
 。
。继续聊聊4D雷达,我们天天挂嘴上的4D雷达,其实不过是她的昵称,她的全名可能比较长:4D FMCW MIMO High Resolution Radar, 或者4D FMCW MIMO Imaging Radar, 简称4D雷达,为什么要特意提名字呢,因为名字中的“MIMO”是我们今天的主角,来,有请MIMO。
MIMO(多输入多输出)技术最早在通信领域大放异彩,比如我们很多手机,路由器用的很多2x2 MIMO技术,目的呢当然是提高通信容量。21世纪初,MIMO 技术才被MIT 林肯实验室(MIT Lincoln Lab,牛逼坏了的实验室)的几位大牛引入到雷达领域,当然,这里的雷达是用于军事国防领域的。事实上,绝大多数技术走的都是这么一条路线,先军后民。MIMO雷达其实分类比较多,我们主要还是聚焦于车载或民用领域的单基地MIMO雷达(co-located MIMO),并且今天主要聊聊这类MIMO雷达的通道分离技术。
我在(4D 雷达天线布局思考-俯仰角篇)中聊过,提高天线孔径与雷达尺寸是矛盾的,那么MIMO技术就是救星之一,它可以提高天线孔径的同时保障雷达尺寸限定在一定范围内。同时,MIMO技术又可以平滑目标RCS,降低RCS闪烁效应,并且还可以获得非相参积累增益,可谓好处多多。获得收益是要付出一定代价的,那引入MIMO的核心问题就是实现接收端通道分离,也就是接收端的每个接收天线(通道)需要分离若干发射天线的混合信号,从而实现虚拟孔径合成。
探讨关于MIMO radar接收端通道分离问题(仅仅以FMCW雷达为例)主要集中在两方面:
1 通道分离目的
关于通道分离目的上面也提过,就是构建虚拟阵列作DoA,这也是民用及车载雷达引入MIMO概念的重要原因之一。
2 通道分离层级及手段
关于分离层级
可以分为发射端及接收端,接收端又可以分为距离域,多普勒域以及角度域
关于分离手段
1 在发射端层面,最常见的也是目前用的最多的就是时分(TDM)如图1所示,这种方式通过各通道交替发射波形实现各通道在时间上的分离。该技术简单粗暴,最大的优势在于通道之间是没有干扰的,而且部署简单。但是,问题也很多,比如,没有了MIMO发射增益;接收端需要的存储资源与发射天线成正比(这点很要命);需要补偿chirp之间运动目标位置变化引起的相位变化;不模糊速度范围降低等。
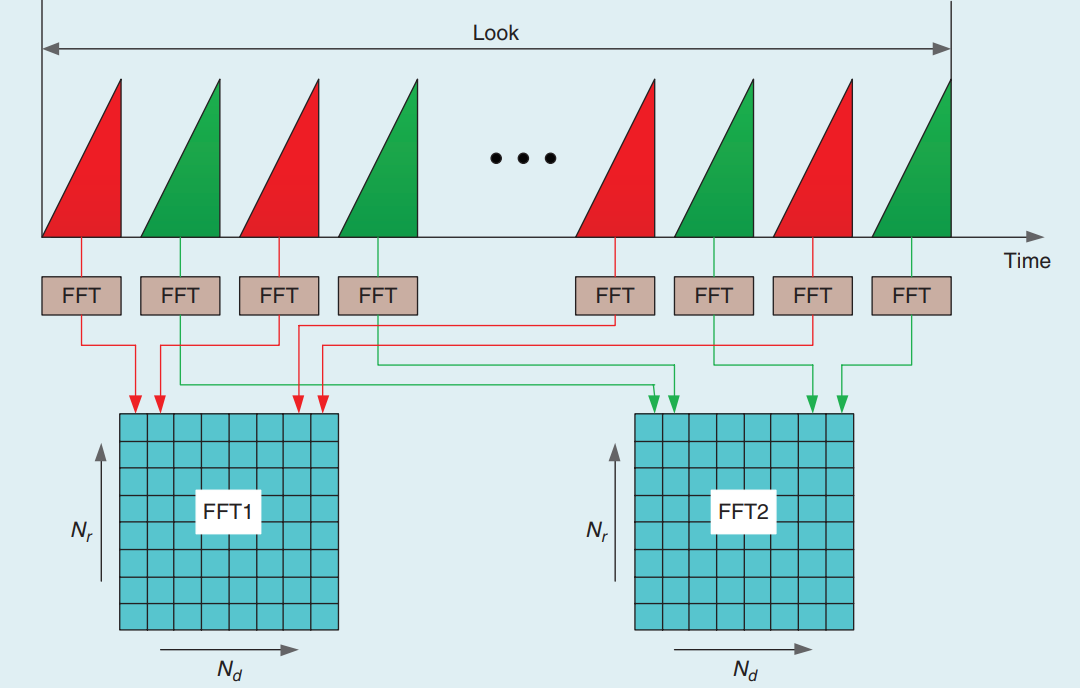
图1 TDM示意图
2 在接收端层面,接收端这边可以玩的花样比较多,不过都需要发射端打配合(包括发射信号合适的频偏与编码)。主要注意的是,这一层面都是同发的(Transmit simultaneously)。
1) 距离域,在距离域玩的花样基本有两种,编码或者频偏,先说编码,该编码也可称之为快时间编码(FT-CDM),也就是在chirp内编入具有高度自相关性和低互相关性编码,在接收端通过匹配滤波器做滤波处理分离通道,不过目前的嵌入式平台(比如TI,NXP的常见平台)不支持这样的编码操作,所以实际中基本不用;而对于频偏,这里的频偏就是也分为两种,一种是称之为多带(也就是FDM),也就是每个通道的数据寄载于某个频点,频点之间的间隔就是信号带宽,接收端通过相应的匹配滤波器分离,这种方式不适合dechirp机制;而另一种就是dechirp后的拍频域(beat-frequency)构建频偏,如图2所示,这种方式完美对接dechirp机制,唯一的缺点就是探测距离与发射天线呈反比,并且需要发射端不同通道构建不同频偏。
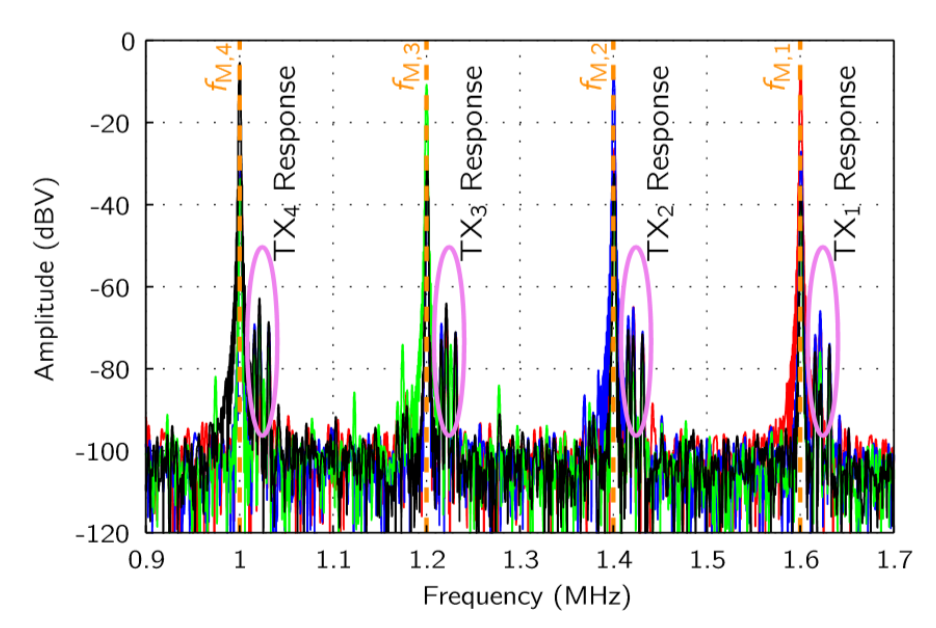
图2 距离域通道分离(BFD)
2) 多普勒域花样也多,多普勒域也成为慢时间域(slow-time),首先是慢时间维相位编码,这种相位编码有两种,ST-CDM和ST-DDM,ST-CDM也是通过在chirp间编入具有高度自相关性和低互相关性编码,实现通道分离,缺点是降低了目标检测的动态范围,因为这种方式Doppler维度的旁瓣比较高;ST-DDM是在Doppler维引入频偏,使得通道分离,这种方式也会降低不模糊多普勒速度,并且还会引入通道模糊概念,需要引入新的处理逻辑与高级算法,CDM与DDM效果如图3所示,其中可以看到CDM所在Doppler维度的干扰比较大。TDM,CDM,FDM的示意图如图4所示。
3) 而角度域做通道分离主要对潜在目标点(cluster)做Alamouti解码,这种方式不需要复杂编码,phase shifter只需要0,pi即可,不会引入通道间干扰,并且不需要占用过多内存,问题是不模糊速度通道会降低并且需要速度相位补偿,这一点与TDM是类似的。
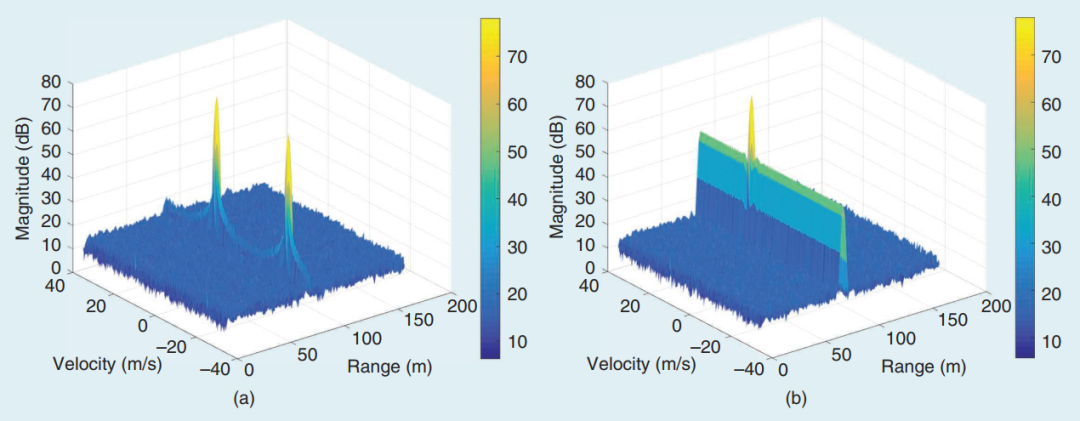
图3 DDM(左),ST-CDM(右)仿真结果
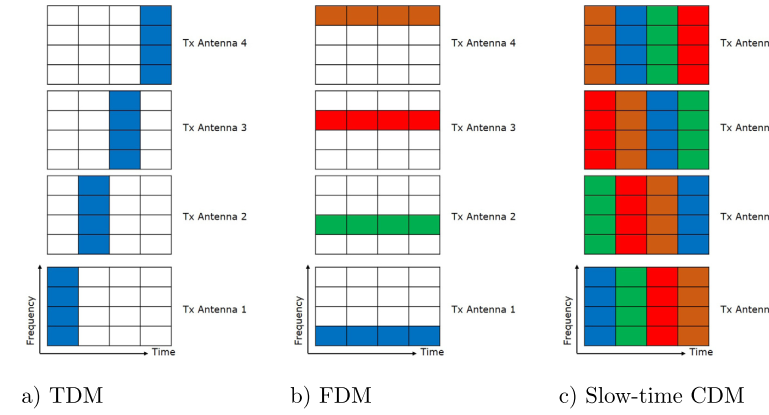
图4 TDM,FDM,CDM示意
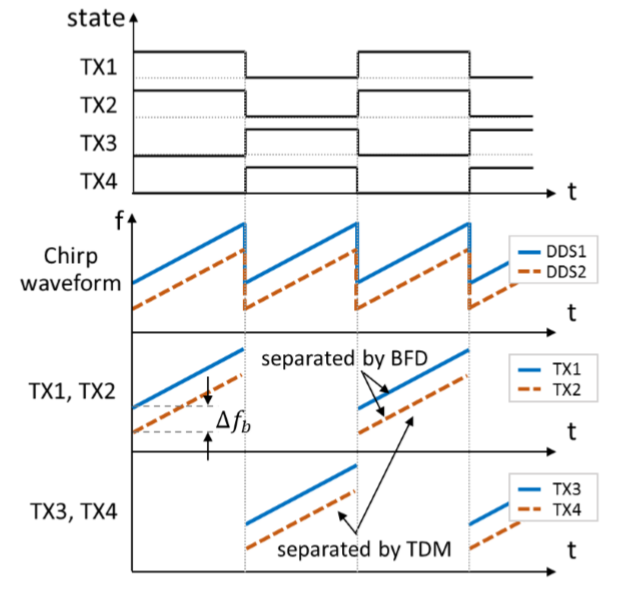
图5 TDM+BFD
最后推荐大家精读下参考文献[1],可能大家读过,那不妨再多读几遍,相信会有更多思考和感悟。
如何做好一款4D 高分辨毫米波雷达
4D 雷达天线布局思考-俯仰角篇
(加餐)从车载雷达认识傅里叶变换
(加餐)克拉美劳下界与分辨率
(INSIGHTS TALK) 聊聊 Cognitive Radar
加餐)欧拉角及矩阵旋转
4D雷达天线布局思考-方位角篇

 最前沿的电子设计资讯
最前沿的电子设计资讯
