
高性能电机需要一种控制机制,以确保提高平稳性、可靠性和效率。这种应用最恰当的例子之一是电动汽车(EV)动力系统中使用的电机,这种电机可以由基于磁场定向控制(FOC)的系统控制。
为了使电动汽车动力系统平稳行驶,控制方案应使电机能够在较宽的速度范围内运行并在最低速度下产生最大扭矩。从技术上讲,电机控制必须基于转矩和磁通量,因此可以通过控制电流来精确控制转矩。
电机转子旋转的基本原理是在定子中产生磁场,这是通过用交流电激励定子线圈来完成的。电机平稳运行的秘诀在于知道转子的位置,即转子磁通轴与定子磁轴之间的夹角。一旦知道这个值,就可以使定子电流与转子的转矩轴对齐。为了达到峰值效率,定子磁通量必须垂直于转子磁通量。
典型的基于磁场定向控制(FOC)的电机控制系统如图1所示。
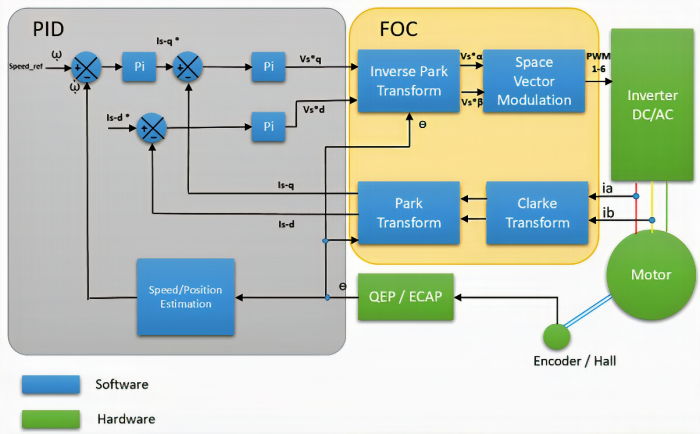
图1:基于FOC的电机控制系统的硬软件组件。(图片来源:德州仪器)
让我们了解下每个软件和硬件组件:
接下来将探讨如何使用FOC算法将这些组件用于驱动电机。
对于要控制的三相电机,必须通过读取相电流Ia、Ib和Ic来为电机提供适当的电压。如果不对它们进行控制,就不可能创建与转子磁通矢量成90°的定子磁通矢量。
FOC是一种数学密集型算法,可以帮助轻松实现这一目标,而且更容易实现,但开发FOC非常复杂。FOC算法能够通过将三相正弦电流参考系分解为磁通和转矩(d-q)参考系来简化对三相正弦电流参考系的控制。这两个分量可以单独控制。
图1显示了确定转子位置并将其传递给速度/位置模块的编码器/霍尔传感器。这个值也会被馈送到Park和逆Park变换模块。同时,还会将来自电机的相电流(ia和ib)馈送到Clarke变换模块。来自电机的相电流通过Clarke变换转换为两个正交电流(iα和iβ)。新转换的相电流现在分别表示产生转矩和产生磁通的电流。尽管已经成功地将相电流分解为磁通和转矩分量,但它们仍然是正弦的,这使得它们在不断变化时难以控制。
FOC算法的下一个任务是消除正弦波,这需要一个重要的输入——转子位置。如图所示,这个值也被馈送到Park变换模块。在这个模块中,诀窍是从一个静止参考系(从定子的角度来看)移动到一个旋转参考系(从转子的角度来看)。简单来说,Park变换模块用于将两个交流电流(iα、iβ)转换为直流电流。这使得PID模块很容易按照它希望的方式对其进行控制。
现在来看PID模块。从FOC模块到PID模块的输入是Iq和Id,即转矩和磁通分量。在电动汽车环境中,当驾驶员操作油门时,PID模块用于接收速度参考值。现在PID模块就会比较这两个值并计算误差。PID模块必须要获得这个误差才能使电机旋转。PID模块给出的输出是Vq和Vd。这两个输出会到达Clarke和Park逆变换,其中会发生与Clarke和Park变换完全相反的情况。逆Park变换块将旋转参考系转换为静止参考系,以便它们的电机相位可以换相。
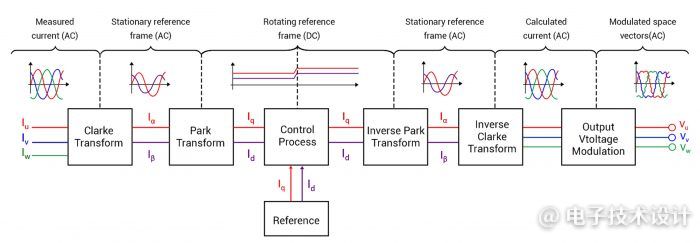
图2:PID输出到达Clarke和Park逆变换,其中发生与Clarke和Park变换完全相反的情况。(图片来源:德州仪器)
在基于FOC算法的电机控制的最后一步,空间矢量调制的作用非常重要。空间矢量调制的作用是生成PWM信号并将其馈入到逆变器,进而生成驱动电机的三相电压。在某种程度上,空间矢量调制也完成了Clarke逆变换的工作。
三相逆变器有六个晶体管,用于将输出电压传送到电机。这些输出基本上有两种状态,必须要在顶部晶体管关闭时才能将底部晶体管打开,反之亦然。通过两个状态和三个输出,可以计算出总共八个状态(23)。当在六角星图上绘制这八个状态(也称为基向量)时,可以发现每个相邻向量在相位差方面相距60°。空间矢量调制可求出给定输出电压(Vout)的平均向量。
FOC作为一种电机控制方案,对电动汽车设计来说必不可少。考虑到电动汽车需要无噪声、平稳的电机操作,FOC就非常适合。许多OEM厂商和控制系统开发商经常会调整标准FOC算法,以便适应其电动汽车程序的独特要求,但核心概念保持不变。
汽车级MCU的进步,例如Microchip公司的PIC18Fxx39系列MCU或德州仪器(TI)的C2000实时MCU,能够加快电动汽车电机控制系统的FOC算法的开发。
作者:Vaibhav Anand和Saurabh S. Khobe,Embitel公司
(原文刊登于EDN美国版,参考链接:Field-oriented-control algorithm enhances motor control in EV designs,由Franklin Zhao编译。)
本文为《电子技术设计》2022年9月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。
 最前沿的电子设计资讯
最前沿的电子设计资讯
