
世界的变化正在快速改变现代仓库的变化。电子商务、零售商、医院和其他第三方物流企业,将自主移动机器人(AMR)视为控制劳动力成本、提高吞吐量、缩短交货时间的关键技术。工厂的老板和经理想要快速、易于部署,并且能够即时更改的AMR。与其前身无人搬运车(AGV)有所不同,AMR可以理解命令并动态检测和避开障碍物,在不同的工作环境中进行导航,因此无需在现有路径上或者由操作员控制其运动。本文描述了使用集成的软硬件技术开发和部署AMR,并包含工厂、智慧城市和医院的实际应用案例。
AMR市场正在蓬勃发展。2020年,其市场规模约为3.56亿美元。据MarketWatch预测,到2026年,AMR全球市场规模将增至10.11亿美元,年复合增长率(CAGR)为15.9%。制造和物流企业需要高吞吐量、快速简单的机器人部署以及灵活的生产线。这一发展趋势伴随着新应用的出现,驱动着AGV向AMR的重大转变。为了理解这个转变,让我们先来解释一下这两种技术。
直到现在,AGV也代表了最新的先进技术——能够将原材料、半成品和成品运输到制造生产线上或者放到仓库存储或者送到物流中心进行检索。AGV使用软件以及基于传感器的导引系统来引导其路径。它们在运送货品时安全可靠,因为他们遵循固定的路线进行移动,具有精确控制的加速和减速以及障碍物检测缓冲器。
然而,AGV缺乏灵活性(见图1),例如,如果生产线布局发生变化,这就意味着导航的轨道基础设施需要重新进行路线规划,这样往往会牵涉到时间和相关成本的问题。当AGV检测到障碍物时,它就会停止,直到有人移除了障碍物。此外,AGV无法进行人机互动,因为车队管理系统是集中式的,非点对点的通信。
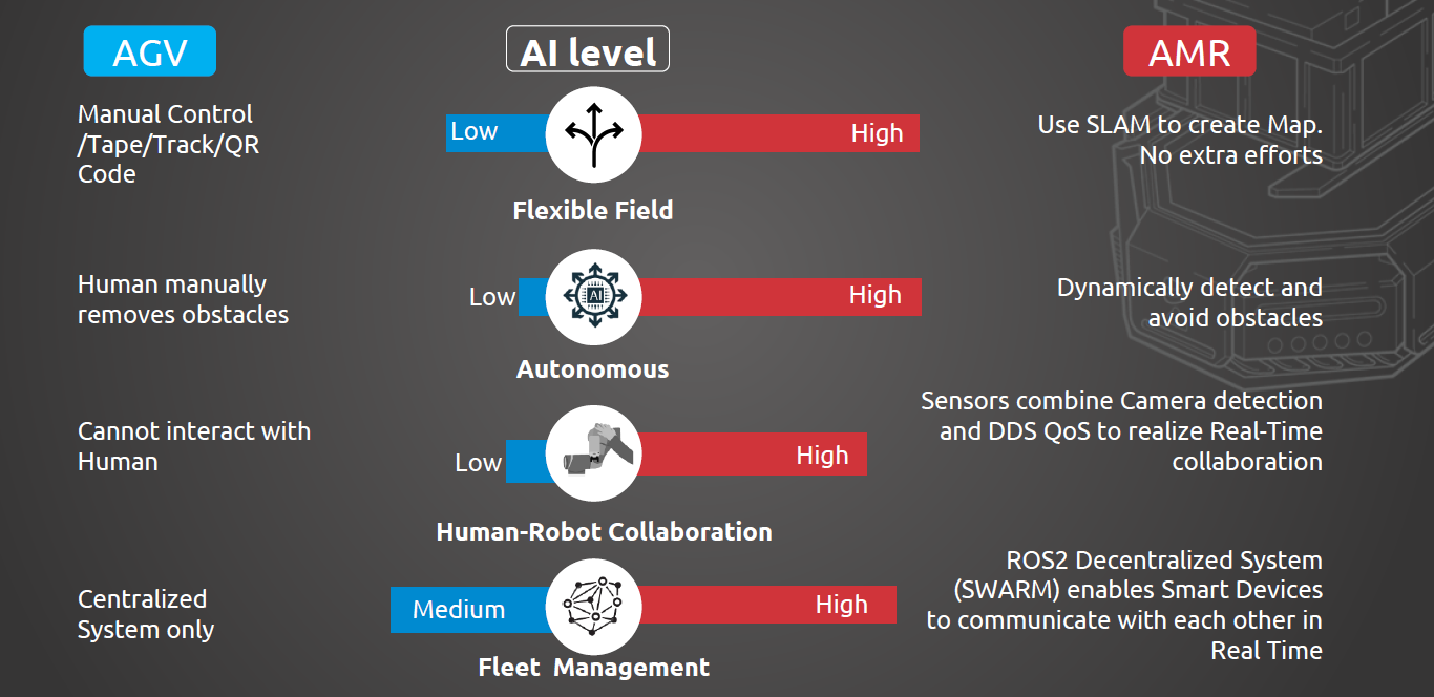
图1. AGV和AMR之间的比较
与AGV相比,AMR更加灵活。如果产线布局发生变化,同步定位与建图(SLAM)可以让机器人探索不熟悉的位置空间以便自动创建地图,且无需操作人员额外的努力或者成本。AMR可以使用一系列的传感器技术来动态检测和躲避障碍物,包括人。这些机器人使用传感器和摄像头检测与实时.通信相结合的技术,实现了与人类的实时协作。
机器人操作系统(ROS)是一个用于机器人软件开发的开源框架,它既不是机器人也不是操作系统。ROS是由两位斯坦福大学的博士Eric Berger 和 Keenan Wyrobek与2007年创建的,他们期望即使是掌握很少机器人硬件相关知识的软件开发人员,也能够为机器人编写软件。
如今,ROS Classic(亦称ROS 1)已经拥有丰富且稳定的软件包、工具和教程,涵盖用于开发不同机器人应用程序的硬件。ROS模块包含了传感器的融合、导航、可视化和运动规划。
ROS 1最初只是为了学术用途而开发的,其使用前提是拥有完美的通信能力。但是在现实世界中,通信条件并非想象的那么完美,尤其是在工业环境中。一些变化的因素,如带宽、网络的可用性和通信的范围,以及透过电池供电的移动机器人的收发器的功耗,都大大增加了系统的复杂度。此外,ROS 1仅仅适用于单个机器人。想要工厂更加智能,就需要有多个机器人,且需要这些机器人之间能够相互协作。基于DDS(Data Distribution Service)的通信架构,ROS 2通过机群自治的方式让车队管理系统去中心化,让AMR实现了对等的实时的通信。
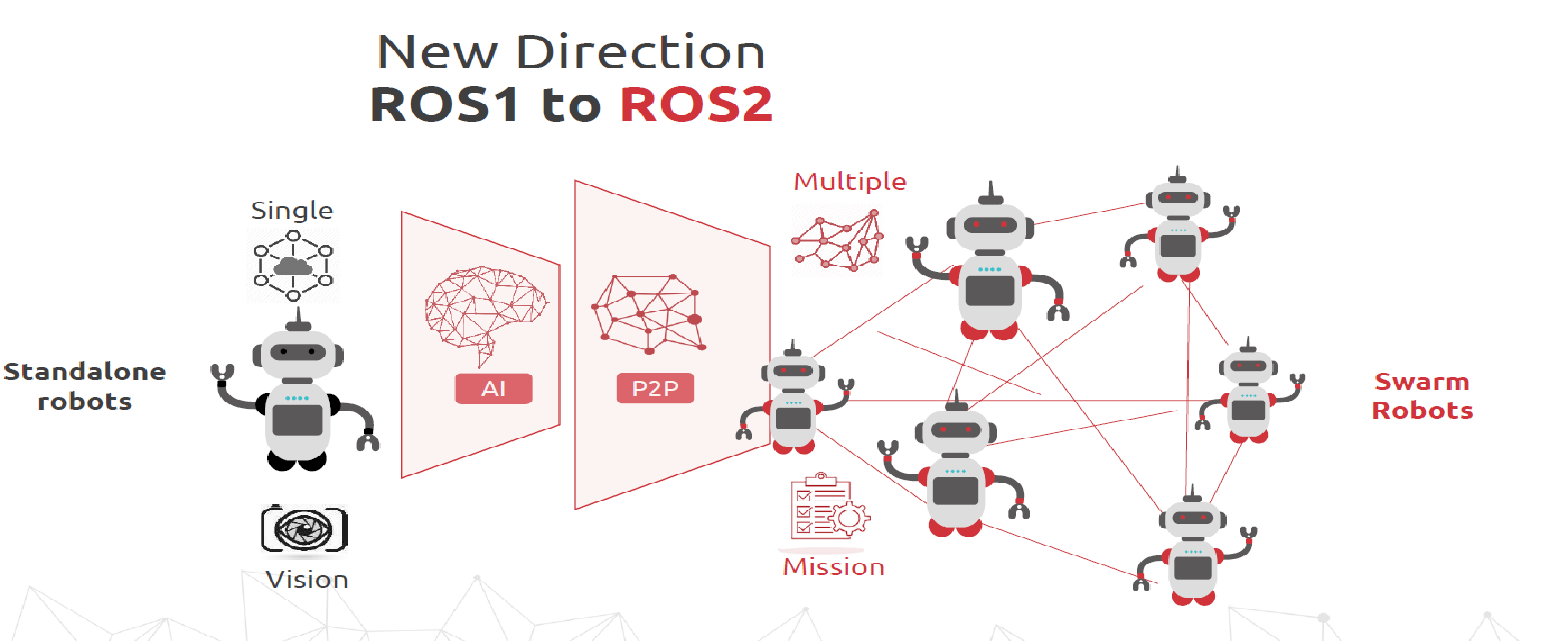
图2. 一个新的方向:从ROS 1到ROS 2的迁移,实现了机群机器人的自主化
从AGV到AMR的转变以及从ROS 1到ROS 2的迁移,可能是由于工厂经理的工作优先级引起或者驱动的。在现代的智能工厂、仓库和物流中心,工厂经理往往希望有更高的吞吐量。他们需要高效且能够执行其他任务的AMR。业主还希望能够快速且轻松地进行部署,这就意味着他们需要AMR来快速升级运营,且无需预安装任何基础设施。他们还需要能够灵活的修改生产线、实时调整设置并轻松执行任务。由于这些原因,虽然许多开发人员使用ROS 1进行了AMR的原型设计,但都有迁移到ROS 2的需求。
构建新一代基于ROS 2 的AMR挑战
AMR的未来是实现机群的自治。机群自主移动机器人可以在几乎没有人类操作监督的情况下,完成他们的工作。为了实现这一目标,行业必须从ROS 1迁移到ROS 2。
但是,迁移到ROS 2具有一定的挑战性,尤其是在开发和部署大量AMR时。对于已经使用ROS 1的开发人员来说,主要面临三大挑战:复杂性、可扩展性和可升级性。
AMR的设计比较复杂,想要构建一个机器人系统,开发人员需要选择和购买从计算平台到传感器、运动控制器等硬件,还要考虑机械设计、安装软件(操作系统、驱动和软件包)。如果开发人员对系统不熟悉,完成整个系统集成可能需要长达一个月的时间。如果还需要实时能力和专用的QoS等先进功能,那么开发人员就必须自行编写代码。一旦开始构建机器人作为概念验证时,可扩展性和部署就成为更大的问题。
ROS 1的构建本意并不是用于多个AMR之间的通信,用ROS 1来开发AMR管理系统来说,会给AMR带来准确性、故障以及损坏的风险。运营者需要的是大规模的AMR部署,而不是高昂的执行成本。
并且对ROS 1的支持预计将在2025年中止(EOL),这就意味着更多的公司需要确定如何从ROS 1迁移到ROS 2。为此,开发人员需要熟悉迁移的过程。
ROS 2将ROS 1从学术界带入了工业领域。ROS 2允许通过多机器人之间的协作以及可靠的、容错的实时通信在工业中使用。ROS 2采用DDS做为通信主干,提供了一个统一的数据交换环境,就像一条数据之河,因此,机群AMR可以相互通信。其他采用分布式数据服务(DDS)技术的设备,也可以使用数据之河来共享数据。
DDS是ROS 2的一个关键组件,其技术核心是以数据为中心的发布-订阅(Data-Centric Publish-Subscribe, DCPS)模式,提供了一个所有独立应用均可访问的全局数据空间。美国海军使用ROS 2解决了舰船在复杂的网络环境下大规模进行软件升级的兼容性问题。自2004年对象管理组(Object Management Group, OMG)发布以来,DDS被广泛用作数据发布和订阅的标准解决方案,在自主和要求苛刻的系统中,实现分布式的实时通信。
在寻找合适的基于ROS 2的AMR解决方案时,需要考虑以下几个因素。
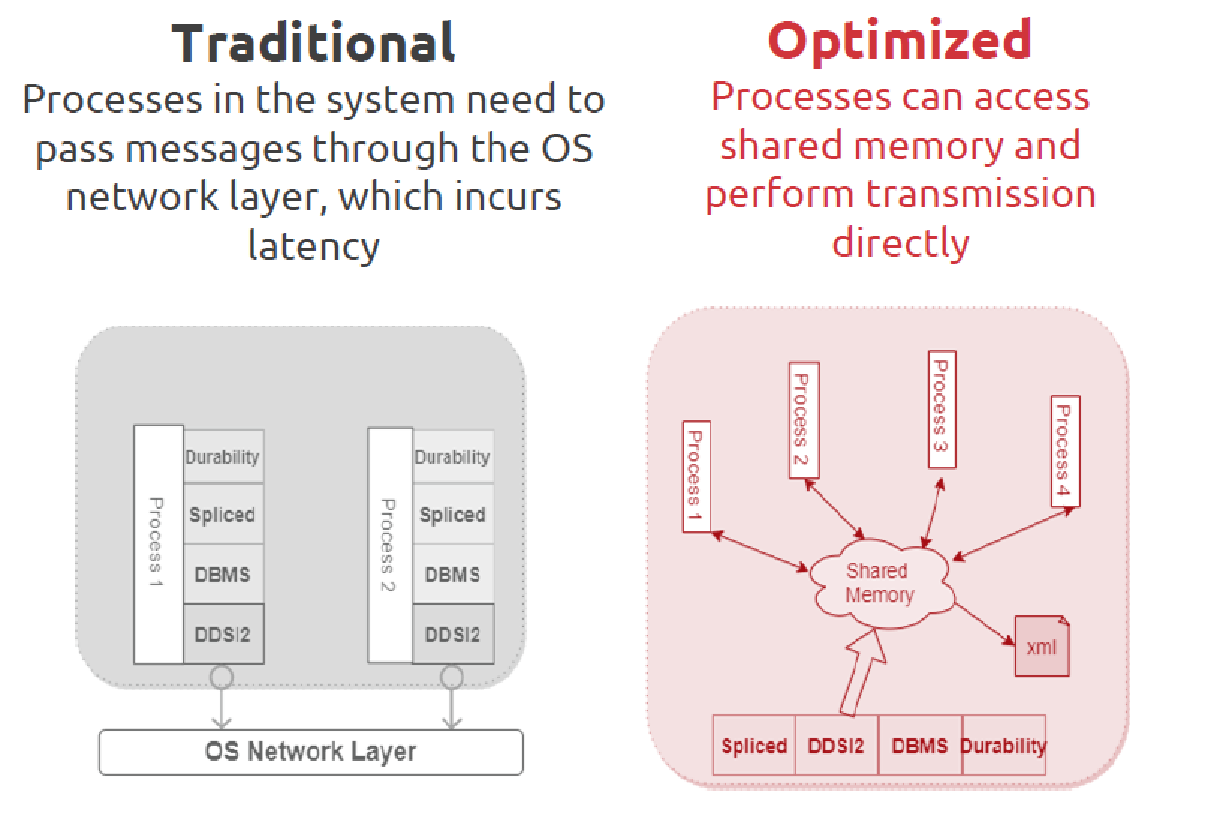
图3. 使用共享内存的机制优化进程间的的通信
最后要考虑解决方案是否易于实施。一些供应商提供了软件开发工具包(SDK),通过优化DDS的性能,支持机群架构并确保通信的稳定可靠。Eclipse Cyclone DDS是一种快速可靠的DDS实现,被ROS 2技术指导委员会(TSC)选为ROS 2 Galactic Geochelone版本的默认ROS中间件(RMW)。此默认配置适用于大多数开发人员。 或者,他们也可以使用非默认RMW进行配置。
为了更轻松地实施和更快地部署,请寻找能够提供集成开发环境(IDE)、经过测试和验证的软件包的应用,以及提供参考设计示例代码的供应商。为了帮助开发人员轻松地从ROS 1迁移到ROS 2,一些供应商还提供了迁移指南,其中包括不同的方法并描述了与迁移过程相关的好处和问题。
凌华科技目前正与全球制造业的巨头鸿海科技集团(富士康)合作。富士康在其生产设施中使用了AGV,但他们希望提高生产线的灵活性。富士康与凌华科技共同成立了一家名为FARobot法博智能移动的合资企业,利用ROS 2开发先进的机群机器人系统(swarm robot system, SRS)和自主移动机器人(AMR)解决方案(见图4)。

图 4. FARobot AMR机器人可以提高工业生产的效率和生产力
由于AMR之间可以进行实时通信,因此它们可以执行任务调度和分配,并使用对等的通信方式来确定每个AMR的位置路径。如果其中一台AMR出现故障,车队将立即启动备份预案,并自动派出最合适的机器人进行协助。
FARobot独特的AMR解决方案具有机群协作、任务故障转移和性能优化等特点。通过采用最新的机群自治技术,FARobot AMR机器人可以提高工业生产的效率和生产力。例如,在正确的时间将正确的原料或组件运送到正确的地点,以此减少不必要的停留。
友嘉集团是全球最大的机床制造商之一,劳动力的短缺和需求的变化让该公司意识到需要立即进行物流升级、提升检测能力以及增强技术服务。虽然该公司使用了AGV,但是他们希望增加系统的灵活性以提高效率并降低成本。友嘉集团联合凌华科技、台湾资策会(III)共同构建智能工厂。
在部署智能工厂解决方案时,您必须考虑制造的灵活性、工厂的扩张和产线的快速切换。在这些环境中,沟通是关键。DDS可以在有线和无线网络以及具有多种无线通信技术的生产制造环境中充当中间件。具有高可靠性的DDS,结合5G专网的低延时和高速传输,可以提升AGV的灵敏度和响应速度。
第一次实施机群自治是在友嘉集团的岩田友嘉精机工厂的工业级喷枪生产线上,该工厂位于台湾新竹县湖口镇。生产设备和运营监控中心与5G专网和DDS进行了实时的整合,并与生产线信息集成,通过连接到AMR,将零部件运送到多个检测部门以提高生产力(见图5)。
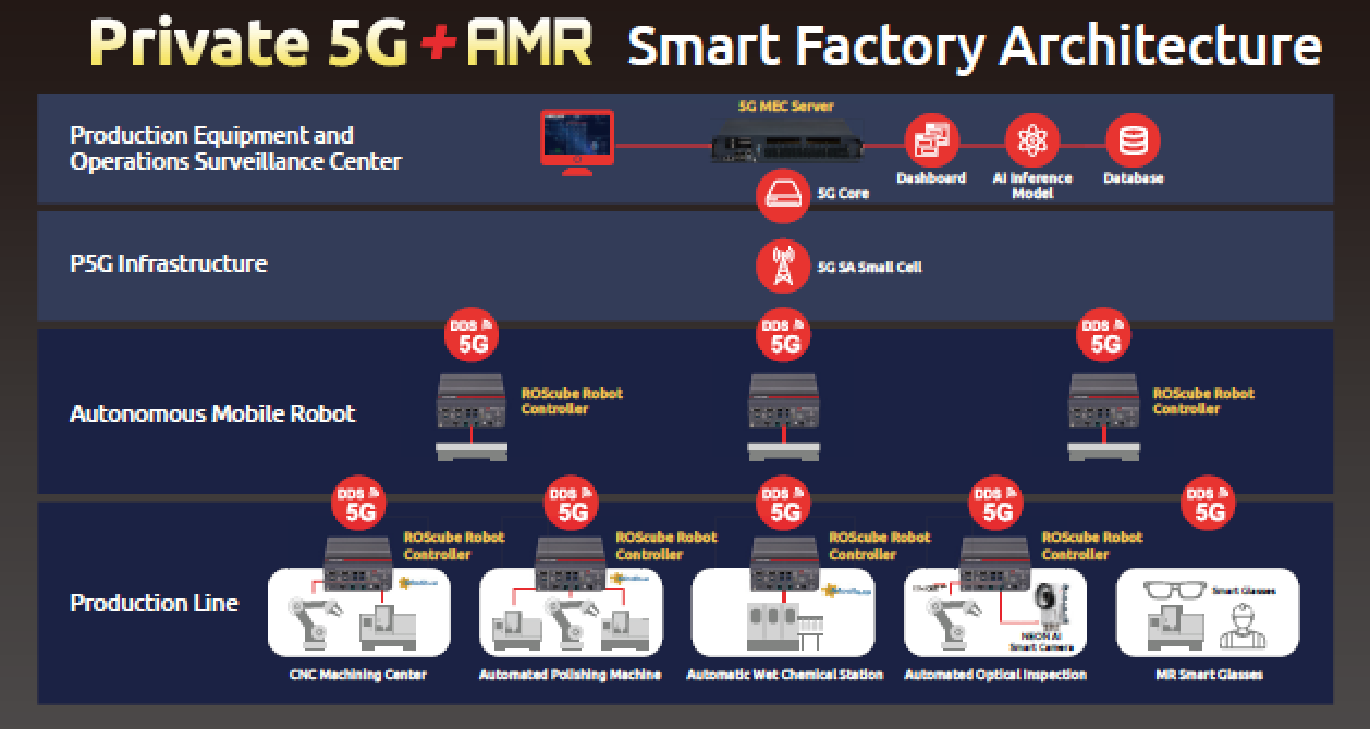
图5. 实时集成生产线信息并连接AMR进行运输。
该实施包括三个重要的技术应用:AMR解决方案、自动光学检测(AOI)和增强现实(AR)智能眼镜。 该组合使工厂的良品率提高了15%,生产成本降低了20%。
随着对采用对等通信的机群自治需求的增加,行业趋势将继续从AGV过渡到AMR,从ROS 1迁移到ROS 2。ROS 2是辅助AMR 开发和部署的突破,涵盖了包括工业在内的众多行业。
最近的疫情将AMR引入了医疗领域,以实现病房和重症监护病房的自动消毒。AMR还可以为患者提供支持和移动协助。零售业、店面和餐厅的服务机器人,以及用于智能订单交货的最后一公里服务都有AMR的身影。其他应用包括自主农业和智能收割、建筑、工业情节以及灾难恢复等等。
AMR的开发和部署需要付出更多的努力,这个不是一个公司就能够完成的。它需要一个完整的生态系统,包含了实时软硬件平台提供商、传感器和系统集成商、应用的最终用户。凌华科技通过将硬件和软件与通信技术相结合,来支持开发人员在5G专网的环境下,快速、灵活、以成本最优的方式构建和部署AMR。
【关于凌华科技】
凌华科技(股票代号:6166)引领边缘计算,是AI人工智能驱动世界的推动者。我们制造并开发用于嵌入式、分布式与智能计算的边缘硬件与软件解决方案,全球超过1600家客户信任凌华科技,选择我们作为其关键任务的重要伙伴,从重症监护室的医疗计算机到全球第一辆高速自动驾驶赛车,都有我们的足迹。
凌华科技是英特尔、NVIDIA、AWS和SAS的重要合作伙伴,并加入了英特尔顾问委员会、ROS 2技术指导委员会以及Autoware自动驾驶开源基金会。我们积极参与了开源技术、机器人、自主化、物联网、5G等超过24个标准规范的制定,以驱动智能制造、网络通信、智能医疗、能源、国防军工、智能交通与信息娱乐等领域的创新。
凌华科技拥有1800多名员工和200多家合作伙伴。25年以来,我们秉持并推动当今和未来技术的发展,创新科技,转动世界。
 最前沿的电子设计资讯
最前沿的电子设计资讯
