
本章节将详细介绍 PFC 的控制策略,包括状态机以及控制算法(控制环路)。状态机在 UCB 的 ARM 内核上运行,控制算法在状态机的“直流总线 VOLTAGE_CONTROL”状态下运行,并在 FPGA 芯片上实现。
在接下来的章节中,我们将提供有关状态机和算法功能的更多详细信息。图 7 提供了 PFC 状态机概览,其中“直流总线 VOLTAGE_CONTROL”状态以绿色突出显示,在此状态下控制环路和 FPGA 将接管控制并运行主算法功能。
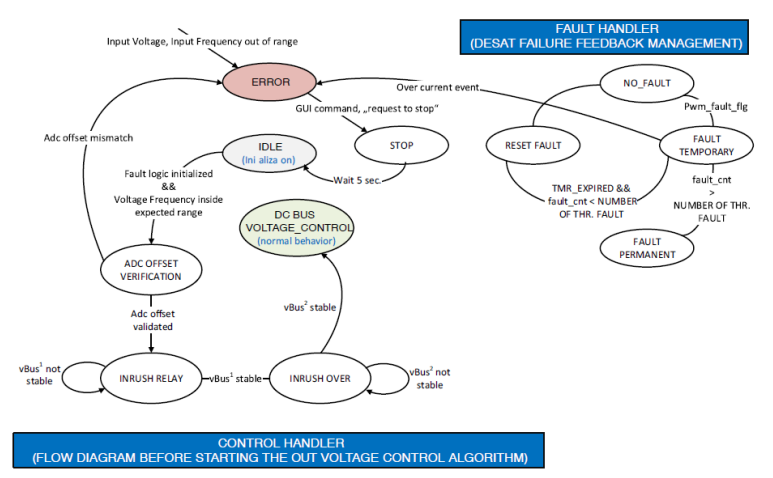
图 7.PFC 转换器状态机概览。
当向充电桩的输入连接器提供 50 Hz 的三相电压时,由于 PFC 拓扑的性质,输出总线电容电压会升高。由于每个 MOSFET 上都存在寄生续流二极管,带有 MOSFET 的无桥 PFC 保证了从输入到输出的电流路径。
当 MOSFET 全部关断时,电路板简化为三相二极管桥。整流后的输入交流电压将根据电源电压幅度和 MOSFET 体二极管的正向电压,被设置为定义的电平。然而,期望在输入端至少提供一个最小交流电压。因此,两个不同线路上的电阻用作浪涌电流限制器。
一旦总线电压达到 230 V,主辅助电源开始工作。该电源与一系列 DC-DC 稳压器一起,生成为数字和模拟电路供电所需的其他电压电平。有关 PFC 功能的更多详细信息,请参阅安森美 AND9957/D 车载充电桩 PFC 转换器应用笔记[8],其中的实施策略与此 25 kW 直流充电桩项目相同。
如上所述,PFC 的状态机在 UCB 的 ARM 内核上运行。其顺序从图 7 中所示的 IDLE 模块开始,然后进入 ADC 通道中的偏移电压验证和输入电压监控和检测。这些用于确定三个电压的频率和相位角。该相位角将作为系统实现功率因数校正的基准。
当直流总线电压达到平坦稳定状态时,PFC 控制器向继电器发送指令,旁路浪涌电阻并允许输出总线电压进一步升高。但是,电压增量将低于整流后的输入电压幅度 √6∙VPH rms。PFC 控制器将等到总线电压再次平坦,以便开始控制总线电压,达到 800 V 的目标值。不会一步达到目标值,它跟随一个平滑的斜坡发生器,使总线电压值按照参数化的斜坡上升到最终的 800V。
PFC 只实现了一种硬件保护,利用 NCD57000DWR2G 栅极驱动器的 DESAT 功能防止过电流事件。但是,DESAT 硬件保护可以与软件保护相结合,生成到 NAND 门的单端输入,从而为 PWM 生成提供硬件停止。
只能通过 GUI 发送的复位命令或通过断电/上电序列来复位故障条件,这两种方式分别代表硬件/软件复位。有关 PFC 功能的更多详细信息,请参见参考文献 8,它所描述的实施策略与此 25 kW 直流充电桩项目相同。
图 8 说明了作为完整仿真模型一部分的 PFC 控制模块。PFC 算法使用七个输入和三个输出(概述参见表 3)。作为本项目的一部分,我们将运行和测试不同的调制策略,以评估哪一种策略能在效率和谐波失真方面产生更好的结果。该控制策略与参考文献 8 中描述的策略相同。
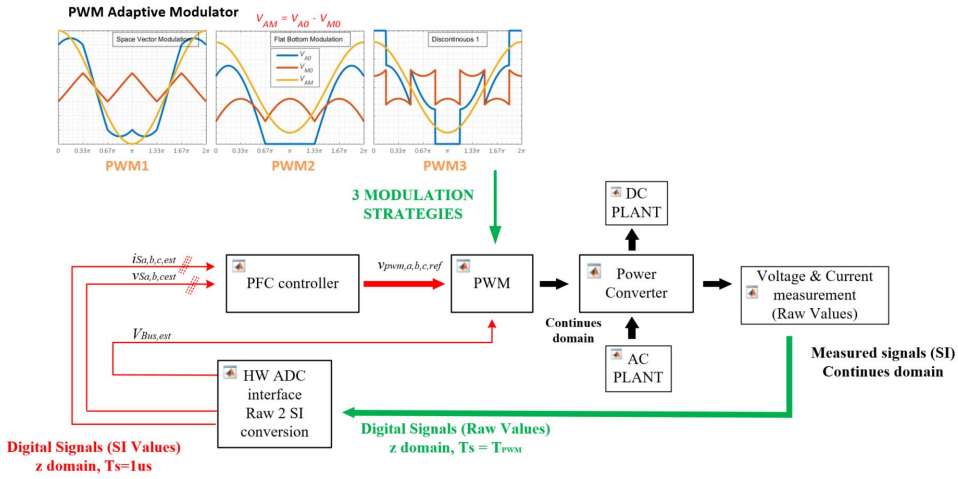
图 8.PFC 控制算法的高级框图。
表 3:PFC 控制算法的输入和输出参数。

图 9 作为更深入的研究,详细显示了构成 PFC 算法的模块和关系。VLINE 电压用于确定交流电压相量的实际位置。然后,使用角度 θ 将电流相位延迟调节到 0°,这是 PFC 的主要目标。电压位置用于通过克拉克和帕克变换,从静止 ABC 系统参考转换到旋转 DQ 坐标系(对于 PFC,D 轴表示相电压相量的幅值)。
由于角度 θ 已知,所有电量都可以在 DQ 系统中表示;这种简化操作确保能够使用简单的比例积分 (PI) 调节器。PI 的增益调整取决于待调节设备的传递函数。当可提供一个常数作为参考量时,PI 调节器确实可以有效地将误差调节为零,但这些调节器不能调节交流参考量。
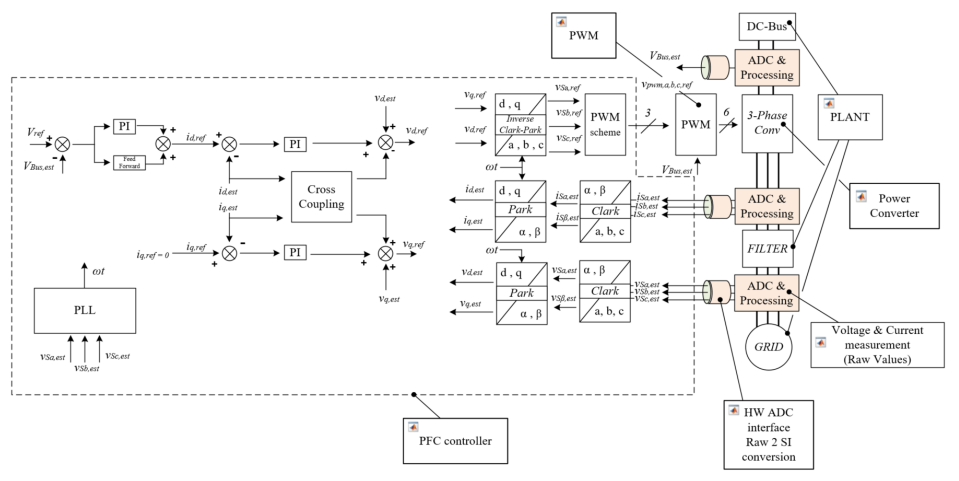
图 9.PFC 控制算法的详细框图。
在任何情况下,PI 调节器都需要某种校准,以确保适当的系统稳定性。通常期望电流环路(内部)的响应较快,外部环路(电压)的响应较慢。此时值得注意的是,电流控制环路与 PWM 同步运行。同步程序确保 ADC 外设可在 PWM 载波的准确时间实例中被触发,以确保在测量的电流量中自然滤除开关纹波。
需补充说明的是,由于存在固有的 ADC 测量延迟,PWM 频率并不完全独立于控制频率,该延迟应当足够小,以保证在开关周期内及时执行 PFC 算法。由于 FPGA PFC 控制器的延迟非常低,约为 150 纳秒,因此 PWM 频率的主要限制因素是 ADC 采样和转换时间。一旦有了 ADC 的数量,控制实现就很简单了。
已使用 MATLAB 对 PFC 的主要功能进行了广泛的测试,如“使用 MATLAB 生成 IP 的步骤”章节中所述。使用的 Simulink 主模型如图 10 所示(该模型中唯一缺少的部分是用于测试固件状态机的 S 函数)。图中对所使用的模块进行了解释。
请注意,这一级的模型主要由 Simulink 模块组成,包括三相电源转换器的平均模型。PFC 的电网和互连滤波器利用
Simscape Electrical 库中的模型,而直流负载和电容(直流装置)的建模则是通过 Laplace Simulink 模块的帮助。该模型很轻,可使用传统的笔记本电脑支持合理的仿真时间,实现 0.1 秒的仿真只需不到 1 分钟的时间。
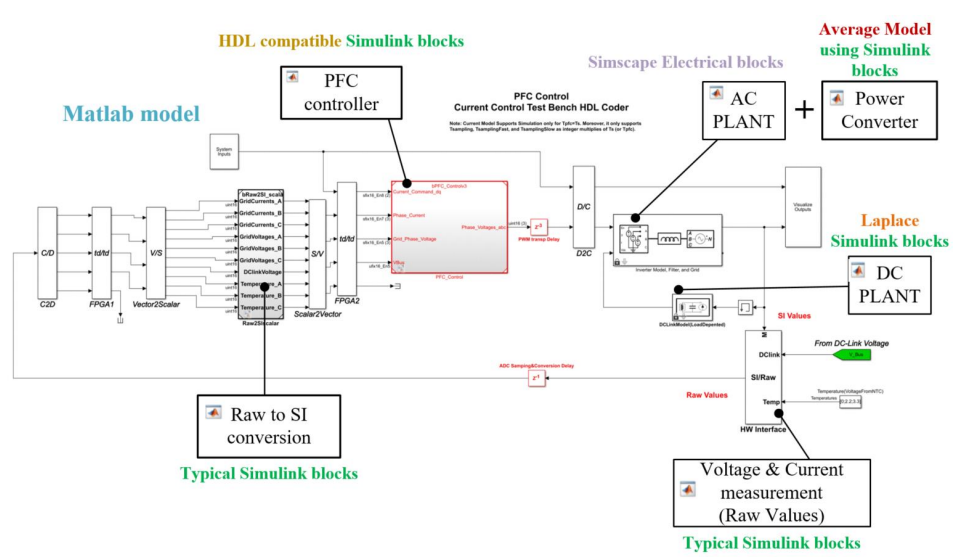
图 10.主 PFC 控制器 Simulink 模型。直流设备模块(简单的电阻和电容)用作测试 PFC 算法功能的负载,并不代表实际 DAB 转换器的模型。
 最前沿的电子设计资讯
最前沿的电子设计资讯
