
控制电机速度和旋转的能力,是无人机的设计关键,这就使电子调速(简称电调,ESC)模块成为无人机的一个基础增值部分。在本文中,我们将探讨设计电调和市场开发解决方案时要考虑的关键要素。电调的设计需要仔细评估和分析多项特征,总结如下:
无人机的使用正在稳步增长,应用范围从商业到军事领域。大多数无人机由无刷直流电机提供动力,这需要对速度和旋转方向进行适当、持续的调节。电调用来执行这些功能,它包括电源级、电流检测电路、MCU和与飞行控制系统的通信接口。
无人机必须具有高度的稳定性和效率,才能成功执行其所设计的应用;这使其即使在最关键最恶劣的天气条件下也能运行。在由电机驱动并由电池供电的无人机的特定情况下(当然,不考虑军事领域,这是迄今为止最常见的解决方案),必须确保每次电池组充满电能实现最长的运行时间。
无人机的一个主要优势是可以远程操作,飞越人类所难以到达、危险或不舒服的区域。商业应用包括农业、植物和建筑监控(安全、视频监控和预防),甚至包裹、药品或其他必需品的交付。许多人认为,无人机的采用是一场革命,其影响将在未来几年变得更加明显。亚马逊和Facebook等大公司从一开始就押注于无人机所提供的巨大潜力,分别开发了使用无人机(UAV)在偏远地区和人迹罕至的地方交付产品和提供互联网连接等项目。
无人机上可以安装两种无刷电机:无刷直流电机(BLDC)和无刷交流电机(BLAC),后者也称为永磁同步电机(PMSM)。选择使用哪种类型的电机,受所选控制算法的影响,可以是梯形控制或磁场定向控制(FOC)。梯形电机控制算法具有以下主要特点:
另一方面,FOC控制算法具有以下特点:
在无传感器控制系统中,电机的磁角是根据电机相电压和相电流估算的。它的位置通过监测电机的某些电气参数来确定,因而无需使用额外的传感器。无人机中最常用的类型是无刷直流电机,因为它体积小、成本相对较低、耐用性和鲁棒性高。
大多数无人机至少有四个电机,四电机版本是最常用的。电调负责控制每个电机的速度,因此,最常见的无人机架构涉及为每个电机专门使用一个电调。所有电调必须能够通过飞控直接或间接相互通信,以便轻松控制无人机。每个电机旋转的方向也很重要:在四轴飞行器中,一对电机朝一个方向转动,而另一对则朝相反方向转动。
电调制造商最常用的电机控制技术是磁场定向控制,也即一种控制电机扭矩和速度的技术。如果实现得当,FOC甚至可以处理快速的加速度变化而不会引起不稳定,从而使无人机能够执行复杂的机动,同时最大限度地提高效率。
图1中的框图显示了一种FOC架构,其中包括以下组成部分:
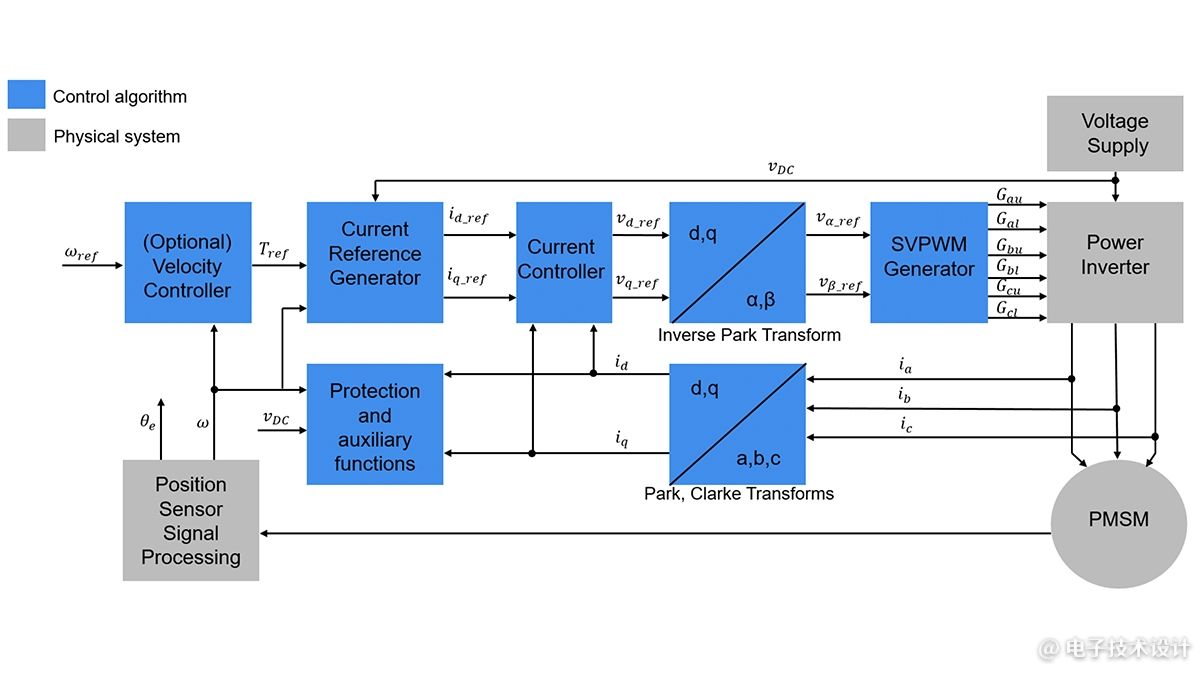
图1:磁场定向控制框图。(图片来源:Mathworks)
设计FOC的电机控制工程师要执行多项任务,包括为电流回路开发具有两个PI控制器的控制器架构,优化所有PI控制器的增益以满足性能要求,以及设计空间矢量调制器来控制PWM。
一旦选择了控制算法(梯形或FOC),下一步就是在开环和闭环控制系统之间进行选择。在开环控制中,同步电机(BLDC或BLAC)通过控制信号驱动,并假定遵循命令控制动作。在闭环控制系统中,电路能够检查电机是否按预期运行。如果不是,控制系统可通过减小或增加电流来自动补偿过度或不足的运动。
当采用闭环或开环(无传感器)控制系统时,必须对电流和电压进行测量而将其用作反馈信号。图2给出了典型的测量设置,它适用于梯形和正弦控制系统。通过使用带有无传感器算法的梯形控制,无传感器算法使用三相电压来计算转子角。
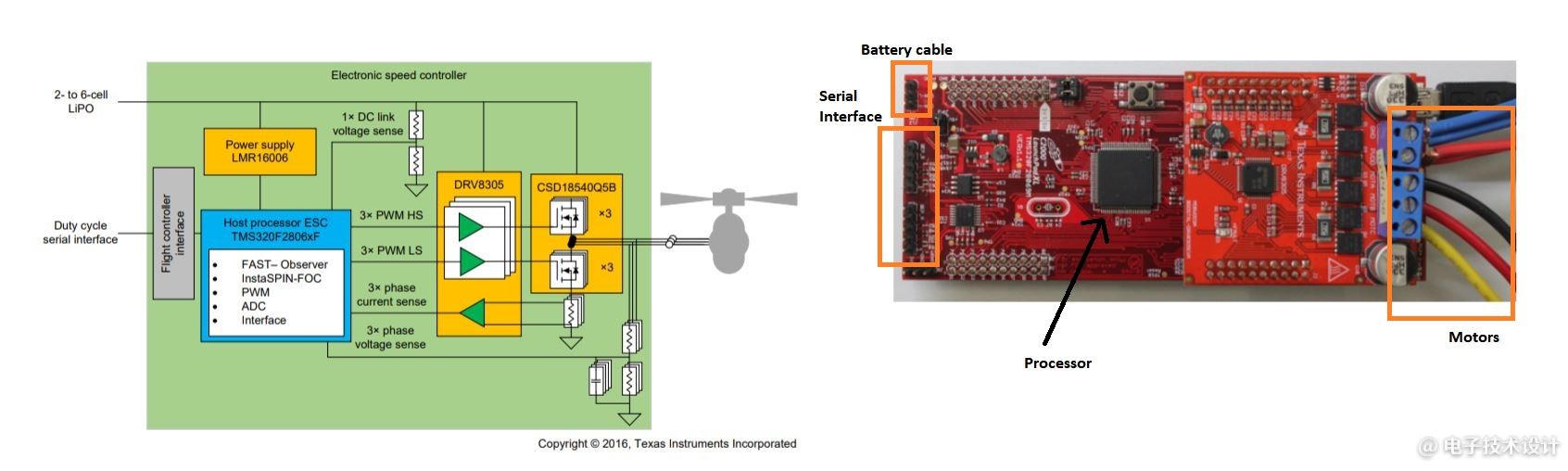
图2:带有无传感器电机控制的ESC。右侧是德州仪器的无人机ESC高速无传感器FOC参考设计,左侧是其框图。(图片来源:TI)
无人机的机械简单性和空气动力学稳定性与电机的协调使用及其机动有关。在四轴飞行器中,位于结构对角线上的一对电机与其他两个电机的转动方向相同,但方向相反。如果所有四个电机都以相同的速度转动,则无人机可以进行爬升、下降或保持水平飞行。如果一对对角线电机比另一对转得快,则无人机将围绕其重心旋转并保持在同一水平面上(图3)。
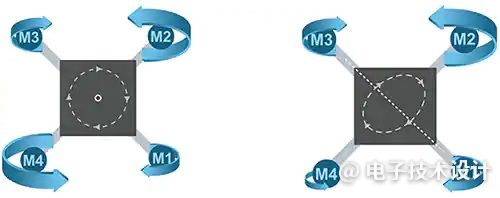
图3:无人机使用不同的旋翼速度组合来执行机动。(图片来源:ST)
如果改变头部(或尾部)旋翼的速度,无人机将像固定翼飞机俯冲一样指向上方或下方。左侧或右侧扭矩调整会导致无人机滚动,使其绕轴旋转。为了达到完成期望机动所需的飞行高度,需要靠无人机的飞行控制系统来改变适当的旋翼速度。
对于控制工程师来说,速度校正是一种常见的控制回路反馈问题,可以通过比例积分微分(PID)控制器来解决。
为无人机设计电调需要专门设计用于控制高转速电机(12,000RPM以上)的高质量元器件。德州仪器(TI)开发了InstaSPIN系列MCU,其可用来简化三相电机控制应用的设计。InstaSPIN-FOC适用于无传感器系统,具有适用于任何三相电机的带扭矩和速度控制功能的快速软件编码器。InstaSPIN-MOTION则针对无传感器系统而设计,它可为任何三相电机提供位置、速度和扭矩控制。
TI为上述应用提供了完整的参考设计,包含InstaSPIN-FOC和InstaSPIN-MOTION电机控制技术。该平台包括一个32位TI C2000 InstaSPIN MCU。借此,开发人员就可以对三相电机进行识别、自动调整和控制,从而快速提供稳定且功能强大的电机控制系统。
意法半导体(ST)也提供了完整的电调参考设计,借此就可实现无传感器FOC算法。STEVAL-ESC001V1电调参考设计适用于入门级商用无人机设计,可用来驱动由6S锂聚合物电池组或任何等效直流电源供电的任何三相无刷电机(或PMSM),峰值电流高达30A。借助完整的预配置固件包(STSW-ESC001V1),设计人员就可利用STEVAL-ESC001V1快速开发他们的应用,实现具有三分路电流读数、速度控制和完全有源制动的无传感器磁场定向控制算法。STSW-ESC001V1固件/软件包加上STM32 PMSM FOC软件开发套件电机控制(MC)库,可用来通过作用于嵌入在STM32 MCU中的FOC参数优化电调设计,并利用ST电机分析器快速检索相关电机参数。ST的无传感器FOC算法可适用于任何三相BLDC或PMSM电机应用,并提供更长的飞行时间和最佳的动态性能(图4、图5、图6和图7)。
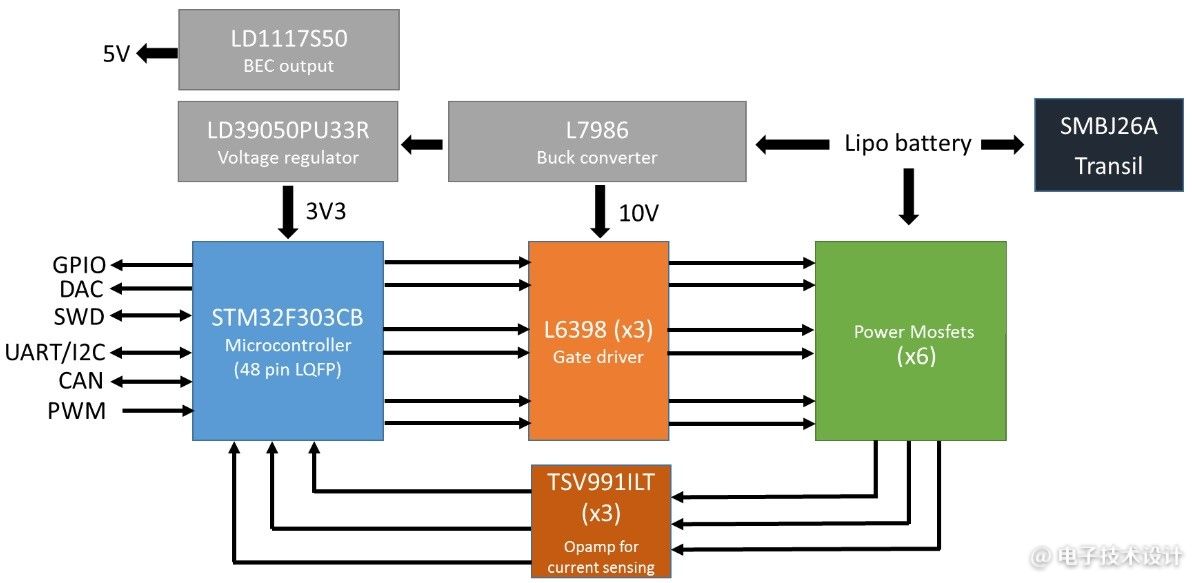
图4:ST STEVAL-ESC001V1解决方案框图。(图片来源:ST)
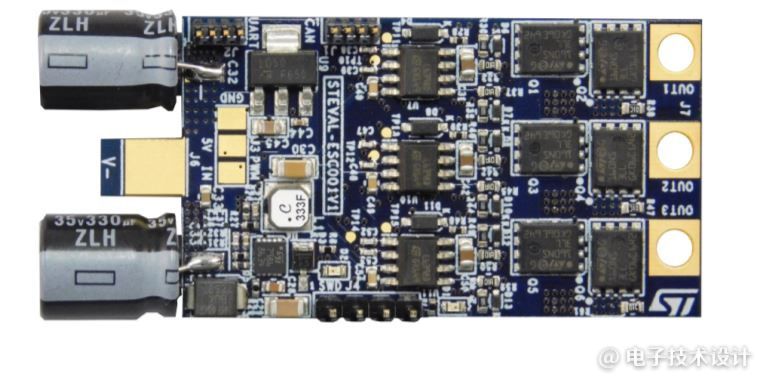
图5:ST的STEVAL-ESC001V1板。(图片来源:ST)
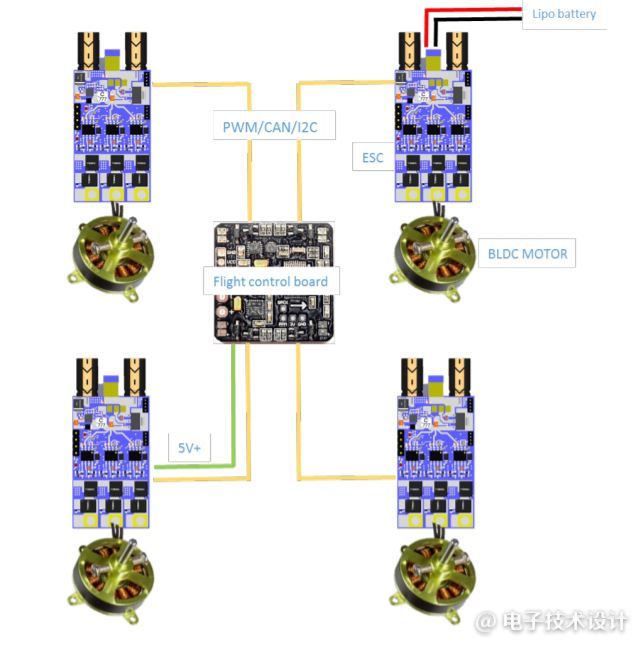
图6:STEVAL-ESC001V1板的系统结构概览。(图片来源:ST)
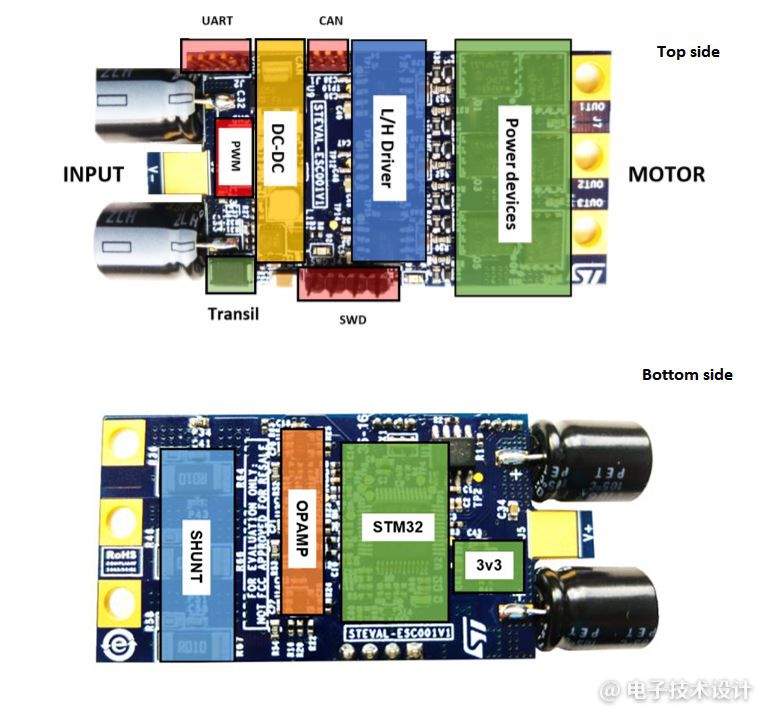
图7:STEVAL-ESC001V1板详细信息。(图片来源:ST)
恩智浦(NXP)的HoverGames无人机开发平台,是一种模块化的灵活的硬件/软件解决方案,可用于构建任何类型的无人机。该开发套件本质上基于一个带有Linux和Open CV的微处理器,以及各种用于引导飞行的随附的传感器(图8)。
该飞行控制器可用来确保无人机保持稳定。该电路板是开源的,可以插入其他外部传感器以根据功能优化操作。
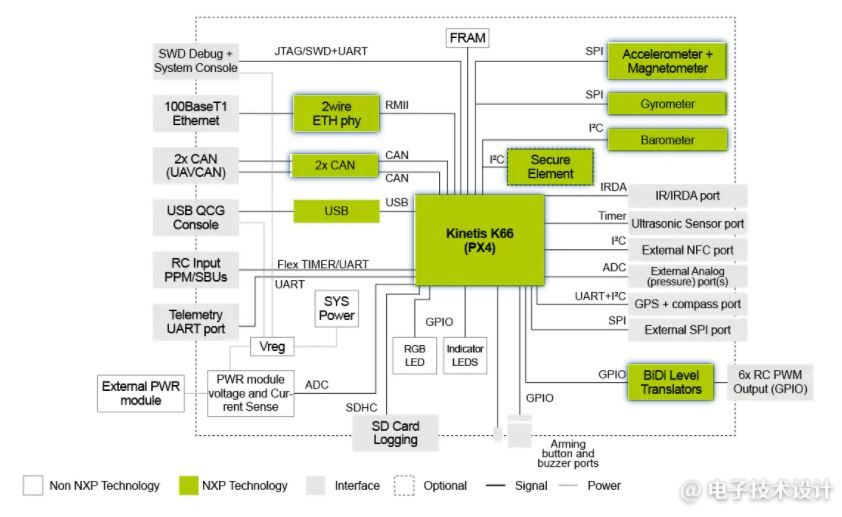
图8:RDDRONE-FMUK66飞行单元框图。(图片来源:NXP)
此外,还需要单独的锂聚合物电池和特定国家/地区的遥测无线电。要获得该套件的全部功能,需要选择购买两种可用的遥测无线电中的某一个。通过遥测,可以在飞行过程中与车辆实时连接,并可以在飞行过程中查看无人机的状态、加载和控制自主航路点并进行任何必要的更改。遥测数据会发送到控制站,但也会存储在飞行单元中。
套件元器件还包括DC-DC电源模块、带支架的GPS NEO-M8N模块、安全开关、蜂鸣器、明亮的RGB状态LED、SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3电缆/带电缆的调试分线板、BLDC无刷电机2212 920kV和ESC电机控制器40A OPTO(图9)。
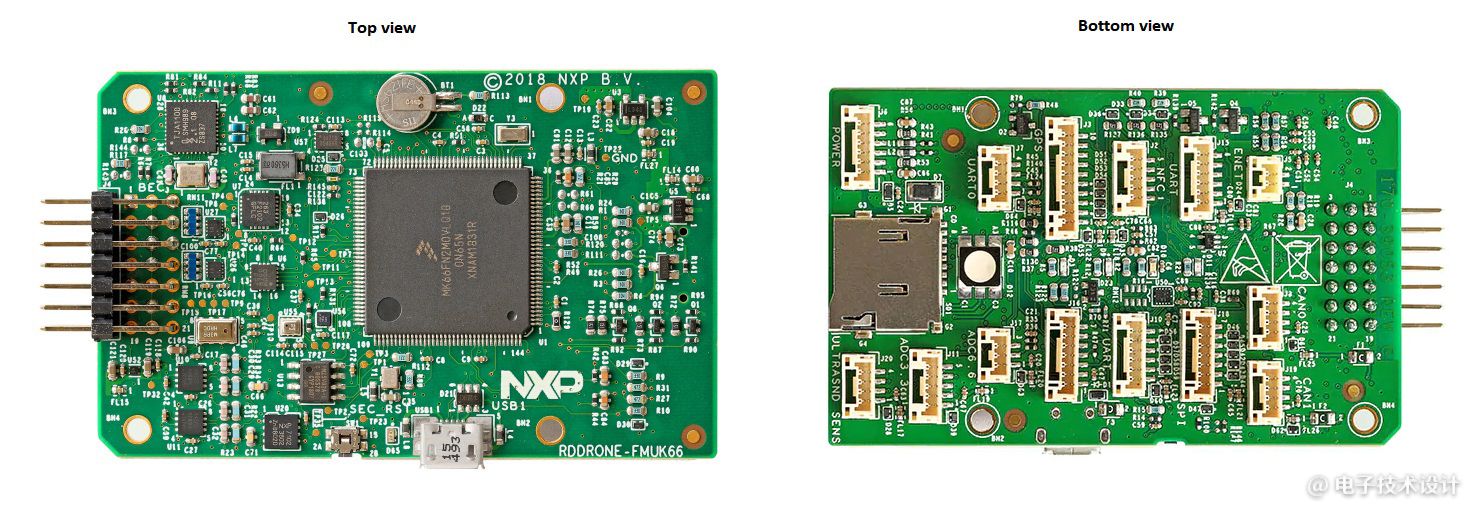
图9:RDDRONE-FMUK66飞行单元顶视图和底视图。顶视图左侧是串行接口,中间是Kinetis处理器。(图片来源:NXP)
(原文刊登于EDN姐妹网站EEWeb,参考链接:Design Fundamentals for Drone Motor Controller,由Franklin Zhao编译。)
本文为《电子技术设计》2022年9月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。
 最前沿的电子设计资讯
最前沿的电子设计资讯

