
汽车上的总线技术包括:LIN、CAN、CAN FD、FlexRay、MOST及Ethernet。就目前汽车上的应用情况,成本低、可靠性高、应用普遍的有Lin、CAN通讯,CAN FD也是最近几年才逐渐得到应用,CAN FD是对传统CAN总线的一种扩展和过渡,其目的就是Make CAN Fast,首先其不会对原有的整车网络带来大的变更,具备很好的兼容性又具有可观的传输速率。在开发迁移量、时间成本、硬件成本等方面的考虑下,CAN FD在当前阶段是很好的过渡方案。
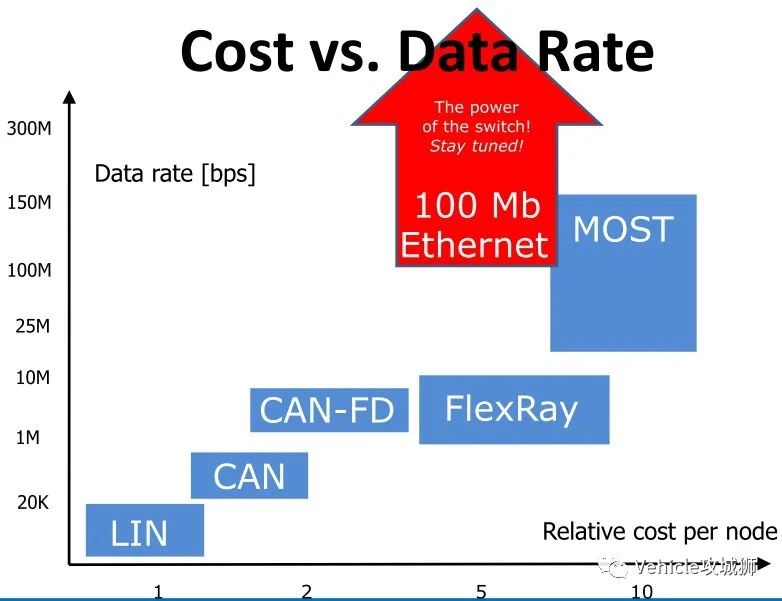
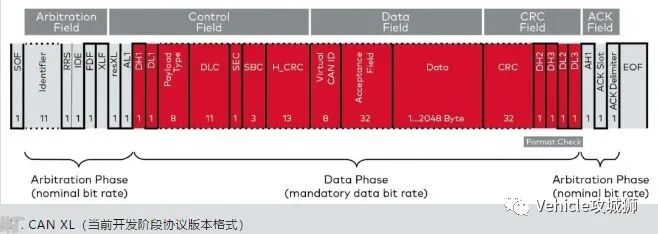
但随着汽车电子电器架构复杂度的提升尤其当前辅助驾驶系统、无人驾驶技术的快速发展,传统的LIN、CAN总线已不堪重负且无法满足未来高带宽的要求,例如无人驾驶技术涉及摄像头、激光雷达等传感器及不同控制器之间大量数据的采集、传输和处理。当同时考虑X-By-Wire应用场景和更高的带宽要求时,CAN FD可能也无法满足,因此对于线控应用场景,FlexRay是一种不错的方案,因FlexRay是专为车内局域网设计的一种具备故障容错的高速可确定性车载总线系统,采用了基于时间触发的机制且具有高带宽、容错性好等特点,在实时性、可靠性及灵活性方面都有很大的优势,非常适用于安全性要求较高的线控场合及带宽要求高的场合。但FlexRay的应用对OEM的能力要求相比CAN会提高很多,同时全部升级为FlexRay会带来开发迁移量、时间成本、硬件成本等方面的同步提升(所有节点必须升级为FlexRay节点)。此外,就我个人观点而言,FlexRay后续得到普遍应用的可能性不是很大,首先成本方面与车载以太网差不多而通讯速率又远低于它,而车载Ethernet在未来得到推广的可能性要比FlexRay高很多。需要注意的是CAN FD在市场推广实施还没有几年,第三代CAN总线-CAN XL也即将登场,CAN XL传输速率将达到10Mbit/s,可填补CAN FD和百兆车载以太网(100BASE-T1)之间的鸿沟,从这点也可以看出车载通讯的快速发展及对通讯带宽的越来越高的要求。

当然所有总线的应用都是分所在的域和场景的,例如对于安全要求很高的场合,采用了基于时间触发机制的FlexRay因实时性和确定性更高可能更合适,再比如在后续基于SOA的高带宽数据传输应用场景,车载以太网则更适合。而对于一些动力域控制器本来就可通过CAN满足需求的何必花精力和额外的成本去用其他总线技术取代。因此相比说要取代,我认为更应该是并存,每种总线技术都有其存在的价值,在满足要求的前提下,采用成本低、成熟的总线技术肯定是首选。

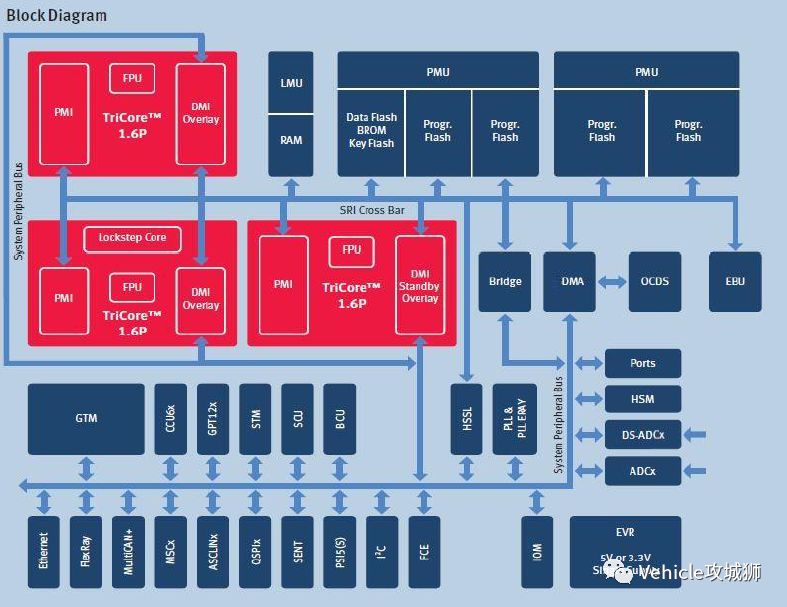
为什么需要多核处理器,我主要基于四点阐述下原因:
1、汽车电子电器架构和整车功能越来越复杂,需要计算能力更强大的硬件来支持越来越复杂的软件功能,随着ADAS、自动驾驶等应用场景的加入及未来域集中甚至中央计算机的E/E架构变更,多核系统的需求将更加明显。

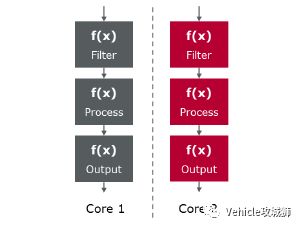
2、并行计算的需求:例如某些功能的输出计算需要多个输入要素在相同时间片内执行并在同一时刻输入到该功能模块。
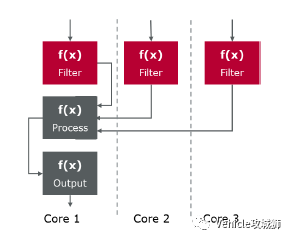
3、相同时间片内多个任务的串行计算需求:例如多个功能需要在相同的时间内被串行执行。
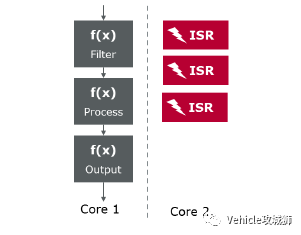
4、系统响应能力的需求:例如对于那些对时间要求特别高的中断处理需要单独在一个核上运行,而周期性任务则放到另外一个核上运行,从而提高整个系统的响应能力。
当然多核系统的软件开发集成相比单核,在项目时间、复杂度、成本以及给攻城狮带来的额外工作量都是成倍增加的。多核处理器的应用也会带来诸多挑战,例如满足ISO26262功能安全的挑战、合理分配各核计算负载、多核系统数据一致性挑战等等。

 最前沿的电子设计资讯
最前沿的电子设计资讯

