
常见多旋翼无人机通常使用电子调速器作为电机的驱动部件,是一种比较常见的电机驱动装置。电子调速器的主要通过PWM脉冲来实现三相激励电流。典型的BLDC驱动如图1.1所示。 Q1-Q6是6个MOSFET组成的直流转交流的逆变电桥,每只管子在驱动信号激励下,有序开通和关闭,形成交流驱动源。
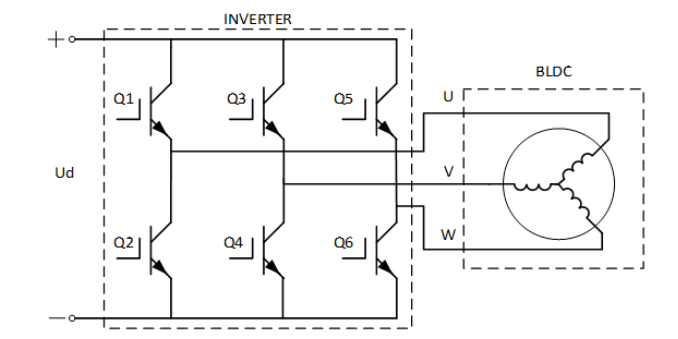
图1.1 三相逆变桥结构图
但是,由于实际电路总是存在一些未知影响因素。例如,驱动管输入电容不一致、控制信号线长度不一致、驱动管开启与关断时延不一致等。使得一组桥臂的两个MOSFET管的导通或截至的时间不同步,极易出现同一个桥臂的两个管子同时导通的情况。当上下两个MOSFET管同时导通时,尽管时间非常短暂也会形成极大的短路脉冲电流,导致电源效率下降,驱动管子发热等现象,甚至损毁驱动管。
本文通过任意波发生器对无刷电子调速驱动电路进行实验测试解决驱动不一致问题。在精确测量出驱动信号经过每组MOS管所产生的时延后,根据所测的时延差数据,通过软件进行调整和优化,最后使驱动电桥到达最优工作状态。
如图2.1所示,该部分为电子调速器A相输出,驱动器使用了集成电路。图2.2完整实验板PCB,可以发现制作PCB板时由于走线原因,A相驱动线是两根不等长的线,A_H线较长,A_L线较短。
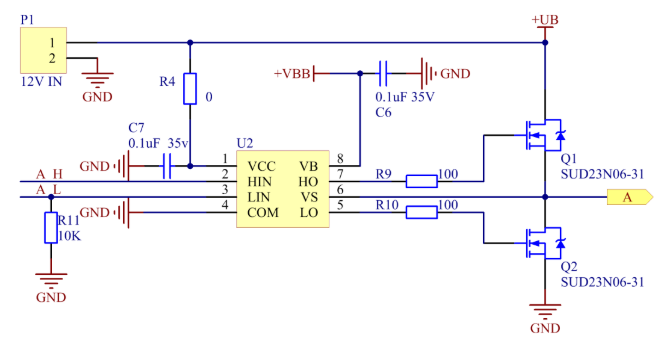
图2.1 电子调速器A相驱动电路原理
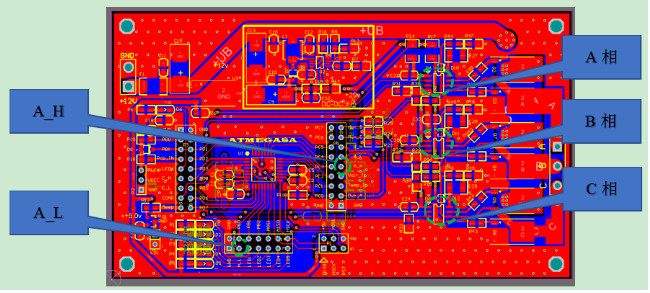
图2.2电子调速器PCB
泰克AFG31000任意波函数发生器可以输出双路驱动信号,每个通道独立可调整,将双路输出调整为可以激励双输入模式,通过示波器观察将激励信号的在电路板上的驱动点位置将边沿对齐。
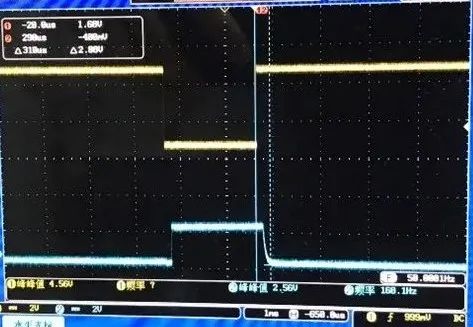
图3.1 双通路高速示波器测试A_L端信号激励点到电机接口时延
图3.1中可以观察到A_L端信号通过线路及驱动器件后产生的时延。信号在下降沿部分产生了弯曲变化,这可能是线路上分布电容引起的。对所有驱动端分别激励并测量出每个通道的时延。表1给出了各个通道测量结果,可以看到B相和C相近似相等,A相最差。从PCB电路上可以发现A相两路信号对称性最差,B相和C相接近一致。A相有约2us的时延差别。
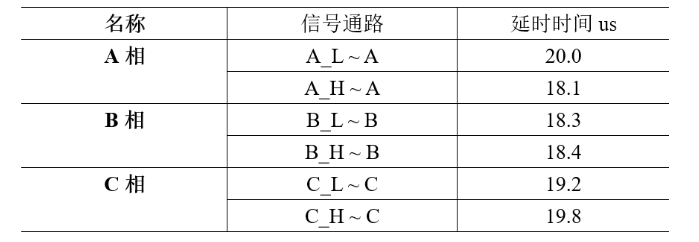
表1 各信号通路延时值测量
根据各路实测结果,可以确认线路最大延迟量为20us,由此在软件设计上将各路驱动进行对等延迟优化,尽量满足驱动信号达到各输出端时基本一致,比如将A-H这路增加1.9us达到20us。这里单片机的运行速度决定了驱动器能达到的精准性。如有可能,使用汇编写这个部分是最佳的方法。汇编语言具有很好实时性,可以将误差控制在一个机器周期以内,不过使用汇编比较繁琐和复杂。实际调试中可以使用C语言编程,再利用反汇编进行调试。本实验中采用反汇编环境进行调试测算,最后将驱动时延调整到最小误差状态。
电子调速器经过实际测量与程序优化后,需要证明这种优化带来的效果。为此设计了一组对比测量,环境搭建如图3.1所示。将调速器安装上带桨叶的电机,然后通过优化程序与未优化程序激励驱动器进行比较。在相同电路,相同供电电压情况下,对比在不同转速情况下的工作电流。测量结果如表2所示。

表2 电源12V情况下相同电机相同驱动电路不同转速时工作电流对比
通过对比可以看到,不论是优化程序激励的驱动器,还是未优化程序所激励的驱动器,随着转速提高,工作电流都成倍增加。这是因为转速提高后,电机阻力成倍增加的缘故。对比相同转速情况下的电流,可以发现转速较低时,优化后的驱动器电流减少并不多,没有多大优势。而在高转速情况下,电流减少较多,优势十分明显。此外通过供电电流测量还发现优化后的驱动器电流变化平稳,没有出现大电流脉冲,减少了调速器产生的电磁干扰。可见优化设计带来了不少的好处。图4.1是根据图2.2进一步改进和缩小尺寸的驱动板,其性能进一步提升。目前该驱动板已应用到实际使用中,效率高、省电节能效果良好。

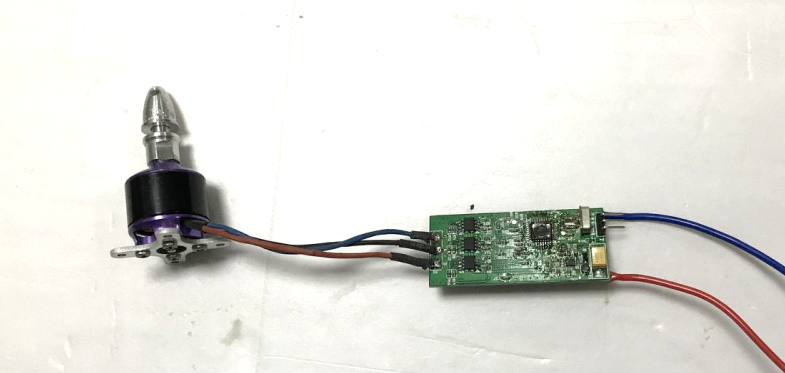
图4.1 改进的电子调速器实物
使用任意波发生器可以有效检测驱动电路的延时特性,为优化设计带来明晰的方向,从而提高电路性能以及电磁兼容特性。
泰克公司总部位于美国俄勒冈州毕佛顿市,致力提供创新、精确、操作简便的测试、测量和监测解决方案,解决各种问题,释放洞察力,推动创新能力。70多年来,泰克一直走在数字时代前沿。欢迎加入我们的创新之旅,敬请登录:tek.com.cn
# # #
Tektronix是泰克公司的注册商标。所有其他商号均为各自公司的服务标志、商标或注册商标。
 最前沿的电子设计资讯
最前沿的电子设计资讯
