
二、FSD 老司机成长记
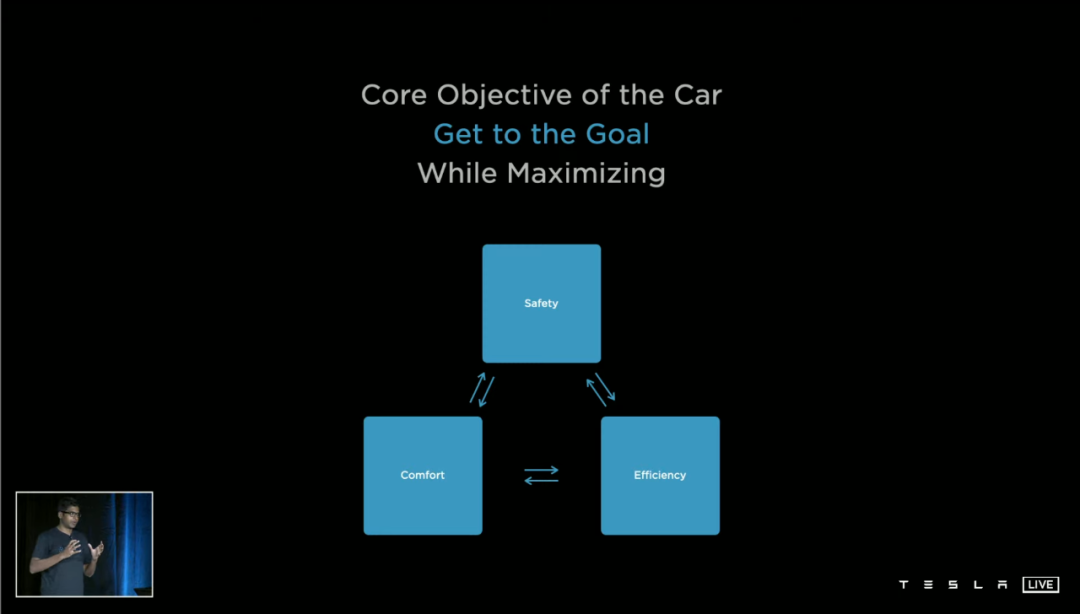
在特斯拉的理解里,自动驾驶的目标,就是同时最大化安全 safety、舒适 comfort,以及效率 efficiency。是的,同时,缺一不可。
第一段说「看路」,本质上是自动驾驶的感知。而本段讨论的则是规划,以及控制。事实上特斯拉用了海量篇幅讨论「规划」,控制相对少很多。

我们直接看疗效:
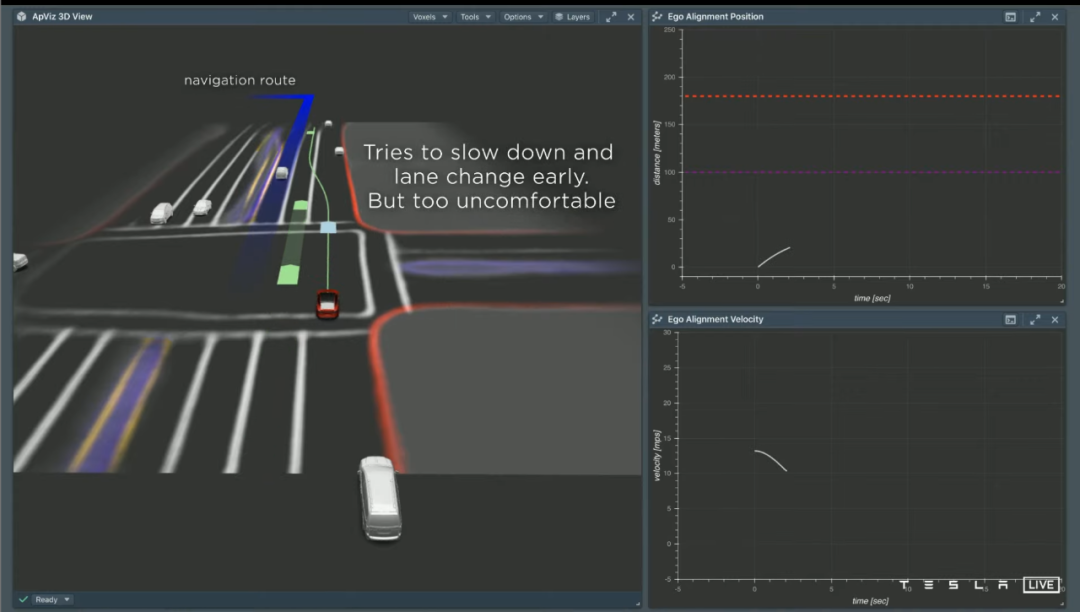
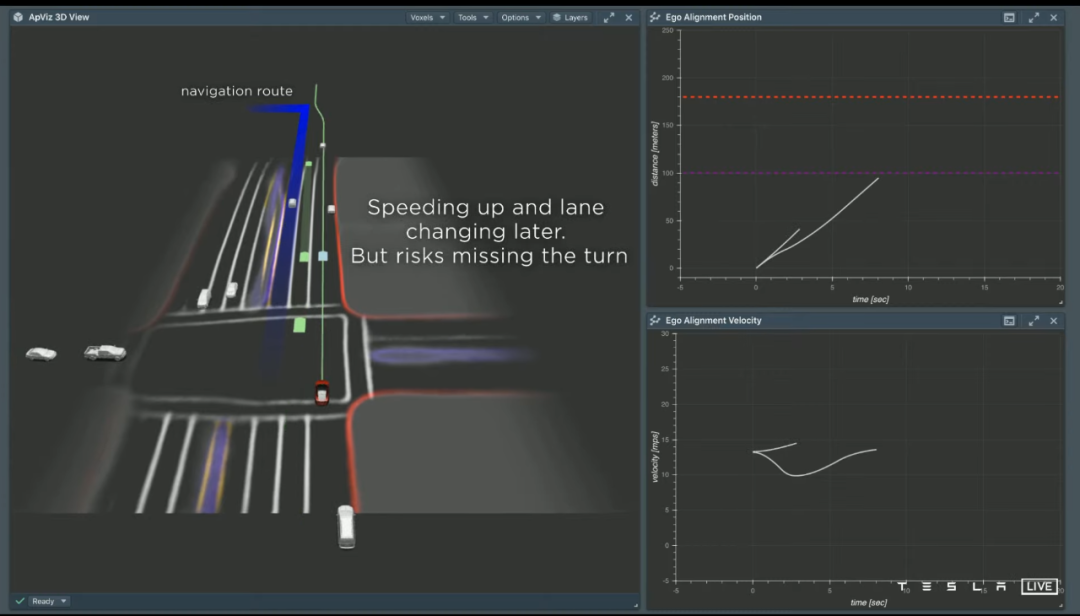
比如上图,我们经过一个十字路口之后,前方还要左转。这时候有多种操作方式:减速提早变线、加速推迟变线,等等。但每个选择都可能有缺点,依据的路况也不一样,这就是 coarse search 粗搜索。
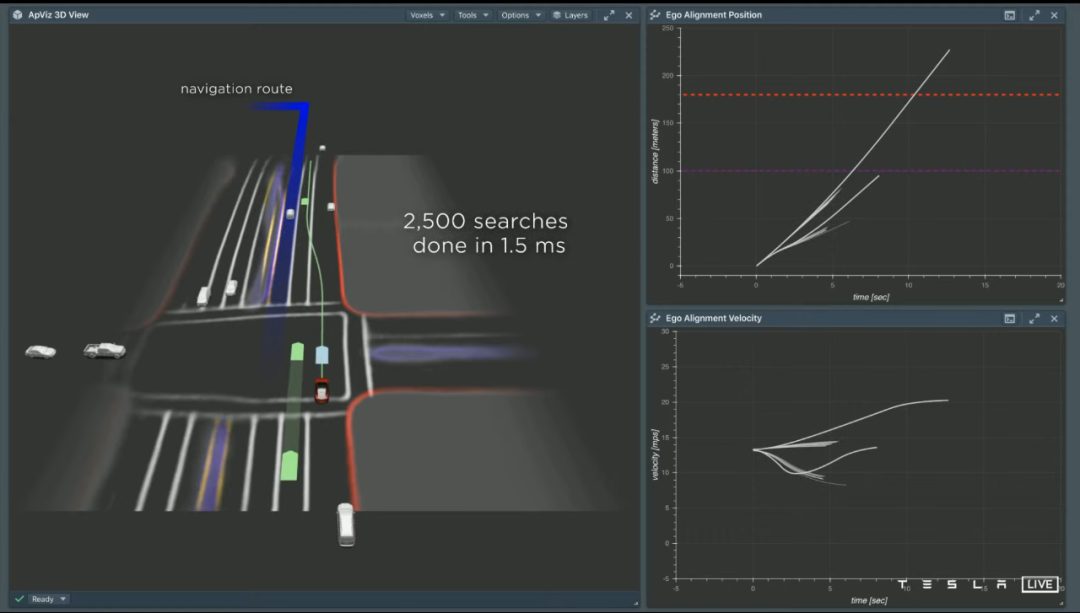
特斯拉表示仅仅 1.5 毫秒内,系统就可以做出 2500 个粗搜索。灵光一现也许都不太够用,这得灵光 2500 现。
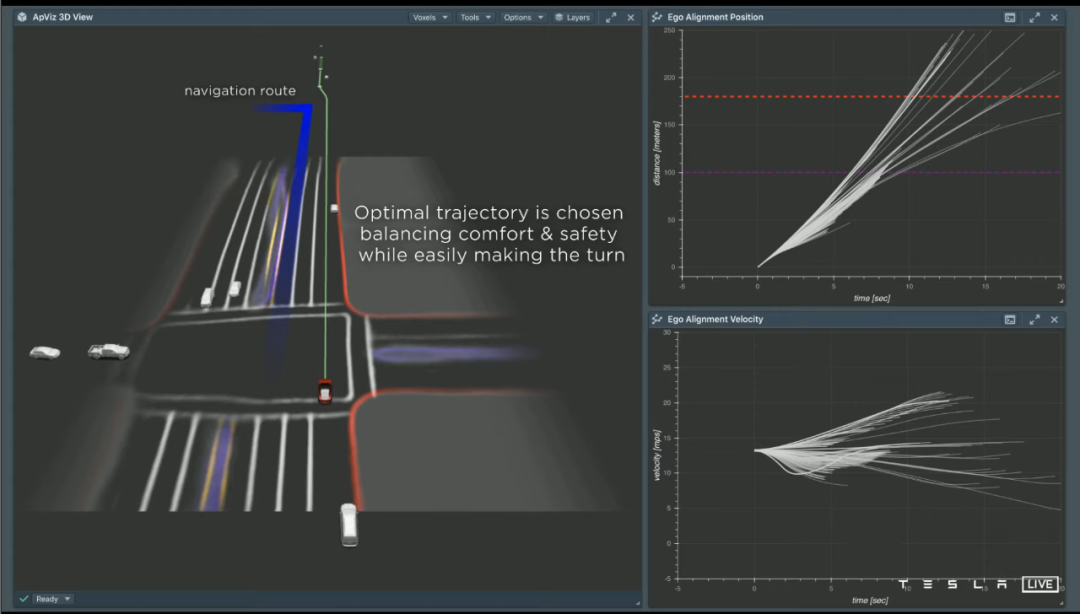
即使是灵光 2500 万现,最终也得往前开。经历众多备选项之后,系统就可以做出相对合理的抉择,在兼顾舒适与安全的基础上,尽量简单地把弯给转了,这就是 smooth trajectory 平滑轨迹。
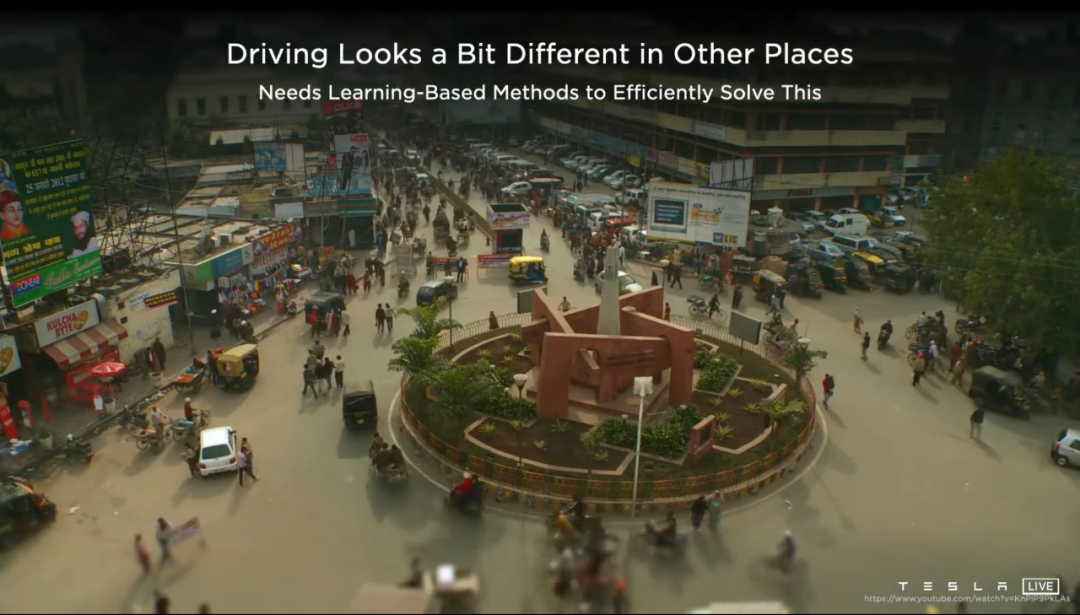
自动驾驶的科目二和科目三几乎是一起上的,而且课程极其繁重——因为路况瞬息万变。
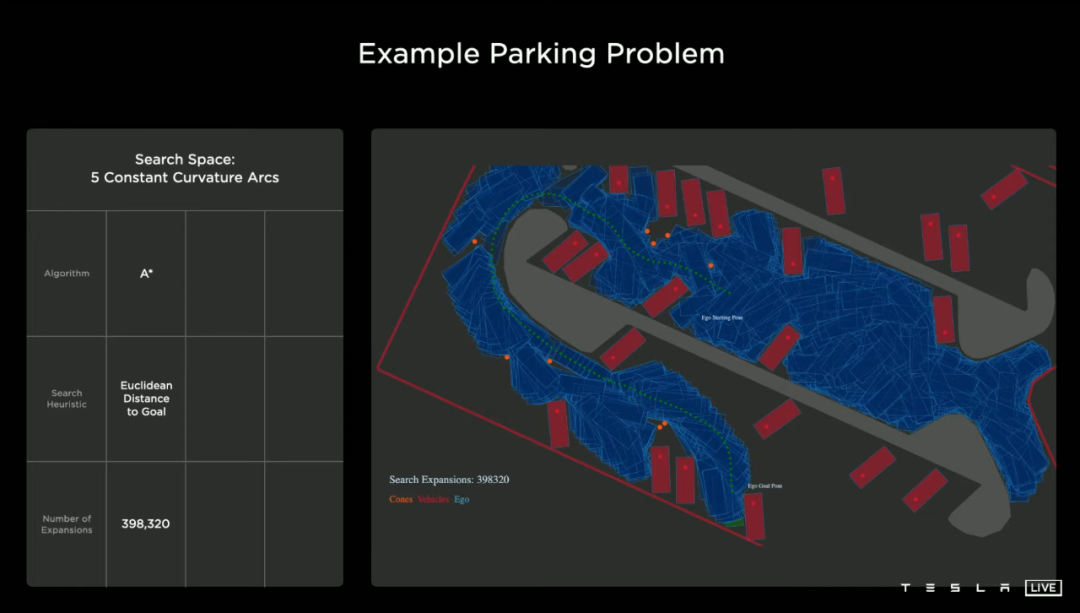
这时候依然需要粗搜索大法,以停车场为例,在走过一个弯的路程内,Autopilot 已经进行了接近 40 万次的粗搜索:
对于特斯拉来说,规划的最终目的,就是为了 Corridor 行驶通道内的安全、顺滑和速度不断优化。
 最前沿的电子设计资讯
最前沿的电子设计资讯

