
(封面图是印象派大师马奈的作品《白牡丹花》,马奈可以说是印象派的开创者之一,但他比较穷,时不时还需要他的死党富二代莫奈接济一波,方可度日,但不妨碍他对绘画的热爱。马奈受到日本浮世绘的影响,并且大胆抛弃了传统透视绘画准则,并在绘画内容上呈现出更多的世俗化与平民化,引领了印象派的发展。)

首先我们做个回顾,我在((加餐)雷达信号处理框架)中初步介绍了针对fast ramp的毫米波雷达信号处理框架,主要是range-Doppler-Angle,以及range-Angle-Doppler两种,其中经典信号处理流程中Angle一般指Azimuth。并且,我也在((加餐)从车载雷达认识傅里叶变换)中初步介绍了:我们关心的径向距离,径向速度,方位角估计问题在满足一定条件下都可等价为各自独立频率的估计问题,也就是说,如果我们依次完成相应频率的估计,雷达信号处理最核心的工作也就完成了。在((加餐)从车载雷达认识傅里叶变换)中还介绍了,在加性高斯噪声下,利用傅里叶变换估计上述频率在最大似然条件下是最优的,这也是我们利用傅里叶变换的主要原因。另外,对于range-Angle-Doppler框架下,介绍了利用Capon方法估计方位角/俯仰角,这也是目前常用的方法。
这期在此基础上进一步扩展加深,分析讨论适合4D高分辨雷达的信号处理框架。
这次介绍两种高级框架,希望对你有所收获,引起你的思考。
框架1,4D FFT
我在(如何做好一款4D毫米波雷达)中提过,4D毫米波雷达的输出点云在数量及质量上远远高于传统毫米波雷达,数量指标很好理解,怎么理解雷达点云质量呢?事实上,它也是由多个维度决定的,其中一个重要维度就是高动态范围(High Dynamic Range,HDR),简单理解,所谓HDR就是雷达既能够检测强反射目标(比如大卡车),也能够稳定检测路边玩泥巴的小朋友,这还不够,更有意思的是能够检测在大卡车旁边玩泥巴的小朋友,这通常是非常困难的,传统毫米波雷达很难做到稳定检测,更别提稳定跟踪,对于4D雷达,这是要解决的问题。CES2021上,Mobileye介绍了其4D成像雷达技术要点(如图1),其中就着重强调了高动态范围的重要性,宣称做到60dB的高动态范围,图2也展示了Mobileye的HDR演示demo,demo成功跟踪了一辆车旁边行走的两个成人。
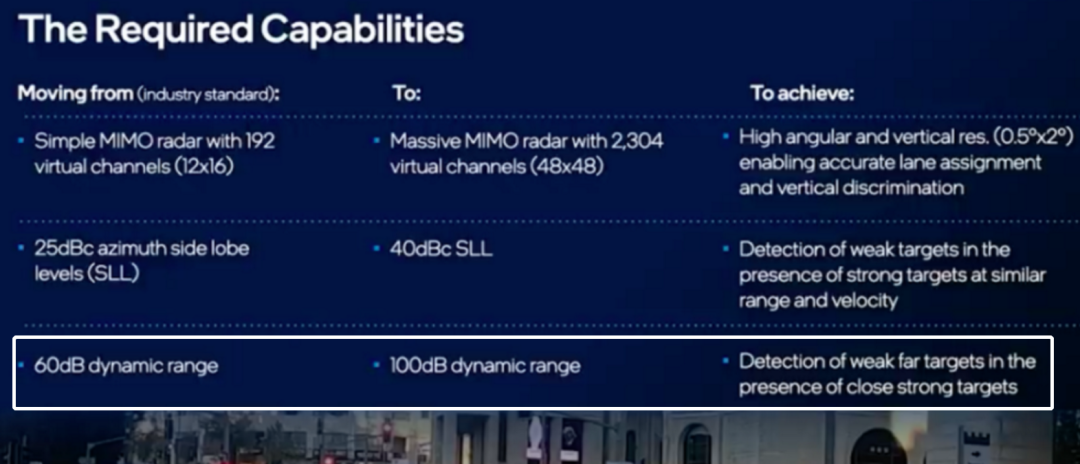

图2 Mobileye Radar HDR demo
4D雷达如何做到HDR?
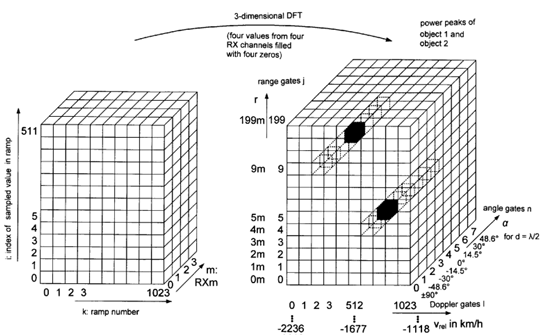
方法很多,从天线,硬件,软件,算法各个层面都有挤牙膏空间。我就从信号处理算法架构设计层面讨论如何提高HDR。玩泥巴的小朋友之所以难以检测,原因之一就是其反射电磁波能量过低,那么思路之一就是能否依赖处理增益提高对弱反射目标的检测能力,当然是可以的,我们知道处理增益分为相干处理增益以及非相干处理增益,举个简单例子,比如雷达采用8通道,128个chirp,每个chirp256个采样点,以range-Doppler-Angle架构为例,我们在range-Doppler map上搜索目标点的时候,本身每个目标点是获得128*256相干处理增益以及sqrt(8)的非相干处理增益,所以整体获得了128*256*sqrt(8)的处理增益。
这样的结果还不错,对于传统毫米波雷达差不多够用了,那么对于4D雷达我们认为还有思考空间,比如sqrt(8)能否演进为8,天线数目多了,这两者差距还是有的。是的,我们可以完全抛弃range-Doppler map搜索机制,在2D FFT基础上直接做3D FFT乃至4D FFT(获得俯仰角),以期获得更高的处理增益,从而提高弱小目标的检测能力。
当然,4D FFT框架有助于HDR,但实施4D FFT本身有些限制条件,比如,TDM-MIMO本身不适合直接上4D FFT,原因我在(4D雷达之MIMO通道分离)中提过。但这并不能否定4D FFT的价值,我们目前也通过合理的技术手段妥善解决了前述限制条件和问题。
也分享下4D FFT框架的processing chain,如图4。
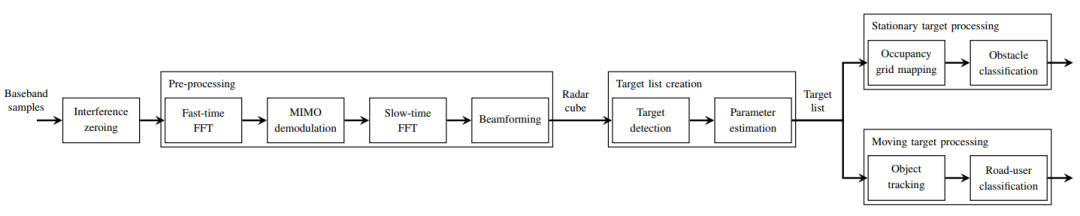
图4 4D FFT processing chain
如图4,多通道ADC数据,也就是baseband samples经interference zeroing进入pre-processing模块,其中interference zeroing主要用于radar-to-radar interference mitigation,也就是常说的抗雷达间干扰。在pre-processing模块中,依次进行了各个维度的FFT,其中Fast-time FFT对应1D FFT,Slow-time FFT对应2D FFT,Beamforming中包含了3D FFT乃至4D FFT,最终得到4D radar cube, 基于此cube,计算Target list,可以说基于此方式获得的处理增益是最高的。
框架2 ASRP(Adaptive Super Resolution Processing)
1 次序问题
首先,我们清楚多通道ADC输出数据构成radarcube数据,并且基于range-Doppler-Azimuth次序,或者range-Azimuth-Doppler 次序求解各个频率,那么这里大家是否思考过几个问题,比如,这三个量的次序是怎么决定的,能否实施类似Doppler-Azimuth-range次序,这些问题非常重要。文章开头我也提过,表征目标属性(距离,速度,方位角)的三个频率是解耦独立的,这是次序调换可操作性的基础,Doppler-Azimuth-range的方式当然也是可以的。问题是要清楚次序影响什么?
2 分辨率问题
次序影响目标分辨。
我们按经典流程通过搜索得到某个检测点,但是我们并不知道该检测点是真的单一检测点,还是在某一维度存在多目标,只不过无法分辨,最后只输出一个点。比如基于range-Doppler map搜索目标点,然后求解方位角。相同速度,相同距离条件下,不同角度的目标可能有多个,但是由于孔径原因,这些目标可能在方位角维度不好分辨,往往只形成一个峰值,传统车载雷达是几乎不考虑这个问题的,直接输出该峰值所表征的角度即可,也就是只输出一个目标。
举个例子,假设雷达角度分辨率是15度,那么对于距离,速度都相同,角度分别是0°和7°的两个点,最后雷达的输出可能就是角度4°的一个点。对于经典处理流程,输出该点也就完事了,但对于4D雷达,这是不够的,我们需要考虑,能否求解0°和7°,当然你会认为可以直接使用超分辨算法(比如单快拍ML)就好,哪有这么麻烦,这么做当然可以,不过我们有更有意思的思考。并且需要提醒,超分辨算法就像小智的喷火龙,用的好,主宰全场,用的不好,自取灭亡,车载应用当慎之又慎,不到万不得已,还是别用为好。
回到次序问题,如果多目标在距离,速度,角度任意一个或多个维度在傅里叶谱上是可分辨的,那么暂不需要考虑次序问题,这就回到经典处理流程的范畴;如果目标在距离,速度,方位角都不可分辨,那么就需要考虑次序问题了。因为当目标在傅里叶谱不可分辨的时候,我们可以定量分析每个维度不可分辨的程度,然后依据不可分辨的程度在不可分辨维度中选取最容易超分辨的维度。这样一方面最大限度的降低对超分辨算法的依赖,另一方面能够大幅度提高点云数量及质量。
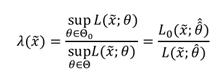
那么这里需要基于实际检测环境自适应定量分析每个维度不可分辨的程度,从而判断选择哪个次序,一种定量分析机制是GLRT。
当然也有其他机制,大家有兴趣可以研究。在这举个例子,比如某几个目标在距离,速度,方位角都不可分辨,但是range不可分辨的程度最小,也就是说range维度在所有维度中最容易超分辨,那么采用doppler-azimuth-range即可,这要比直接使用range-doppler-azimuth方式更能提高点云数量及质量。
下期见 。
。
[1] Sujeet Patole, Murat Torlak, Dan Wang,and Murtaza Ali, "Automotive radars A review of signal processingtechniques", in IEEE SIGNAL PROCESSING MAGAZINE,March 2017.
 最前沿的电子设计资讯
最前沿的电子设计资讯
