
(封面图是现代绘画大师夏加尔的作品,夏加尔老爷子的画往往勾勒出一个神秘,而又冷峻悲凉的,极富个人色彩的超现实主义世界,这与他的个人经历有关,当然也受到了印象派(比如梵·高,高更),野兽派的影响,我有幸看过他的“马戏团”,拍的照片如图1,大家也可以品味下老爷子丰富的内心世界!)
 图1 马戏团(Marc Chagall) 好久不见
图1 马戏团(Marc Chagall) 好久不见 ,这期聊聊车载雷达领域波束赋形技术演化小史,从中反映出人们对车载雷达领域角度求解问题不断探索的过程,也是在不断追求更高的角度分辨率及角度精度的过程。重点将分享MIMO,相控阵(Phased-Array)以及相控MIMO(Phased-MIMO)这三个技术在车载领域逐步发展的过程。这期算是开胃菜,由于上述三个技术手段的重要性,下期将从理论层面进一步分析MIMO, Phased-array以及Phased-MIMO,这将扩展我们对车载雷达角度域分析的手段与认知,希望对你有所收获。 角度求解可以说是车载雷达算法最让人操心也是最有意思的环节,如今我们不假思索能够直接基于MIMO技术改善角度估计分辨率及精度,那无非是前人栽树后人乘凉的结果。前辈们对车载雷达该如何测角,获得期望的角度精度,进行了长期摸索与尝试。 早期的雷达(车载雷达一代目,1970s)几乎没有波束赋形的概念,能探测到目标就不错了,也不图个啥,如图1,实验雷达尺寸还比较大,还完全处于摸索阶段,形成不了产品。但确实是milestone,至少验证了雷达技术应用于车载的可能性。
,这期聊聊车载雷达领域波束赋形技术演化小史,从中反映出人们对车载雷达领域角度求解问题不断探索的过程,也是在不断追求更高的角度分辨率及角度精度的过程。重点将分享MIMO,相控阵(Phased-Array)以及相控MIMO(Phased-MIMO)这三个技术在车载领域逐步发展的过程。这期算是开胃菜,由于上述三个技术手段的重要性,下期将从理论层面进一步分析MIMO, Phased-array以及Phased-MIMO,这将扩展我们对车载雷达角度域分析的手段与认知,希望对你有所收获。 角度求解可以说是车载雷达算法最让人操心也是最有意思的环节,如今我们不假思索能够直接基于MIMO技术改善角度估计分辨率及精度,那无非是前人栽树后人乘凉的结果。前辈们对车载雷达该如何测角,获得期望的角度精度,进行了长期摸索与尝试。 早期的雷达(车载雷达一代目,1970s)几乎没有波束赋形的概念,能探测到目标就不错了,也不图个啥,如图1,实验雷达尺寸还比较大,还完全处于摸索阶段,形成不了产品。但确实是milestone,至少验证了雷达技术应用于车载的可能性。  图2 早期车载雷达实验 车载雷达早期的商业化探索由博世公司(Bosch GmBH)及大陆集团(Continental AG)主导。大陆在1996年左右布局及研发长距离雷达,1999年正式向市场投放24GHz LRR,当时搭载这款雷达的典型车型就是Daimler Mercedes-Benz S W220,用作自适应巡航(ACC)(事实上结合当时的技术及安全考虑,也只支持ACC),该雷达据说采用了机械扫描求解角度。 基本上最早的波束赋形技术形态是机械扫描(Mechanical Scanning),基本原理如图2,雷达通过窄波束机械扫描覆盖真个FoV,一圈扫下来也得50-200ms,波束宽度控制在2度左右,扫描步进1度左右。记录每个角度位置目标的能量值,大致可以获得角度估计值。
图2 早期车载雷达实验 车载雷达早期的商业化探索由博世公司(Bosch GmBH)及大陆集团(Continental AG)主导。大陆在1996年左右布局及研发长距离雷达,1999年正式向市场投放24GHz LRR,当时搭载这款雷达的典型车型就是Daimler Mercedes-Benz S W220,用作自适应巡航(ACC)(事实上结合当时的技术及安全考虑,也只支持ACC),该雷达据说采用了机械扫描求解角度。 基本上最早的波束赋形技术形态是机械扫描(Mechanical Scanning),基本原理如图2,雷达通过窄波束机械扫描覆盖真个FoV,一圈扫下来也得50-200ms,波束宽度控制在2度左右,扫描步进1度左右。记录每个角度位置目标的能量值,大致可以获得角度估计值。 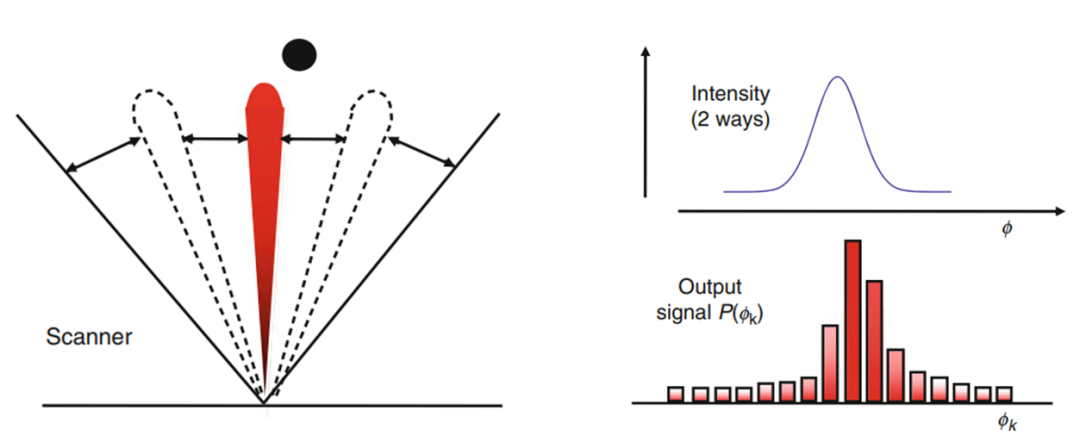 图3 机械扫描原理 大陆之后将该技术逐渐发展成熟,后来用机械扫描技术的典型代表是Continental ARS 300(如图4),问世于2009年。原理不再阐述,感兴趣的参考文献[1],需要指出的是,机械扫描带来较长的波束扫描周期,而为了保证整个处理周期不能太长,所以不能发送太多的chirp,我们知道chirp数目较少会降低速度分辨率及精度,因而机械扫描在车载雷达上应用往往速度维参数不太理想,比如ARS 300在保证了66ms处理周期条件下,仅仅获得1.53m/s(NRS)/0.77m/s(FRS)的速度分辨率。而且这还是在扫描范围不大的条件下,像ARS 300远扫保持17度,近扫只有56度,这只能说差强人意,不过在当时的技术条件下,ARS 300已经是足够优秀的雷达产品。
图3 机械扫描原理 大陆之后将该技术逐渐发展成熟,后来用机械扫描技术的典型代表是Continental ARS 300(如图4),问世于2009年。原理不再阐述,感兴趣的参考文献[1],需要指出的是,机械扫描带来较长的波束扫描周期,而为了保证整个处理周期不能太长,所以不能发送太多的chirp,我们知道chirp数目较少会降低速度分辨率及精度,因而机械扫描在车载雷达上应用往往速度维参数不太理想,比如ARS 300在保证了66ms处理周期条件下,仅仅获得1.53m/s(NRS)/0.77m/s(FRS)的速度分辨率。而且这还是在扫描范围不大的条件下,像ARS 300远扫保持17度,近扫只有56度,这只能说差强人意,不过在当时的技术条件下,ARS 300已经是足够优秀的雷达产品。 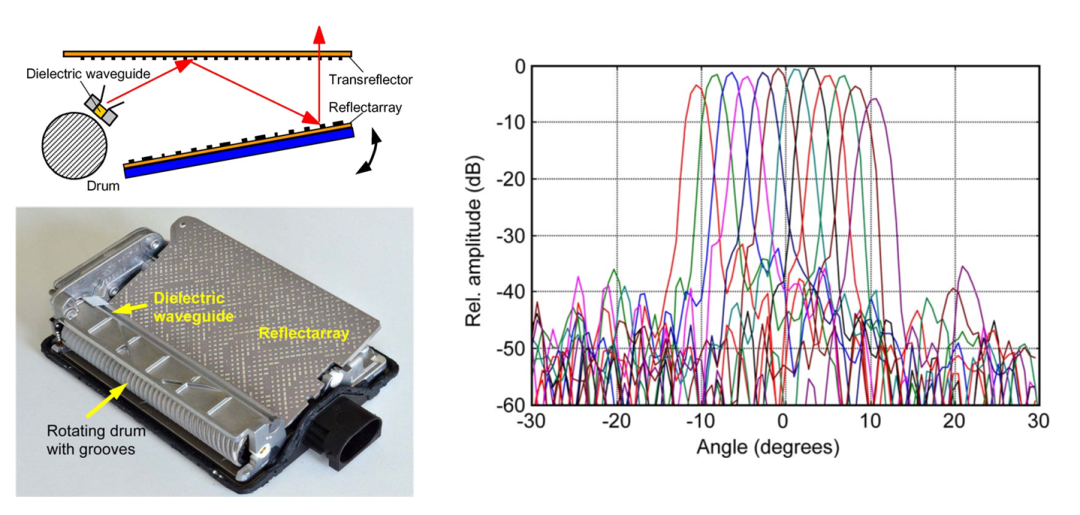 图4 ARS 300 2010年之后,以DBF(digital beamforming)为代表的数字波束赋形技术在车载雷达上逐渐兴起,不过这时候还是以24GHz为主,并且单发多收的体制较为多见(单发多收问题暂不讨论),而MIMO结合接收端DBF的技术路径因其出众的效果也逐渐广泛采用,比如Continental SRR200系列,于大概2012年推出,借助于MIMO,通过收发等效产生虚拟孔径(原理如图6所示,对此感兴趣的朋友也可以看看(4D雷达之MIMO通道分离),角度分辨率达到14度。后来又出现了MIMO加稀疏阵形式,这是非常有意思的研究点,以后详细聊聊。
图4 ARS 300 2010年之后,以DBF(digital beamforming)为代表的数字波束赋形技术在车载雷达上逐渐兴起,不过这时候还是以24GHz为主,并且单发多收的体制较为多见(单发多收问题暂不讨论),而MIMO结合接收端DBF的技术路径因其出众的效果也逐渐广泛采用,比如Continental SRR200系列,于大概2012年推出,借助于MIMO,通过收发等效产生虚拟孔径(原理如图6所示,对此感兴趣的朋友也可以看看(4D雷达之MIMO通道分离),角度分辨率达到14度。后来又出现了MIMO加稀疏阵形式,这是非常有意思的研究点,以后详细聊聊。 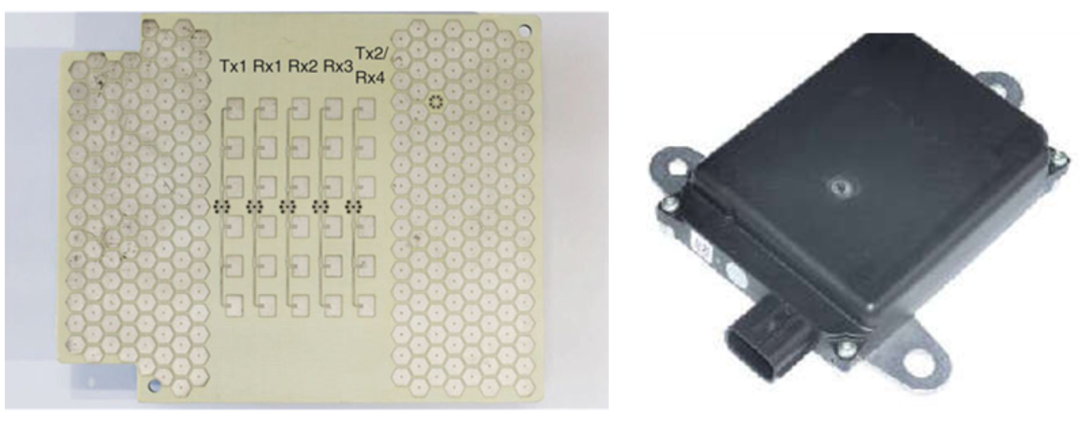 图5 ARS 200
图5 ARS 200 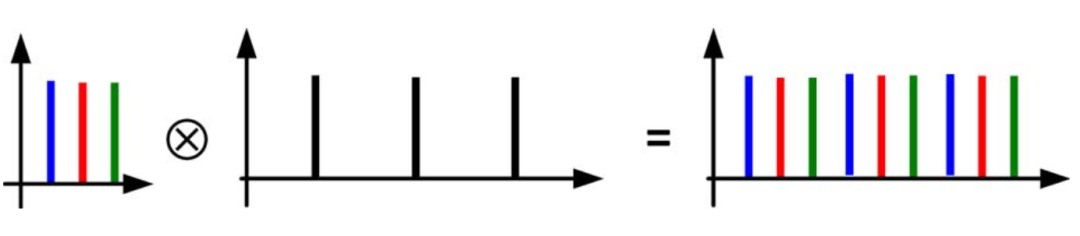 图6 MIMO 等效阵列示意 相控阵技术往往依赖于多发送通道,而车载雷达在这方面往往达不到要求,目前主流也就是2发-4发。而2018年之后,TI公司推出的基于多芯片级联方案高分辨雷达,在TX Beamforming也就是Phased-Array方面进行有益探索。由于多芯片带来的较多发射通道,TX Beamforming也就可以做了,基于此技术,TI实现了车辆检测超过350m,行人也达到了150m,角度分辨率低于1°,可以说相当出彩了,只不过这雷达离量产估计还比较远。
图6 MIMO 等效阵列示意 相控阵技术往往依赖于多发送通道,而车载雷达在这方面往往达不到要求,目前主流也就是2发-4发。而2018年之后,TI公司推出的基于多芯片级联方案高分辨雷达,在TX Beamforming也就是Phased-Array方面进行有益探索。由于多芯片带来的较多发射通道,TX Beamforming也就可以做了,基于此技术,TI实现了车辆检测超过350m,行人也达到了150m,角度分辨率低于1°,可以说相当出彩了,只不过这雷达离量产估计还比较远。 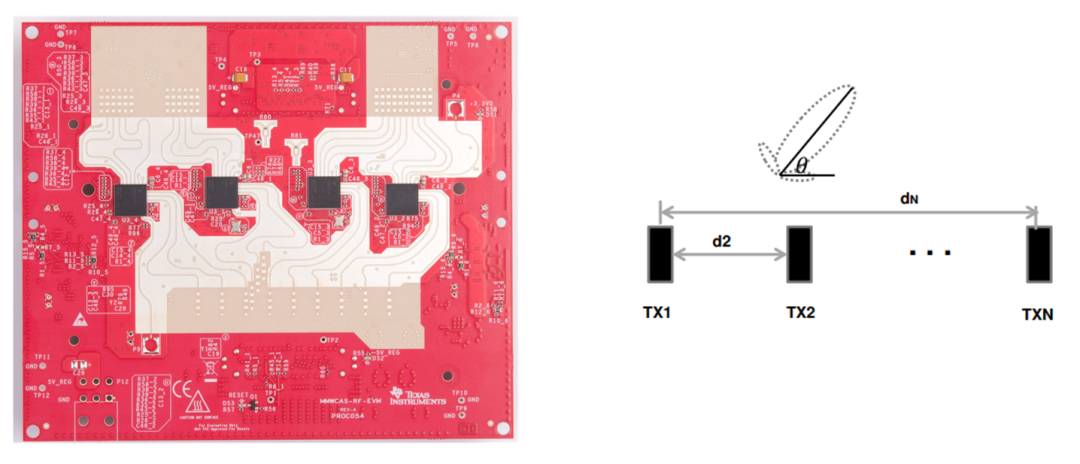 图7 TI AWR2243 cascaded Radar(TXBeamforming) 其实在军事领域,相控阵发展要远早于MIMO雷达(20实际30年代就已经出现相控阵技术,MIMO雷达要到21世纪才正儿八经研究),而车载方面受限因素比较多,TX Beamforming技术即使理论成熟也没有发展的土壤,反倒车载雷达端MIMO技术实现所需条件没那么苛刻,包括收发多通道,远场,窄带等条件都能基本满足。 我们知道,MIMO雷达是舍弃coherent gain而只保留波形的分集增益(diversity gain),而Phased-Array 则恰恰相反只保留coherent gain而舍弃波形的分集增益。这两者在数学上是等价的,那么如果将两者融合呢,也就是即保留coherent gain又保留分集增益,这种技术就是Phased-MIMO,该技术理论部分在2010年之后快速发展,但实际上目前商用的许多毫米波雷达已经具有Phased-MIMO技术特征。 大陆ARS 410属于ARS 4B系列,发布于2016年,在Conti产品系列中定位入门款(Entry),雷达小巧,结构紧凑,招人喜欢,ARS 410在有限的硬件及天线资源下,依靠算法充分释放雷达性能,也得到了诸多主机厂的青睐,VW Tiguan, Audi Q3, Nissan Rogue,Tesla Model 3等车型都有410的身影(这里实在想吐槽Tesla做FSD就别那么抠门,用这种入门MRR了,否则感知能力过于依赖视觉了)。410采用2TX/3RX,通道数目不多,但是却拥有远近扫,高分辨,俯仰检测等能力,并且也包含了Phased-MIMO技术思想。如图8, TX1/TX2一方面具有波束赋形效果,只不过不能调相而已,另一方面,TX1/TX2与RX1-RX3配合也构建了MIMO,所以说Phased-MIMO在410上也有影子。
图7 TI AWR2243 cascaded Radar(TXBeamforming) 其实在军事领域,相控阵发展要远早于MIMO雷达(20实际30年代就已经出现相控阵技术,MIMO雷达要到21世纪才正儿八经研究),而车载方面受限因素比较多,TX Beamforming技术即使理论成熟也没有发展的土壤,反倒车载雷达端MIMO技术实现所需条件没那么苛刻,包括收发多通道,远场,窄带等条件都能基本满足。 我们知道,MIMO雷达是舍弃coherent gain而只保留波形的分集增益(diversity gain),而Phased-Array 则恰恰相反只保留coherent gain而舍弃波形的分集增益。这两者在数学上是等价的,那么如果将两者融合呢,也就是即保留coherent gain又保留分集增益,这种技术就是Phased-MIMO,该技术理论部分在2010年之后快速发展,但实际上目前商用的许多毫米波雷达已经具有Phased-MIMO技术特征。 大陆ARS 410属于ARS 4B系列,发布于2016年,在Conti产品系列中定位入门款(Entry),雷达小巧,结构紧凑,招人喜欢,ARS 410在有限的硬件及天线资源下,依靠算法充分释放雷达性能,也得到了诸多主机厂的青睐,VW Tiguan, Audi Q3, Nissan Rogue,Tesla Model 3等车型都有410的身影(这里实在想吐槽Tesla做FSD就别那么抠门,用这种入门MRR了,否则感知能力过于依赖视觉了)。410采用2TX/3RX,通道数目不多,但是却拥有远近扫,高分辨,俯仰检测等能力,并且也包含了Phased-MIMO技术思想。如图8, TX1/TX2一方面具有波束赋形效果,只不过不能调相而已,另一方面,TX1/TX2与RX1-RX3配合也构建了MIMO,所以说Phased-MIMO在410上也有影子。 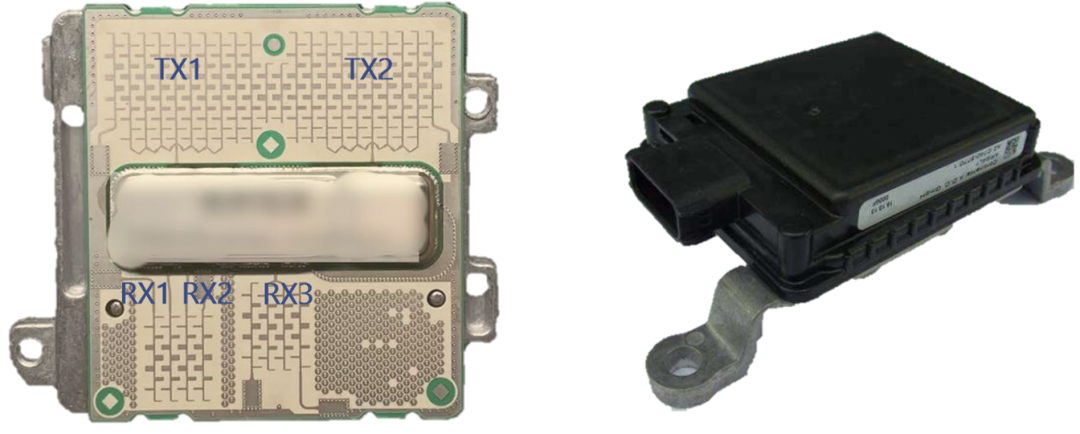 图8 ARS 410阵列布局 再看一个例子,Bosch公司于2019年量产其五代LRR,其天线布局如图8所示,可以看到TX1/TX3分别具有波束赋形效果,也就是具有相干增益(只是不能调相),同时TX1/TX3与RX1-RX3构建MIMO,相当于又获得了MIMO的分集增益。
图8 ARS 410阵列布局 再看一个例子,Bosch公司于2019年量产其五代LRR,其天线布局如图8所示,可以看到TX1/TX3分别具有波束赋形效果,也就是具有相干增益(只是不能调相),同时TX1/TX3与RX1-RX3构建MIMO,相当于又获得了MIMO的分集增益。 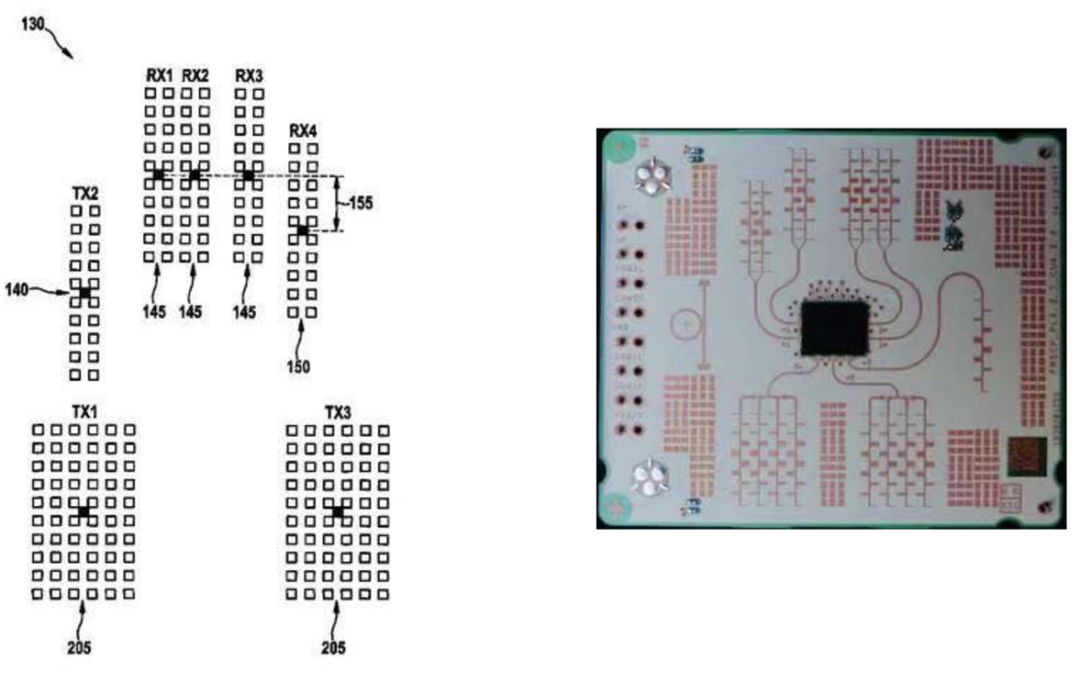 图9 Bosch 5th LRR 天线布局 Continental将于2021年量产用于L3及以上的高性能雷达传感器ARS 540,540采用4片NXP MMIC级联构建收发面阵,如图9,其MIMO等效布局之一完全构建了一个标准面阵,不仅可以方位面做DBF,俯仰面也可以做DBF,相对于目前主流的通过单脉冲求解俯仰,这种方式精度更高,同时具备了俯仰分辨能力。是今后车载雷达重要的发展方向。
图9 Bosch 5th LRR 天线布局 Continental将于2021年量产用于L3及以上的高性能雷达传感器ARS 540,540采用4片NXP MMIC级联构建收发面阵,如图9,其MIMO等效布局之一完全构建了一个标准面阵,不仅可以方位面做DBF,俯仰面也可以做DBF,相对于目前主流的通过单脉冲求解俯仰,这种方式精度更高,同时具备了俯仰分辨能力。是今后车载雷达重要的发展方向。 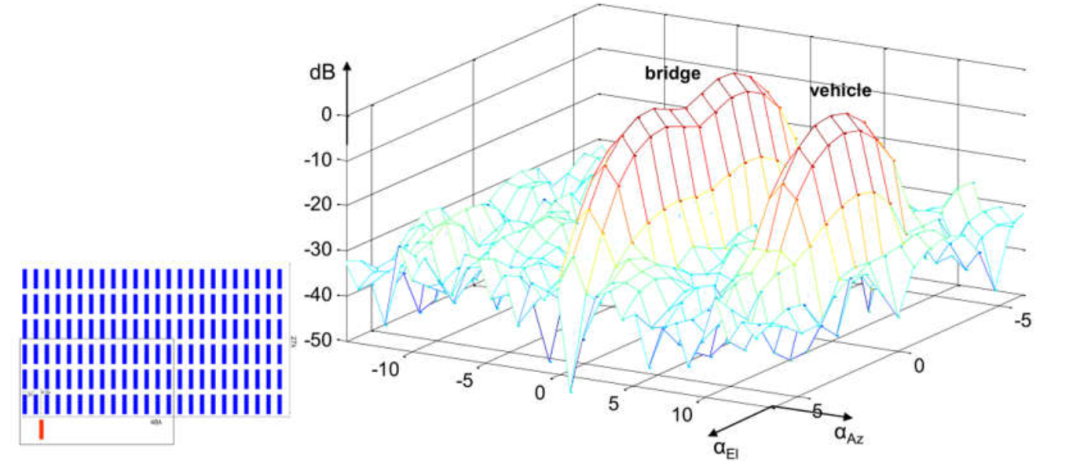 图10 ARS 540等效阵列布局(之一) 需要说明的是,早期的雷达求解角度许多也基于单脉冲技术(Mono pulse)(比幅,比相,早期博世LRR基本也是单脉冲为主),其实,现阶段该技术也在广泛使用,但不在我们这期主题范围内,故不作讨论。 其实抛开机械扫描以及Monopulse等角度求解方式,文章论述重点都是围绕MIMO,Phased-MIMO,以及Phased-array等技术逐一展开,并简单介绍这些技术目前在车载雷达的运用,并且由于MMIC以及处理器芯片技术的迭代发展,俯仰角维度的DBF,也就是3D Beamforming 也可以做了,但本质还都是围绕上述三个技术,所以下期将进一步在理论层面讨论MIMO,Phased-MIMO以及Phased-array,并在数学上统一三者,以求对其更深层次的理解,并且在车载上更加灵活的运用,下期见。
图10 ARS 540等效阵列布局(之一) 需要说明的是,早期的雷达求解角度许多也基于单脉冲技术(Mono pulse)(比幅,比相,早期博世LRR基本也是单脉冲为主),其实,现阶段该技术也在广泛使用,但不在我们这期主题范围内,故不作讨论。 其实抛开机械扫描以及Monopulse等角度求解方式,文章论述重点都是围绕MIMO,Phased-MIMO,以及Phased-array等技术逐一展开,并简单介绍这些技术目前在车载雷达的运用,并且由于MMIC以及处理器芯片技术的迭代发展,俯仰角维度的DBF,也就是3D Beamforming 也可以做了,但本质还都是围绕上述三个技术,所以下期将进一步在理论层面讨论MIMO,Phased-MIMO以及Phased-array,并在数学上统一三者,以求对其更深层次的理解,并且在车载上更加灵活的运用,下期见。
【参考文献】
[1] Menzel W , Moebius A . Antenna Conceptsfor Millimeter-Wave Automotive Radar Sensors[J]. Proceedings of the IEEE, 2012,100(7):2372-2379.
[2] Rohling H . Milestones in radar and thesuccess story of automotive radar systems[C]// Radar Symposium (IRS), 2010 11thInternational. IEEE, 2010.
[3] Meinel H H . Evolving automotive radar — From the very beginnings into thefuture[C]// 2014 8th European Conference on Antennas and Propagation (EuCAP).IEEE, 2014. 【本文图片来自公开技术资料】
 最前沿的电子设计资讯
最前沿的电子设计资讯
