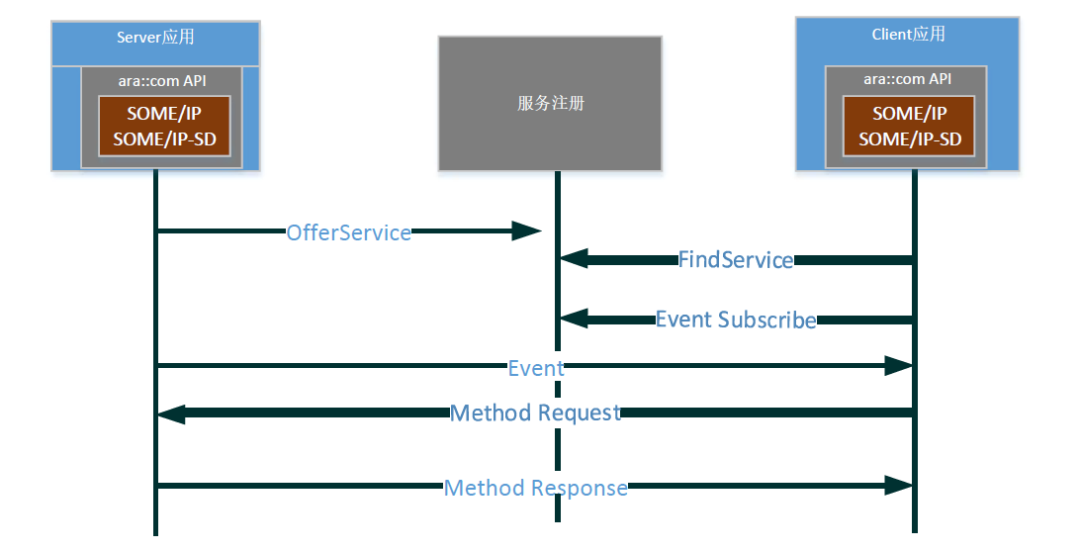
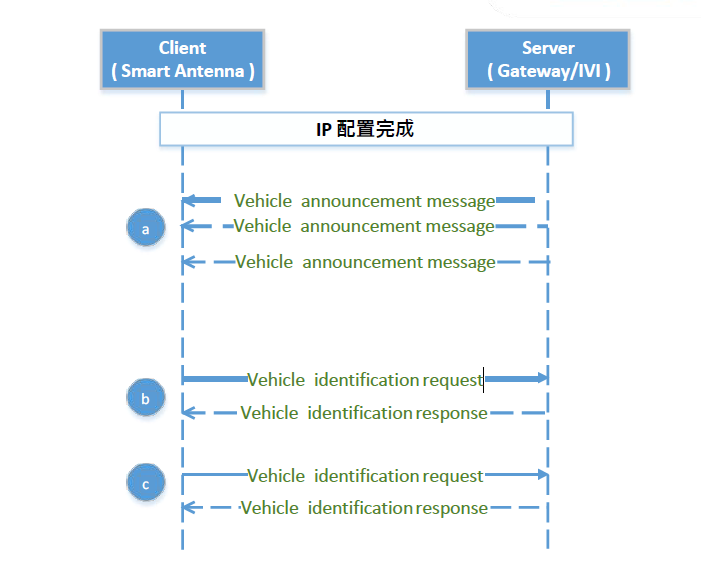
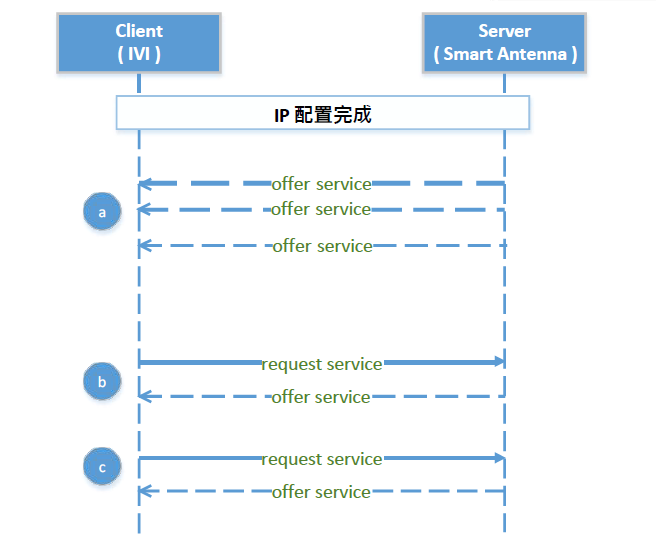
Server 以固定间隔时间,周期性的发送offer service 消息,该消息中携带服务ID、实例ID、端口号、IP 地址等信息,如图2-17 中a 处所示。y9gednc
由Client 在适当时机以组播方式发送request server 消息,收到该消息的Server 以单播的形式回复offer service 消息,其中携带逻辑地址、VIN、EID 等信息。如图2-17 中b、c 处所示。y9gednc


 最前沿的电子设计资讯
最前沿的电子设计资讯

