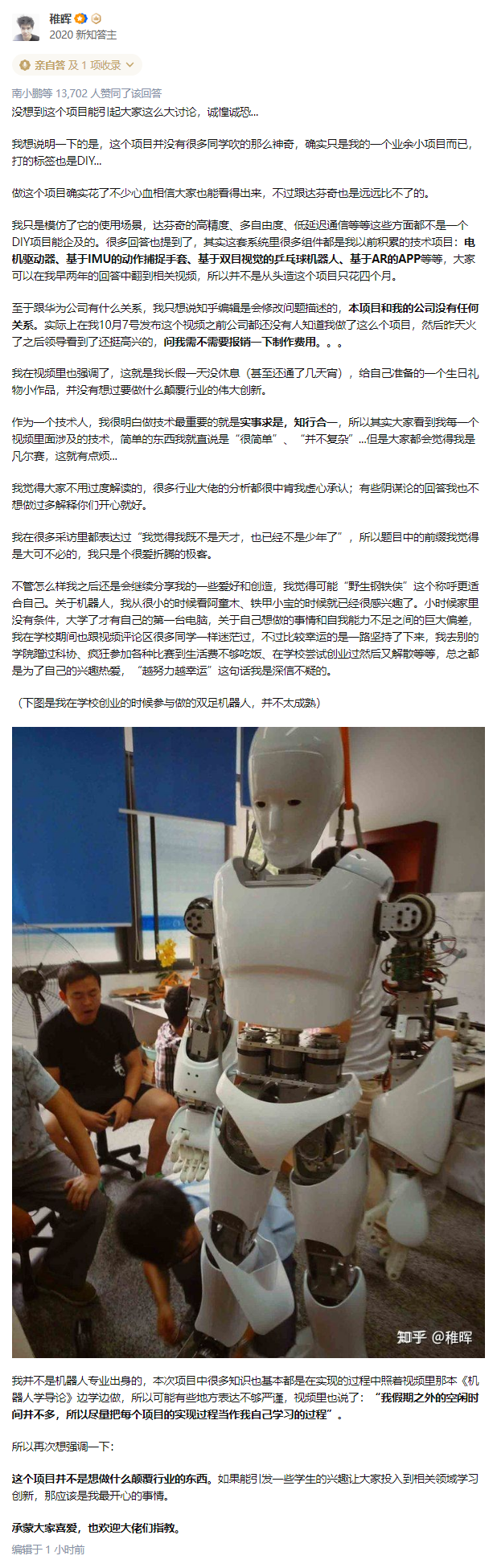
稚晖君还谦和地表示,自己在很多采访里都表达过“我觉得我既不是天才,也已经不是少年了”,自己只是个很爱折腾的极客。而这套系统里很多组件都是以前积累的技术项目,并不是从头制造这个项目只花了四个月。
稚晖君称,项目中使用了OpenHarmony,包括3D结构设计文档在内大部分资料会开源,不过因为资料库很庞大需要整理一阵子,开源的链接是他的GitHub仓库:https://github.com/peng-zhihui/Dummy-Robot
最后,有兴趣的朋友可以直接观看视频:
责编:Demi
 最前沿的电子设计资讯
最前沿的电子设计资讯
