首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
图集
全部标签
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
视频工作室
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
NEW
IIC Shanghai 2025
IC设计成就奖投票
标题
简介
内容
作者
全部
标题
简介
内容
作者
全部
首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
×
杂志声明
我司杂志提供免费订阅,任何第三方平台的赠送或售卖行为均未获得我司授权,我司保留追究其法律责任的权利!
广告
CAN是什么?有哪些特点?
时间:
2021-08-24
作者:
汽车电子与软件
阅读:
分享
扫码分享到好友
海报分享
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。
CAN
是什么?
CAN
是
Controller Area Network
的缩写(以下称为
CAN
),是
ISO
国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应
“
减少线束的数量
”
、
“
通过多个
LAN
,进行大量数据的高速通信
”
的需要,
1986
年德国电气商博世公司开发出面向汽车的
CAN
通信协议。此后,
CAN
通过
ISO11898
及
ISO11519
进行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,
CAN
的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
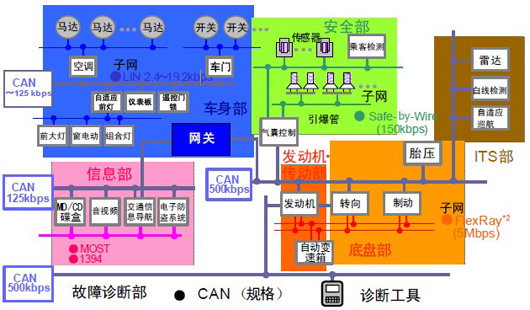
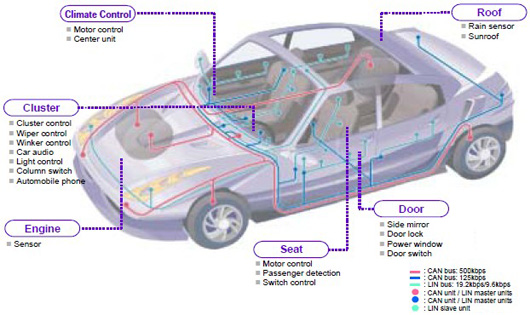
下图是车载网络的构想示意图。
CAN
等通信协议的开发,使多种
LAN
通过网关进行数据交换得以实现。
CAN的应用实例
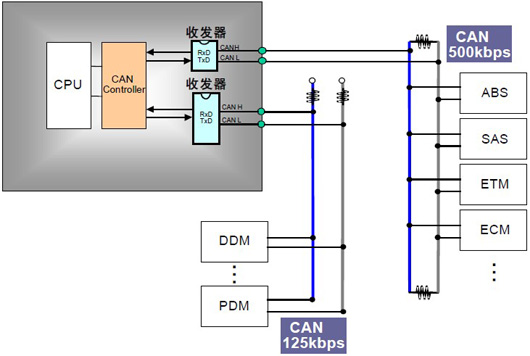
总线拓扑图
CAN
控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
CAN
的连接示意图
CAN的特点
CAN
协议具有以下特点:
(1)
多主控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权(
CSMA/CA
方式)。
多个单元同时开始发送时,发送高优先级
ID
消息的单元可获得发送权。
(2)
消息的发送
在
CAN
协议中,所有的消息都以固定的格式发送。
总线空闲时,所有与总线相连的单元都可以开始发送新消
息。两个以上的单元同时开始发送消息时,根据标识符(
Identifier
以下称为
ID
)决定优先级。
ID
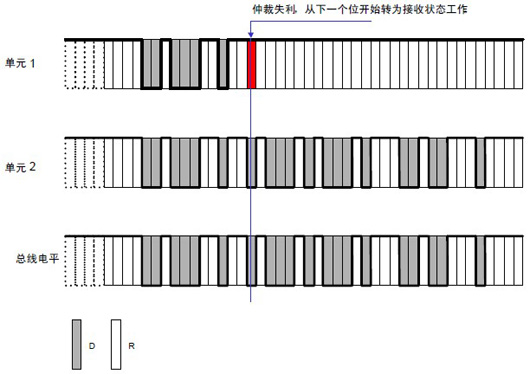
并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息
ID
的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3)
系统的柔软性
与总线相连的单元没有类似于
“
地址
”
的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4)
通信速度
根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
(5)
远程数据请求
可通过发送
“
遥控帧
”
请求其他单元发送数据。
(6)
错误检测功能
·
错误通知功能
·
错误恢复功能
所有的单元都可以检测错误(错误检测功能)。
检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。
正在发送消息的单元一旦检测出错误,会强制结束当前的发送。
强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)。
(7)
故障封闭
CAN
可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
(8)
连接
CAN
总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
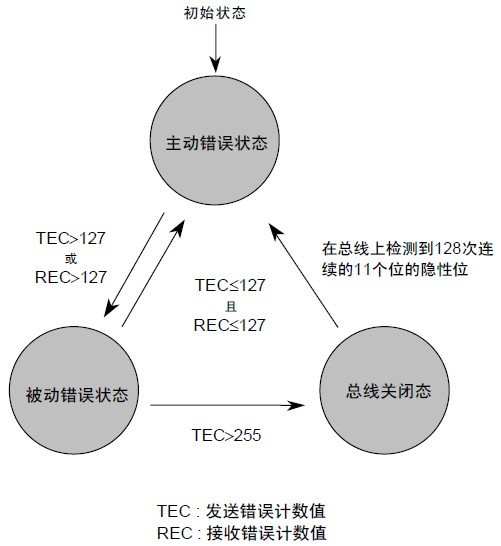
CAN的错误状态类型
单元始终处于
3
种状态之一。
(1)
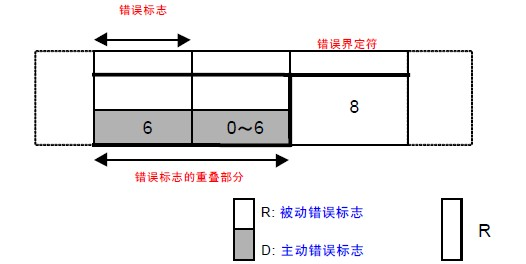
主动错误状态
主动错误状态是可以正常参加总线通信的状态。
处于主动错误状态的单元检测出错误时,输出主动错误标志。
(2)
被动错误状态
被动错误状态是易引起错误的状态。
处于被动错误状态的单元虽能参加总线通信,但为不妨碍其它单元通信,接收时不能积极地发送错误通知。
处于被动错误状态的单元即使检测出错误,而其它处于主动错误状态的单元如果没发现错误,整个总线也被认为是没有错误的。
处于被动错误状态的单元检测出错误时,输出被动错误标志。
另外,处于被动错误状态的单元在发送结束后不能马上再次开始发送。在开始下次发送前,在间隔帧期间内必须插入
“
延迟传送
”(8
个位的隐性位
)
。
(3)
总线关闭态
总线关闭态是不能参加总线上通信的状态。
信息的接收和发送均被禁止。
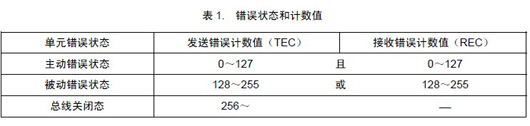
这些状态依靠发送错误计数和接收错误计数来管理,根据计数值决定进入何种状态。错误状态和计数值的关系如表
1
及图所示。
图:单元的错误状态
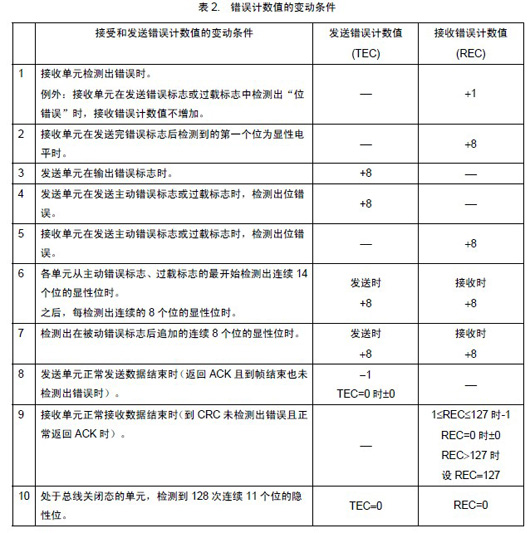
错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表
2
所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
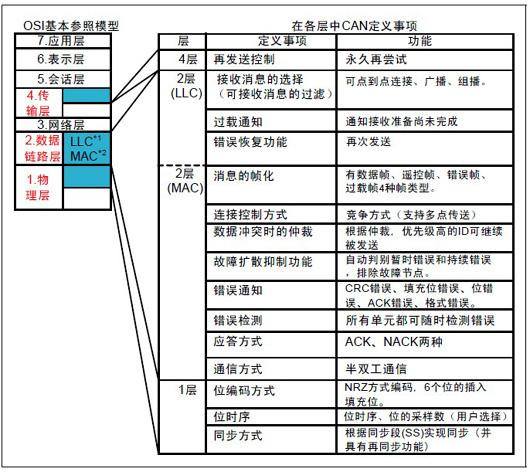
CAN协议的基本参照模型
CAN
协议如表
3
所示涵盖了
ISO
规定的
OSI
基本参照模型中的传输层、数据链路层及物理层。
CAN
协议中关于
ISO/OSI
基本参照模型中的传输层、数据链路层及物理层,具体有哪些
定义如图所示。
图:
ISO/OSI
基本参照模型和
CAN
协议
数据链路层分为
MAC
子层和
LLC
子层,
MAC
子层是
CAN
协议的核心部分。数据链路层的功能是将物理层收到的信号组织成有意义的消息,并提供传送错误控制等传输控制的流程。具体地说,就是消息的帧化、仲裁、应答、错误的检测或报告。数据链路层的功能通常在
CAN
控制器的硬件中执行。
在物理层定义了信号实际的发送方式、位时序、位的编码方式及同步的步骤。但具体地说,信号电平、通信速度、采样点、驱动器和总线的电气特性、连接器的形态等均未定义。这些必须由用户根据系统需求自行确定。
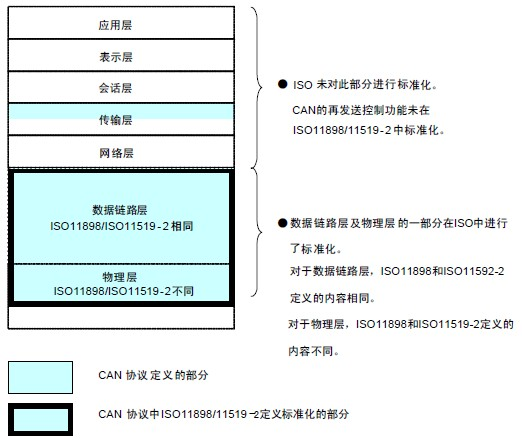
ISO 标准化的CAN 协议
CAN
协议经
ISO
标准化后有
ISO11898
标准和
ISO11519-2
标准两种。
ISO11898
和
ISO11519-2
标准对于数据
链路层的定义相同,但物理层不同。
(1)
关于
ISO11898
ISO11898
是通信速度为
125kbps-1Mbps
的
CAN
高速通信标准。
目前,
ISO11898
追加新规约后,成为
ISO11898-1
新标准。
(2)
关于
ISO11519
ISO11519
是通信速度为
125kbps
以下的
CAN
低速通信标准。
ISO11519-2
是
ISO11519-1
追加新规约后的版本。
下图
表示
CAN
协议和
ISO11898
及
ISO11519-2
标准的范围。
图:
ISO
标准化的
CAN
协议
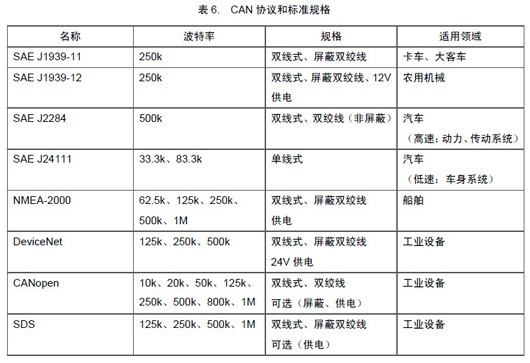
CAN 和标准规格
不仅是
ISO
,
SAE
等其它的组织、团体、企业也对
CAN
协议进行了标准化。
基于
CAN
的各种标准规格如表
6
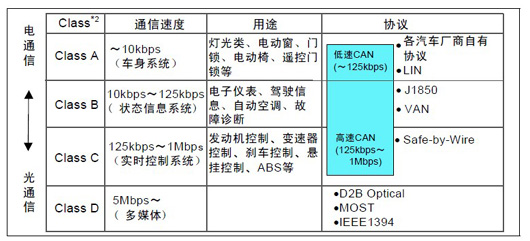
所示,如图所示,面向汽车的通信协议以通信速度为准进行了分类。
图:通信协议分类
CAN协议报文
1. 帧的总类
通信是通过以下
5
种类型的帧进行的。
●
数据帧
●
遥控帧
●
错误帧
●
过载帧
●
帧间隔
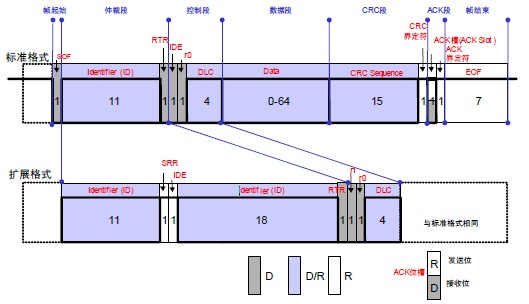
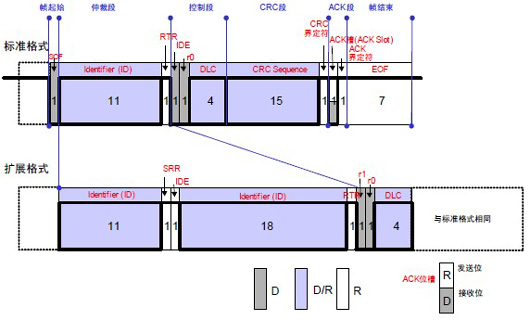
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有
11
个位的标识符(
Identifier:
以下称
ID
),扩展格式有
29
个位的
ID
。
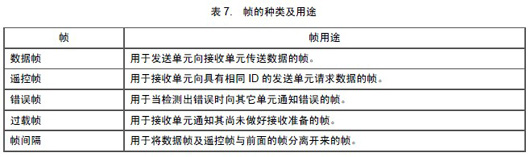
各种帧的用途如表
7
所示,各种帧的构成如图
1
~图
5
所示。
图
1.
数据帧的构成
图2.遥控帧的构成
图3.错误帧
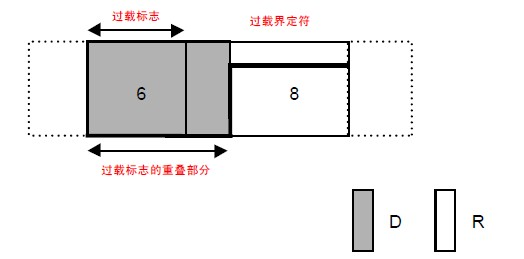
图4.过载帧
图5.帧间隔
2.优先级的决定
在总线空闲态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送。
仲裁的过程如图所示。
图
.
仲裁过程
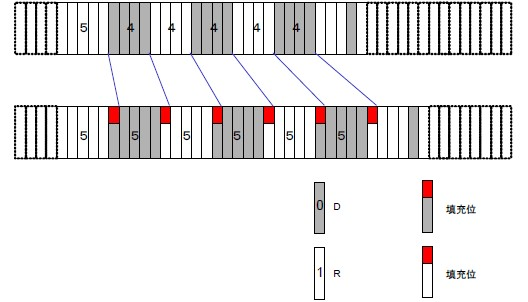
3.
位填充
位填充是为防止突发错误而设定的功能。当同样的电平持续
5
位时则添加一个位的反型数据。
位填充的构成如图 所示。
(1)
发送单元的工作
在发送数据帧和遥控帧时,
SOF
~
CRC
段间的数据,相同电平如果持续
5
位,在下一个位(第
6
个位)则要插入
1
位与前
5
位反型的电平。
(2)
接收单元的工作
在接收数据帧和遥控帧时,
SOF
~
CRC
段间的数据,相同电平如果持续
5
位,需要删除下一个位(第
6
个位)再接收。如果这个第
6
个位的电平与前
5
位相同,将被视为错误并发送错误帧。
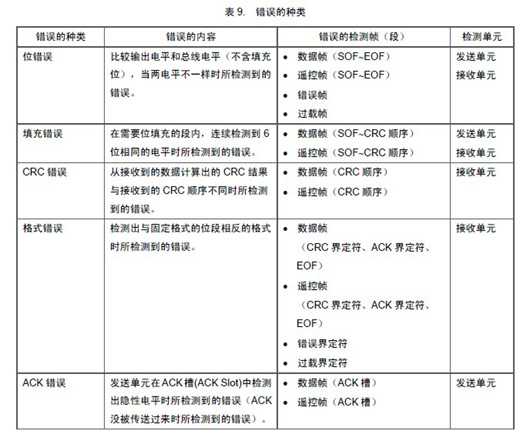
4. 错误的种类
错误共有
5
种。多种错误可能同时发生。
●
位错误
●
填充错误
● CRC
错误
●
格式错误
● ACK
错误
错误的种类、错误的内容、错误检测帧和检测单元如表
9
所示。
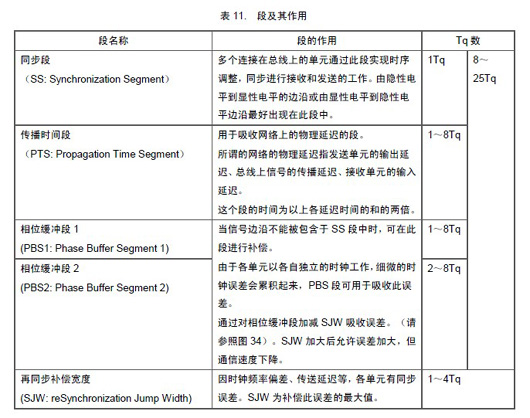
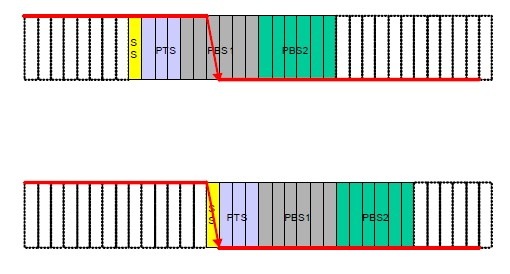
5.位时序
由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为
4
段。
●
同步段(
SS
)
●
传播时间段(
PTS
)
●
相位缓冲段
1
(
PBS1
)
●
相位缓冲段
2
(
PBS2
)
这些段又由可称为
Time Quantum
(以下称为
Tq
)的最小时间单位构成。
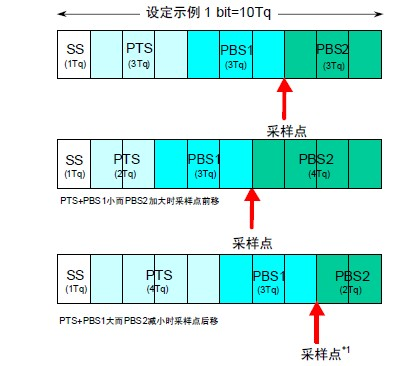
1
位分为
4
个段,每个段又由若干个
Tq
构成,这称为位时序。
1
位由多少个
Tq
构成、每个段又由多少个
Tq
构成等,可以任意设定位时序。通过设定位时序,多 个单元可同时采样,也可任意设定采样点。
各段的作用和
Tq
数如表
11
所示。
1
个位的构成如图所示。
6. 取得同步的方法
CAN
协议的通信方法为
NRZ
(
Non-Return to Zero
)方式。各个位的开头或者结尾都没有附加同步信号。发送单元以与位时序同步的方式开始发送数据。另外,接收单元根据总线上电平的变化进行同步并进行接收工作。但是,发送单元和接收单元存在的时钟频率误差及传输路径上的(电缆、驱动器等)相位延迟会引起同步偏差。因此接收单元通过硬件同步或者再同步的方法调整时序进行接收。
6.1
硬件同步
接收单元在总线空闲状态检测出帧起始时进行的同步调整。
在检测出边沿的地方不考虑
SJW
的值而认为是
SS
段。
硬件同步的过程如图所示。
硬件同步的过程如图所示。
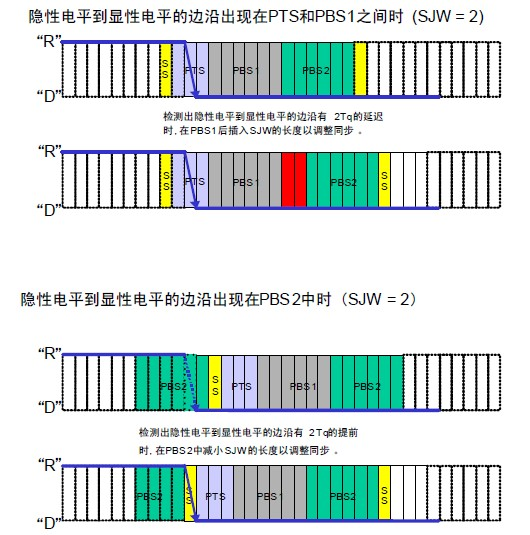
6.2
再同步
在接收过程中检测出总线上的电平变化时进行的同步调整。
每当检测出边沿时,根据
SJW
值通过加长
PBS1
段,或缩短
PBS2
段,以调整同步。但如果发生了超出
SJW
值的误差时,最大调整量不能超过
SJW
值。
再同步如图所示。
6.3
调整同步的规则
硬件同步和再同步遵从如下规则:
(1) 1
个位中只进行一次同步调整。
(2)
只有当上次采样点的总线值和边沿后的总线值不同时,该边沿才能用于调整同步。
(3)
在总线空闲且存在隐性电平到显性电平的边沿时,则一定要进行硬件同步。
(4)
在总线非空闲时检测到的隐性电平到显性电平的边沿如果满足条件(
1
)和(
2
),将进行再同步。但还要满足下面条件。
(5)
发送单元观测到自身输出的显性电平有延迟时不进行再同步。
(6)
发送单元在帧起始到仲裁段有多个单元同时发送的情况下,对延迟边沿不进行再同步。
文章来源
:
润芯微科技公众号
—
END
—
投稿合作:18918250345(微信)
文章来源及版权属于汽车电子与软件,EDN电子技术设计仅作转载分享,对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如有疑问,请联系
Demi.xia@aspencore.com
阅读全文,请先
汽车电子与软件
汽车电子与软件
进入专栏
汽车电子
网络/协议
分享到:
返回列表
上一篇:
带均衡的data信号!DDR5仿真技术详解(下)
下一篇:
与苹果音频系统相比,高通骁龙畅听在安卓生态下有哪些优势?
微信扫一扫
一键转发
最前沿的电子设计资讯
请关注
“电子技术设计微信公众号”
推荐内容
兴趣推荐
丰田要在中国市场加码!信心从何而来?
丰田计划到 2030 年,在中国实现年产至少 250 万辆汽车,更有消息称目标为 300 万辆,相较于 2022 年 184 万辆、2
AI如何提供情绪价值?表情陪伴人形机器人
表情陪伴机器人通过情感交互技术与仿真设计,可以填补了AI虚拟陪伴的短板,更推动了人机关系从工具化向情感化发
拆解报告:松下电器1200W电吹风
松下EH-NW90电吹风内置10万转高速无刷电机,并具备三档风速和四档风温可选。电吹风内置纳诺怡技术,为秀发提供
Nvidia Omniverse:物理人工智能后面的“软核心”
GPU的进步正深刻重塑着众多行业,英伟达凭借其技术创新不断拓展产业边界。继 CUDA 之后,Omniverse 极有可能成
CES|禾赛科技发布激光雷达新品,从智能驾驶拓展到机器人
在 CES 2025 上,禾赛科技推出了一系列新的激光雷达产品,包括1440线的AT1440、超广角固态雷达FTX以及面向机器
2025,大众汽车集团在中国如何转型?
2024 年,大众汽车集团(中国)在复杂多变的市场环境中成功达成销量目标,向客户交付超过 290 万辆汽车,新能源汽车领
拆解报告:联想thinkplus 30W迷你氮化镓充电器
联想thinkplus 30W迷你氮化镓充电器延续口红系列风格设计,整体小巧美观,充电器支持QC3.0/4+、FCP、SCP、AFC、
中国品牌崛起!2024年以色列汽车市场解析
2024年的以色列汽车市场中国品牌的迅速崛起和本土消费者对电动车的强烈需求,真是好事···
机器狗有什么用?技术和市场发展趋势
机器狗作为机器人领域的重要分支,正逐渐渗透至众多行业,引发广泛关注与变革。其融合机械、电子、控制、人工智
拆解报告:希辉达35W带伸缩线氮化镓充电器
希辉达35W带伸缩线氮化镓充电器本质是配备双USB-C接口,但将其中一个设计成时下受欢迎的伸缩线,免去了用户日常
拆解报告:酷态科磁吸电能块CP132ML
酷态科磁吸电能块采用白色块式设计,标称容量10000mAh。搭载一个USB-C接口和一根USB-C自带线,均支持PD 20W双向
德国大众裁员降薪!AI时代的行业现状
大众汽车的紧缩计划和薪酬调整折射出整个汽车行业在转型期的困境。从短期看,裁员和削减薪酬是应对利润压力的
雷军的汽车梦:小米2024的成功密码与2025新目标
2024年,小米汽车通过技术积累、清晰战略和精准产品定位,在智能电动车市场取得了阶段性胜利。展望2025年,小米将
特斯拉销量十年来首次下滑,跌在哪里了?
2024年,特斯拉全球交付量为178.92万辆,同比下降1.1%,这是公司十年来首次年度销量下滑。尽管全年产量和交付量接
拆解报告:Verizon 45W USB-C快充充电器
Verizon 45W快充充电器为方块设计,配有折叠插脚,携带方便。产品配有指示灯,能够指示充电状态,同时支持45W输出功
拆解报告:Baseus倍思MC1开放式耳机
Baseus倍思MC1开放式耳机在外观设计方面,充电设计圆润,体积轻巧,便于携带。耳机采用了耳夹式设计,耳夹内嵌柔软
拆解报告:SONY索尼WH-CH520头戴式耳机
SONY索尼WH-CH520头戴式耳机在外观方面,设计的非常小巧轻盈,同时头梁支持长度调节,耳壳支持四向旋转,搭配柔软的
为什么负我不负她,PCB上的光学点是如何出轨的
板子上的光标点有异常,贴片时无法精准对位,可能要开治具焊接···
拆解报告:联想thinkplus 100W USB-C快充数据线
联想这款USB-C数据线长度为1米,线缆两头为双层塑料壳设计,并印有thinkplus字样。实测线缆支持100W功率传输,适
日本汽车2024年销量同比下滑严重,为什么?
2024年,日本汽车市场遭遇了7.5%的销量同比下滑,全年新车销量定格在442万辆,低于去年的478万辆,萎缩不仅源于整体
使用MSO 5/6内置AWG进行功率半导体器件的双脉冲测试
在本文中,宽禁带功率器件供应商Qorvo与Tektronix合作,基于实际的SiC被测器件 (DUT),描述了实用的解决方案··
嵌入式Rust:我们如今身处何方?
Rust对于一般应用开发来说很有意义,但对于嵌入式软件团队来说真的有意义吗?Rust如今的情况如何,它是否就是大家
毫米波雷达与音频技术重塑汽车驾乘新体验
汽车行业的发展正由两大创新领域主导:更为精准可靠的车内感知系统和高质量音频系统。传统方法如增加传感器或
631.2亿美元的市场,创新制造工艺将为柔性电子带来什么?
柔性电子设备的新型制造技术正在迅速涌现。有些人可能想知道它们是否比传统方法更好,以及它们什么时候会商业
广告
热门评论
最新评论
换一换
换一换
广告
热门推荐
广告
广告
EE直播间
更多>>
在线研讨会
更多>>
学院
录播课
直播课
更多>>
更多>>
更多>>
更多>>
广告
最新下载
最新帖子
最新博文
面包芯语
更多>>
热门TAGS
产业前沿
消费电子
技术实例
EDN原创
电源管理
新品
汽车电子
处理器/DSP
通信
传感器/MEMS
模拟/混合信号/RF
工业电子
无线技术
人工智能
制造/工艺/封装
EDA/IP/IC设计
安全与可靠性
测试与测量
查看更多TAGS
广告
×
向右滑动:上一篇
向左滑动:下一篇
我知道了




 最前沿的电子设计资讯
最前沿的电子设计资讯

