
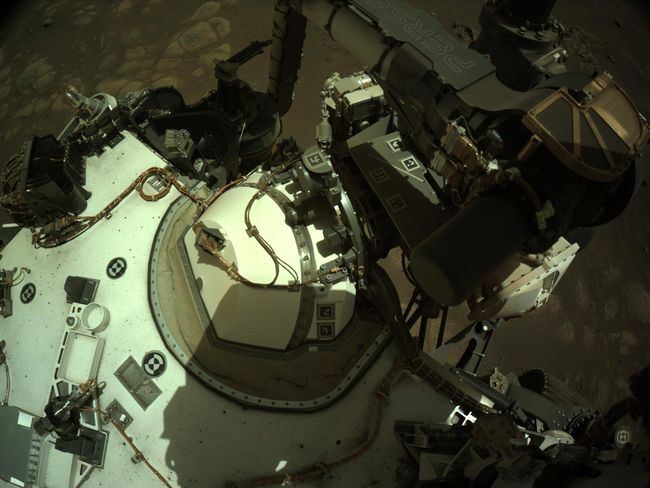
每次我们在火星上采集岩石样本时,毅力号都要用它的机械臂、取心钻和自适应缓存组件进行一套长达数小时的精心编排的操作。其中一项操作是对接:机械臂与火星车前部的钻头转盘对齐的过程,以便取芯器能够放下和拿起新的钻头。
对接在样品采集过程中会发生两次。
首先,机器人手臂对接以放下当前被卡住的磨蚀的钻头,并拿起一个带有空样品管的取芯钻头。
然后,在收集完岩石样品后,它再次对接,放下带着现在装满的样品管的取芯钻头,这些样品将被处理、密封,并由贮藏组件储存。
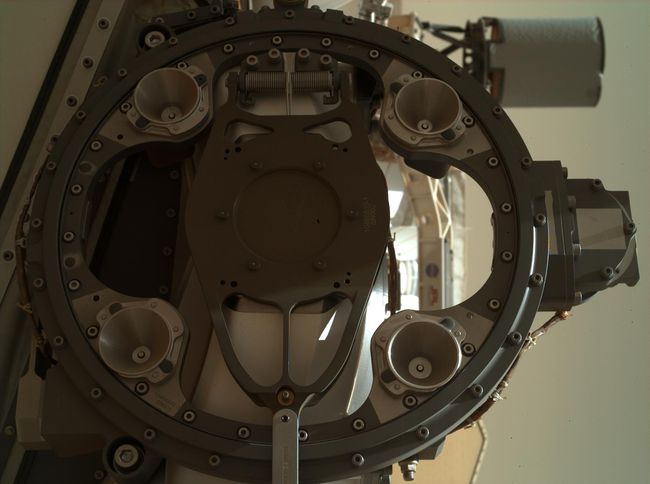
“毅力号”上的WATSON相机拍摄的机器臂图像。在获取这张图片时,位子旋转器前面的一扇门仍然关闭,后来被打开了。
对接的工作原理是将机械臂末端的一组小柱子引导到底座上的一组相匹配的锥体中。
想象一下将充电器插入手机或电脑--即使你不去想它,你也很依赖你的手和指尖的触觉反馈,来感觉你是否需要将插头滑向一边,从而将它对得更准,并知道它何时到达底部。机械臂对接的工作方式也是如此,机械臂末端的力传感器告诉Perseverance它在多大程度上用力,以及在哪些方向上用力,Perseverance使用这些数据来引导机械臂到位,并确定对接完成的时间。对接还包括每个锥体底部的微动开关,当机械臂快对接时就会按下这些开关,作为额外的验证。
一旦柱子到达锥体的底部,机械臂就会以几乎650N(146磅)的力量用力推入对接,以确保它在比特交换期间保持对接状态。
我在JPL的6年职业生涯中,大部分时间都在从事对接工作,我的目标是使其可靠和简单--就像充电头插入你的手机。
达到这一点需要大量的设计和测试(包括在地球上的各种测试平台上对接近2000次),并且很荣幸地看到对接已经在火星上多次成功发生。
每次我们收集样本时,我总是有点紧张,但我的手指会交叉在一起,希望有更多成功和轻松的对接尝试。
责编:Demi
 最前沿的电子设计资讯
最前沿的电子设计资讯
