
汽车行业目前面临着重大挑战。一方面,车辆管理平台的种类正迅速增多,对可扩展性和模块化开发的要求也随之水涨船高。另一方面,部分或全自动驾驶以及“联网汽车”的发展趋势,要求融入新功能,并构建更强大的车载ECU网络。而E/E架构的复杂性不断增加,对通信技术的要求也随之提高。
以太网通信功能作为目前正在开发的众多车辆管理平台的一个重要组成部分,是实现高度可扩展的面向服务的车辆架构的前提。此外,CAN、FlexRay和LIN等经典总线系统仍然是架构的重要组成部分。对于这些不同总线系统之间的通信,可以利用集中网关功能,也可通过跨不同域控制单元的分布式网关功能来实现。
对于此类系统的开发,支持不同通信系统交互的硬件平台已经可以在项目早期阶段提供有价值的帮助。英飞凌汽车网关评估板就是这样的平台,支持多种不同的网络接口。它具有多个Realtek以太网接口。两款新一代AURIX™ TC397微控制器具备十分强大的计算能力。这样就能在传统网络与汽车以太网之间实现强大的连接 。
如今,习惯上将车辆划分为多个功能域(如动力总成、安全、车身、信息娱乐、底盘、驾驶辅助等),这些功能域通常独立运行,并通过独立的总线系统相互联网。对于这些域之间的数据交换,需要利用一些通常称为网关的功能来完成。网关可以是一个独立的ECU,也可以是功能单元的一个组成部分。 REF _Ref16091481 \h \* MERGEFORMAT VALUE 图1 显示这种架构的一个示例。
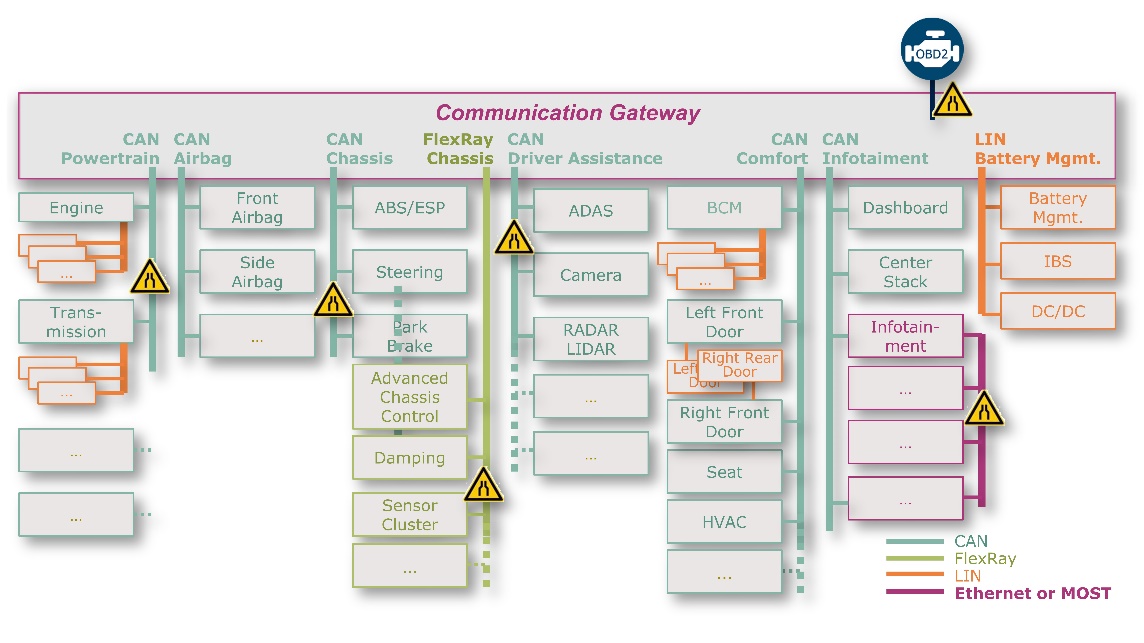
图1:面向功能的经典车辆架构
车制造商的内部组织结构通常按照这种功能分类,这有助于域内功能的开发。不过,这种体系结构存在劣势,特别是在域之间的交互方面。此外,在向ECU分配功能方面,该结构过于僵化,缺少灵活性。新功能通常需要自己的ECU;汽车供应商通常会开发软硬件结合的黑盒式解决方案。这种结构将限制一个高冗余系统的模块化和可扩展化。
不过,功能复杂性的日益增加,要求更强大的功能联网、更高的可扩展性和新功能的快速实施。因而,可扩展的分层结构能更好地契合这些需求。 REF _Ref16091643 \h \* MERGEFORMAT VALUE 图2 显示这种变化的原理。
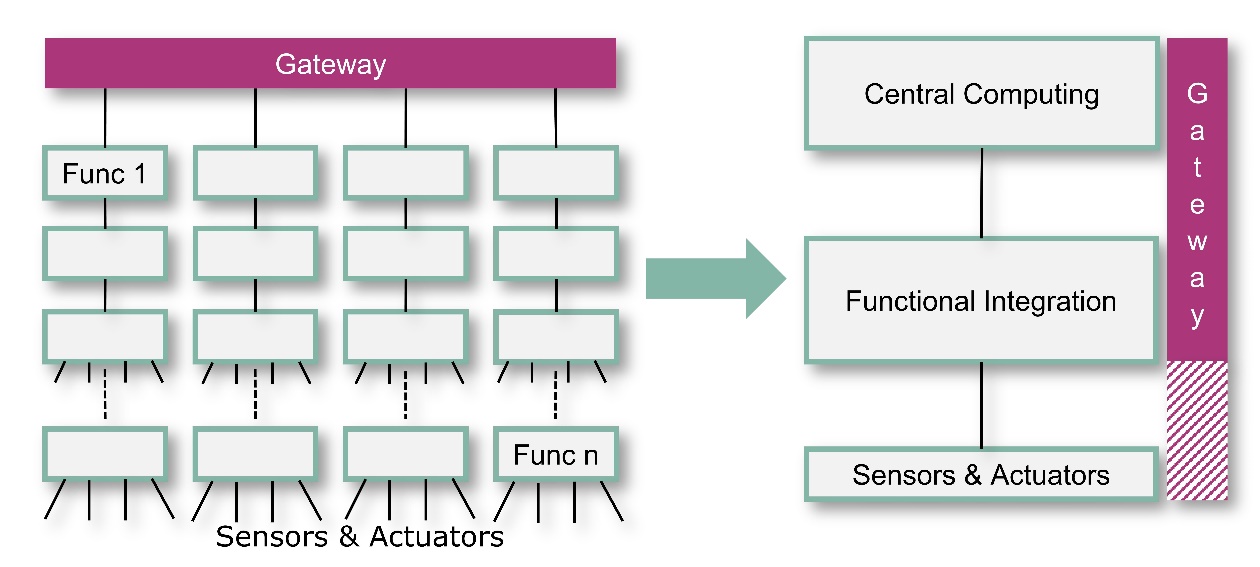
图2:向可扩展、分层结构的架构转变
这一架构演进的第一步已经在面向新的车辆管理平台进行开发。将车辆划分为多个域的做法仍将保留,但现在支持更集中的计算能力。强大的域控制器集成许多功能,所需的计算能力显著提高。一些制造商将通过层级结构中额外的ECU来组合诸多功能。在这种架构的较低层级,ECU结构不会发生如此根本变化。制造商标准ECU可用于此方法;车辆的更新程度仍是可控的。 REF _Ref16091764 \h \* MERGEFORMAT VALUE 图3 显示这种架构的一个示例。
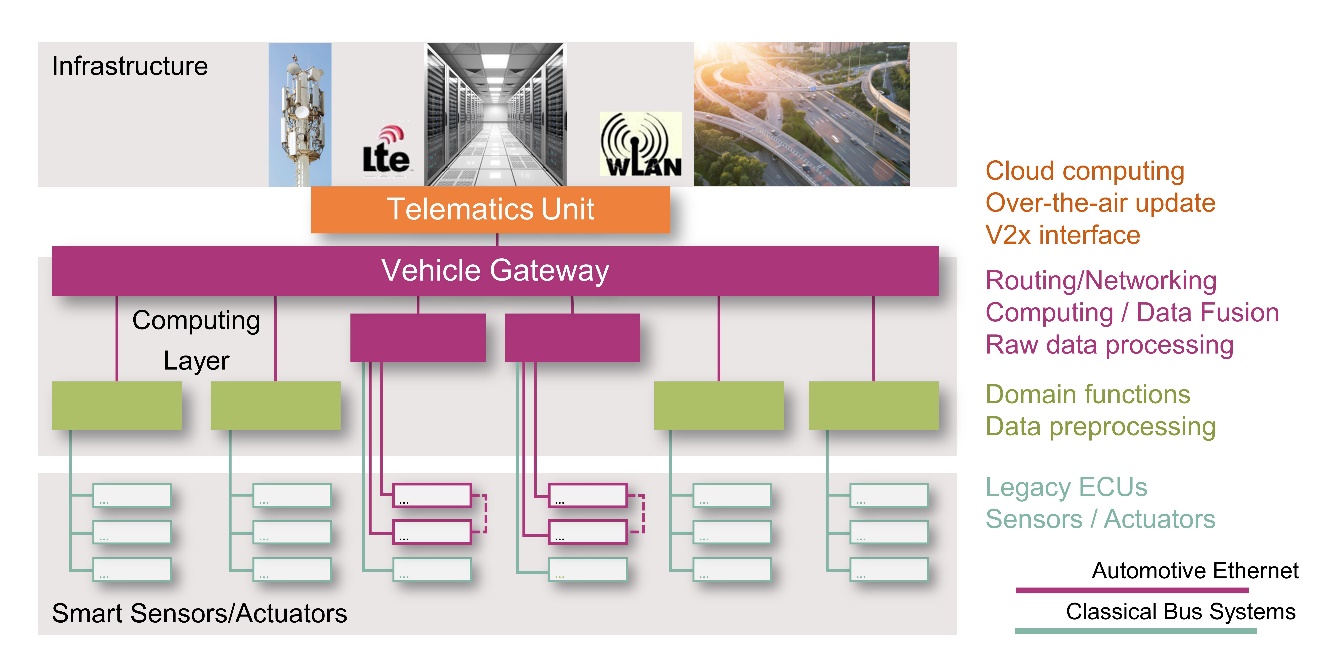
图3:结合域控制器的可扩展架构
中央网关充当域之间的接口以及用于连接外部世界的“连接网关”。另外,在计算层,图中所示的域控制器也需要网关功能。
关于架构的下一步演变正在讨论中,这要求对车辆制造商的内部组织结构进行更彻底的变革和可能性调整。区域的定义是,区域会根据功能在车辆中的位置对其进行组合。不再将区域控制单元固定分配给原始域;这样的ECU可能会在一个盒子中涵盖各种功能。博世于2016年提出了该架构的基本理念。一些着手研究其实施应用的汽车制造商正在开展相关项目。第一个实施项目可回溯到2019年2月 [2]。这种方法的主要优点是显著减少了布线工作量,这对线束的重量和成本都有积极影响。不过,引入这种架构的开发工作量要大得多;我们预计,在下个十年中期之前主要汽车制造商不会实施。
朝着由区域界定的通信结构迈进的上述演变进程都预先假定:数据在车辆内高速分布和传输[2]。许多应用需要确定性行为,即可预测的延迟。汽车以太网带来一种可能的解决方案。通过100Base-T1和1000Base-T1的低成本双绞线进行以据传输,可实现快速的数据传输。针对确定性行为,以太网提供了多种TSN(时间敏感型网络)标准。对于TSN协议的应用也带来了一些挑战;目前尚不清楚车辆制造商将使用哪种相应的标准。多数情况下,这些标准要求结合软硬件解决方案来实现时间受控的、确定性数据传输。为保证整个车辆网络中的确定性数据传输,所有ECU都需要具备这一功能。它适用于带AUTOSAR软件组件的嵌入式微控制器、支持Linux操作系统的微处理器,以及集成CPU的以太网交换机。因此,未来软件的复杂性将持续增加,这将对汽车零部件制造商构成巨大挑战。
如今,经典的CAN 2.0、CAN-FD、LIN和FlexRay等现有网络开始逐步连接到基于以太网的ECU。这些连接需要在所谓网关中实现由软件实施的协议转换。最初,在这样的网关中,CAN数据包的传输是通过以太网进行的。在这种情况下,正在讨论将现有信号迁移到面向服务的架构(SOA)。
合适的硬件平台有助于研究处于早期开发阶段的新型通信结构。它们可以带来进行测试和验证的无数可能,以便将创新结构安全可靠地集成于未来的车辆平台。
凭借首个汽车网关平台,英飞凌提供了一个开发平台用于测试基于以太网的新型车辆系统。它具有一个可扩展的模块化系统,紧跟车辆通信当前趋势。来自Realtek的一台汽车以太网交换机提供五个汽车用100Base-T1以太网端口。AURIX™ TC397具有强大的多核架构,通过1Gb/s以太网接口连接到交换机,并支持多种协议:
连接到交换机的另一个1Gb/s以太网端口用于接入标准IT网络。该平台具有12个CAN-FD通道、4个FlexRay通道和4个LIN通道,可提供一系列通信选项。
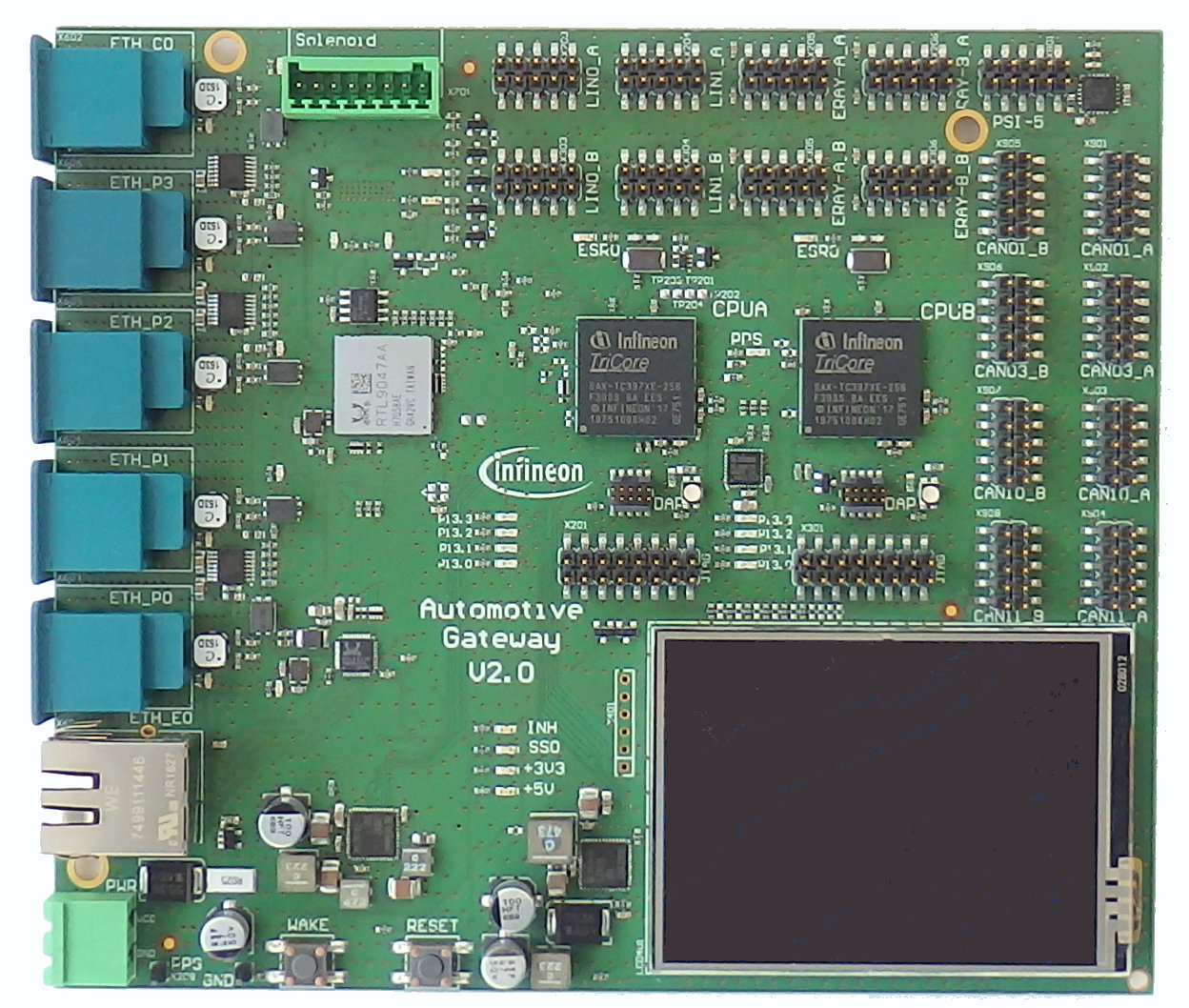
图4:英飞凌网关开发平台
第二个AURIX™微控制器提高了性能,并服务于一些经典网络节点(CAN 2.0、CAN-FD、LIN和FlexRay)。两个组件都通过两条320 Mbit/s高速串行接口(HSSL)连接。这是一种简便快捷的处理器间通信方式,可以在两个AURIX™设备的CPU之间交换数据。
REF _Ref16094668 \h \* MERGEFORMAT VALUE 图5 显示该模块的框图。除上述通信接口外,还提供TPM 2.0模块(可信平台模块)。因此,该开发平台能支持车辆通信中最热门的话题之一:汽车安全。开发人员可以利用各种机制来确保实现车辆网络中的安全通信:
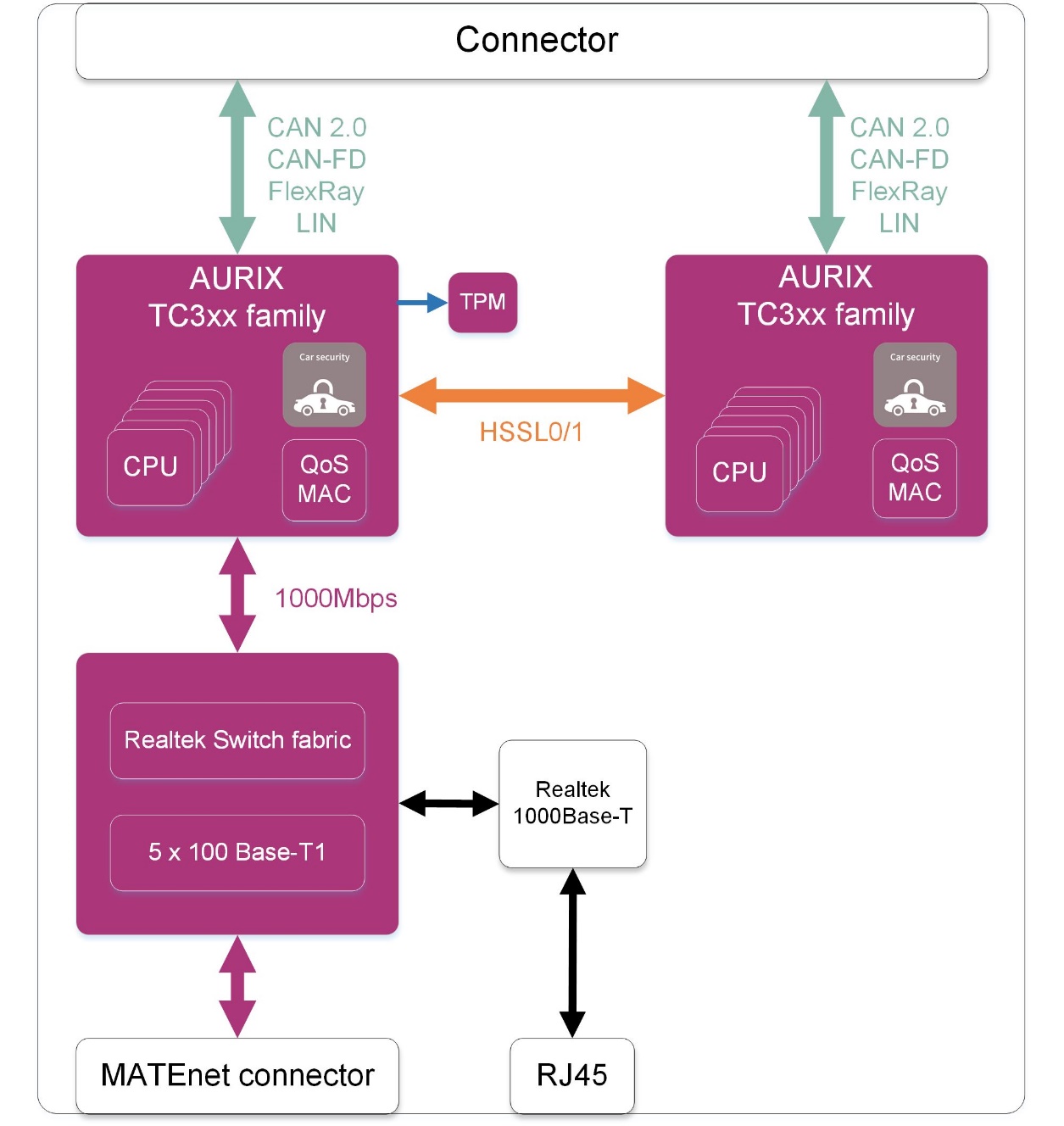
图5:模块框图
由AURIX微控制器及其HSM支持的典型网关用例,包括防火墙、流量整形、无线安全软件更新、入侵检测和防御系统(IDPS)和安全车载通信(SecOC、TLS、IPSec)。
TPM是一种安全加强的可信平台模块(TPM),它基于支持防篡改微控制器的全球标准,采用先进安全技术。TPM标准规定了一系列功能,其中包含100多个支持生成、存储和使用加密密钥及安全关键数据的功能。了解在汽车应用中使用TPM的详情,请参阅[3]。
车辆架构的演变将在未来几年持续进行。基于域的可扩展架构是具有现代功能和高度连接性的车辆的基础。紧随其后的是基于区域的架构,尽管在实施方面存在一些挑战,但可以节省成本和减轻重量。因此,英飞凌汽车网关平台将在未来继续发展。英飞凌将与来自汽车行业的合作伙伴讨论更多平台,以便能够在快速发展的车辆通信领域开发特定应用。这将有助于在早期阶段分析未来趋势,以准备相应的解决方案。
[1] Martin Hiller、Volvo Cars:Towards a central computing architecture for in-vehicle E/E systems(朝着面向车载E/E系统的中央计算架构迈进);2019年慕尼黑汽车以太网大会
[2] Helge Zinner等:Automotive E/E Architecture evolution and the impact on the network(汽车E/E架构演变及对网络的影响);IEEE802全体会议,温哥华,2019年3月,802.1 TSN网址:http://ieee802.org/1/files/public/docs2019/dg-zinner-automotive-architecture-evolution-0319-v02.pdf,2019 年 8 月 13 日访问的网页
[3] Florian Schreiner、Andreas Fuchs:Enabling TPM 2.0 with an open source software stack for industrial and automotive applications(启用针对工业和汽车应用的支持开源软件堆栈的TPM 2.0);2019年纽伦堡嵌入式世界展
作者:Ronny Schulze,微控制器高速通信负责人;Thomas Liebetrau,汽车系统业务主要负责人
 最前沿的电子设计资讯
最前沿的电子设计资讯
