
农民们通过收集传感器数据,将农业工作从预防转变为预测。
工业革命自开始以来,其重心一直是使生产过程自动化。现在我们进入了工业4.0时代,大多数工业过程已经以数据为中心了,这些过程通常涉及五个数据操作步骤:收集、传输、存储、分析以及最终显示。最后一步是为了让人继续参与其中,当然数据也可以被发送到某些执行装置,从而将整个过程完全交给机器人。
在过去的两个世纪中,农业不可避免地受到工业化的影响,并且近年来农业4.0发展势头强劲(图1)。随着在工业生产中逐步采用数据管理,农业发展也紧随其后。过去服务于工业领域的公司,现在也向农业部门提供以数据为中心的方案,我们甚至看到农业设备制造商进入了工业设备制造领域。相对于传统的工业制造行业而言,农业通常具有非结构化的环境特征,但是以数据为中心的技术具有多样性,使农业可以像汽车和航空行业一样,成为这一技术的又一个试点行业。农民都可以变成工程师。

图1:在过去的两个世纪中,农业不可避免地受到工业化的影响,近年来农业4.0发展势头强劲。
这一趋势始于90年代,最初是在高价值乳制品行业中使用自动化设备(主要是来自瑞典制造商DeLaval和荷兰Lely等企业的挤奶机)。同时,总部位于日本的Satake和瑞士的Bühler等公司也研发出谷物(特别是大米)的光学分拣机,这些分拣技术最终又回到了农田里,用于出品高端农产品(例如葡萄园的葡萄)。法国南部的Pellenc研发了一种机器人设备,农民成为了数据科学家。
的确,一旦帮助新一代农民实现了自动化,他们就可以更进一步,从被动地接受产量数据,变为主动采取行动来提高农产品的质量和数量。过去的小规模农耕是依靠农民的观察和直觉来监控日常活动,如今的大规模农耕不能再依靠人类的判断,数据技术已成为正确指导农业的关键。无论是用于畜牧业、农业生产,还是用于葡萄酒等高端生产,数据都是农业4.0的关注重点。
在农业数据管理中,一个最好的例子是使用无人机监控农田。巴黎的Parrot公司利用其美国子公司MicaSense开发的摄像机,成为这一领域的重要参与者。但是这家法国公司已在一月份宣布将MicaSense卖给AgEagle Aviation(总部位于美国的数据收集、分析、航空影像服务和无人机公司),交易价格为2300万美元。MicaSense的摄像机可以使用不同波长计算出归一化植被指数(NDVI)图,这已成为公认的监控作物生长和发现问题区域的方法,现在最先进的方法是将NDVI图下载到拖拉机上,据此调整输送到田间的肥料。
美国联邦航空管理局(FAA)最近报告说,在美国注册的160万架无人机中,有7%是用于农业的,也说是说,美国目前有超过100,000架农用无人机。虽然在整个商用无人机市场中,这只不过占了一小部分,但农业无人机市场已成为一个重要的创收来源。数据收集将渐渐成为机器人的任务。无论是对于自动化谷仓、农用无人机还是自动驾驶拖拉机,数据都不再是新的原料,而是新的产物。图2的数据表明机器人在农业中的应用逐年增加。
智能农业中使用的机器人分为两大类:空中机器人(无人机)和陆地机器人(如拖拉机和收割机)。在这两种情况下,机器人的工作都依赖于各种类型的传感器。例如,机器人需要利用惯性系统进行导航和自身稳定,惯性系统必须满足高性能、高可靠性和高准确性的要求,还应具有低偏置漂移和低零偏不稳定性,而且性能不能受温度的影响。
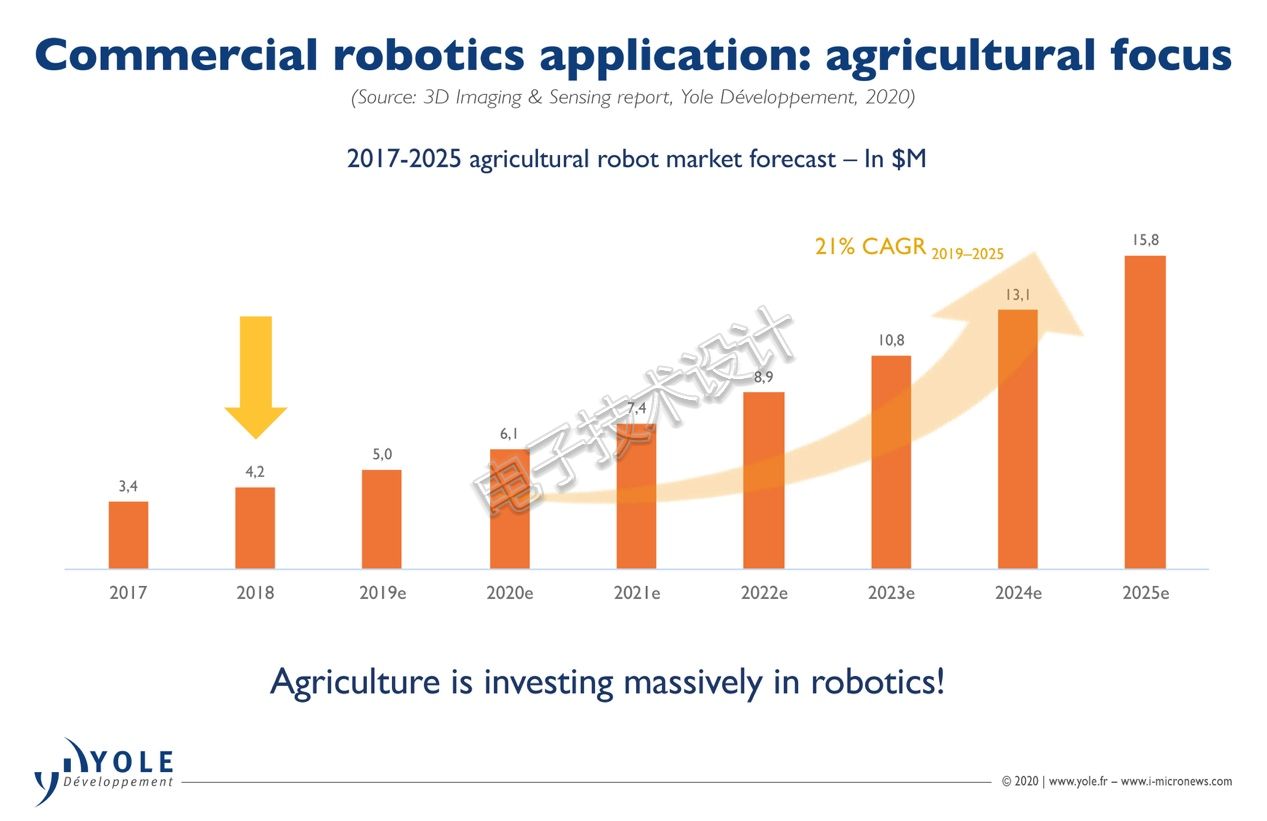
图2:机器人在农业中的应用逐年增加。(图片来源:Yole Développement)
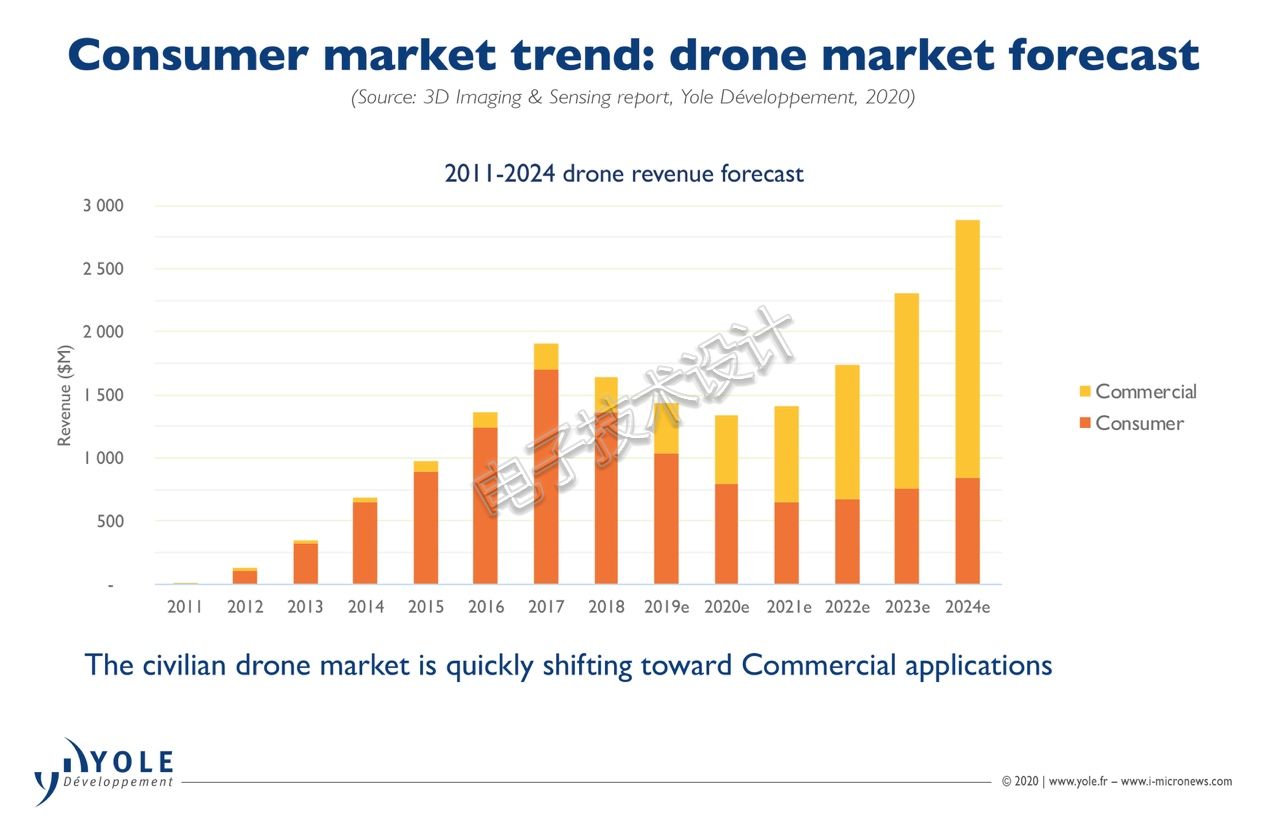
图3:无人机市场预测。(图片来源:Yole Développement)
无人机可通过摄像机监控农田的健康状况,它们还经常被用来给中小型农田(小于20公顷)施肥,以代替成本更高的飞机施肥。无人机的摄像机对准地面时,其导航和稳定性非常重要,因为摄像机拍摄的画面必须准确。在10米的高度,摄像机5°的偏差会导致拍摄画面产生80厘米的误差。图2为无人机市场预测数据。
尽管GPS能足够精确地进行无人机导航,但摄像机的稳定性仍需要强健的惯性测量单元(IMU)来保证。
用于农业生产的陆地机器人车辆要在成排的庄稼中穿行,所以它们需要达到厘米级的精度,以免损坏农作物。大多数机器都配有精确的GPS系统,使驾驶员知道车辆的位置,以防给庄稼施肥时重复或遗漏。但是,GPS在某些情况下(例如机器人行驶到树下)会丢失信号,这时就需要用到IMU或“姿态航向参考系统(AHRS)”了。基于微机电系统(MEMS)的IMU完全可以满足陆地应用的高性能、小尺寸、低重量、低功率和低成本(SWAP-C)需求。
(原文刊登于EDN姐妹网站EETimes美国版,参考链接:Data Drives Agriculture 4.0,由Jenny Liao编译。)
本文为《电子技术设计》2021年8月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。
 最前沿的电子设计资讯
最前沿的电子设计资讯
