首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
图集
全部标签
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
视频工作室
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
NEW
IIC Shanghai 2025
IC设计成就奖投票
标题
简介
内容
作者
全部
标题
简介
内容
作者
全部
首页
资讯
模拟/混合信号
嵌入式系统
处理器/DSP
测试与测量
电源管理
通信
PCB设计
EDA/IP/IC设计
医疗电子
消费电子
汽车电子
工业电子
手机设计
物联网
人工智能
EDN原创
创新/创客/DIY
FPGA
eeTV
技术杂谈
芯品汇
技术
实例
芯品汇
资源
视频中心
在线研讨会
EE直播间
资料下载
小测验
供应商资源
ASPENCORE学院
社区
论坛
博客
问答
下载中心
评测中心
面包芯语
技术文库
E币商城
社区活动
ASPENCORE学院
活动
2024第五届中国国际汽车电子高峰论坛
IIC Shenzhen 2024
2024MCU及嵌入式大会
2024国际AIoT生态大会
IIC Shanghai 2024
IIC Shenzhen 2023
2023第四届中国国际汽车电子高峰论坛
IIC Shanghai 2023
2023全球 MCU 生态发展大会
2023(第四届)国际 AIoT 生态发展大会
更多行业及技术活动
工程师社群活动
专题
用于电路分析和设计的SPICE仿真指南
QSPICE电子电路仿真系列教程
电力电子笔记
数字电子基础
技术子站
电源和信号完整性测试技术中心
泰克智能汽车测试技术中心
福禄克红外热像仪免费试用
芯源半导体MCU技术中心
英飞凌电容感应方案中心
器件射频和材料介电常数测试
是德科技 新能源汽车三电测试技术中心
西门子EDA 3D IC设计解决方案
车载总线测试和解码
Microchip 视频与资源中心
NI最新射频仪器专区
西门子EDA中心
汽车电子专题
E聘
×
杂志声明
我司杂志提供免费订阅,任何第三方平台的赠送或售卖行为均未获得我司授权,我司保留追究其法律责任的权利!
广告
基于SOA架构的开发策略
时间:
2021-09-23
作者:
汽车电子与软件
阅读:
分享
扫码分享到好友
海报分享
面向服务的开发模式已经是为大家熟知的下一代智能汽车开发模式了,由于SOA(Service Oriented Architecture)架构的灵活性和可扩展性,而这个恰恰与“软件定义汽车”的思路不谋而合,因此可以说SOA的发展基础是伴随着软件定义汽车的模式而产生的。
面向服务的开发模式已经是为大家熟知的下一代智能汽车开发模式了,由于SOA(Service Oriented Architecture)架构的灵活性和可扩展性,而这个恰恰与「软件定义汽车」的思路不谋而合,因此可以说SOA的发展基础是伴随着软件定义汽车的模式而产生的。
为了更好的支持车控软件的分布式部署与更新迭代,针对SOA的开发模式,需要在基于信号的服务通讯架构下进行开发,这种新架构下的开发模式本身也存在一定的难度。
SOA系统由一组服务组成,并且其中的总服务包可以依次使用其他的多个子服务,也可以根据需要使用一个或多个服务的应用程序,SOA通常以不同系统间隔表现出不同的功能特性。
为了支持复杂的应用程序,同时在处理分布式和计算资源分配方面提供最大的灵活性和可扩展性,业界均采用AP(Adaptive Platform)作为中间件进行SOA的设计开发,遵循面向服务的体系结构。AP作为HPC(High Performance Controller)类型ECU的重要组成部分,可以统一管理下属OS以及周边资源,使得系统运行时的一切调度、状态和资源消耗都处在一个可控的范围内,以满足车载安全性、确定性的要求。
此外,AP架构可以实现分布式计算,通过某种形式的消息传递进行有效通信。这种基于消息传递和基于通信的架构也可以实现快速和高带宽的有效通信(例如以太网)。
本文将以系统设计和开发者的身份重点讲解如何设计一个SOA架构,并重点说明整个过程中需要完成哪些具体的工作。
j27ednc
SOA开发流程设计
j27ednc
下一代自动驾驶系统将定义整车级SOA软件架构,通过分层部署的方式,将全局变量的服务统筹提取出来(例如车速、时间、车辆状态等),作为共用的软件模块提供服务,实现特定的基础功能软件接口统一,并可灵活部署。
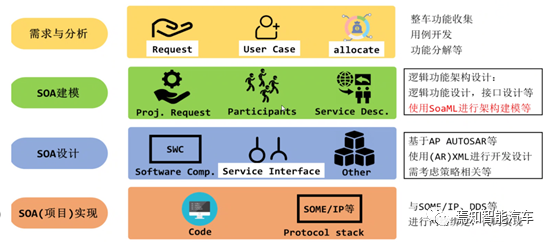
大体上,AP(Adaptive Platform)的开发是一个“从上至下”的流程,其中跟SOA设计相关的有以下几个重要步骤:
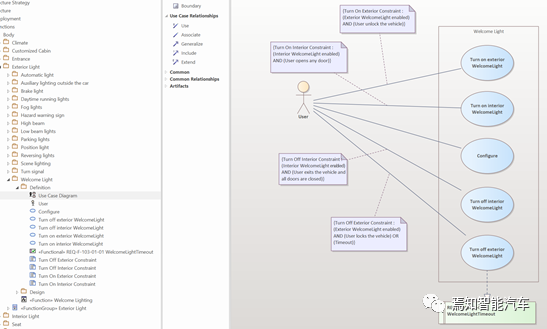
Step1:定义服务内容
此步骤实际上就是搭建了一个系统功能架构,从整车层面即是按照功能需求定义并划分服务。对于SOA中的服务表示了一种独立的功能单元,一个服务可以包含其他子服务单元,使用标准接口进行通讯,将内部信息封装成一个黑盒子,实现子服务的重用性。上层服务可以通过该标准接口调用下层服务封装的子服务内容。同时,整体的服务内容可以被操控单元远程访问和独立更改或更新。同时,对于SOA来说,需要通过服务编排来定义清楚服务之间的相互关系。
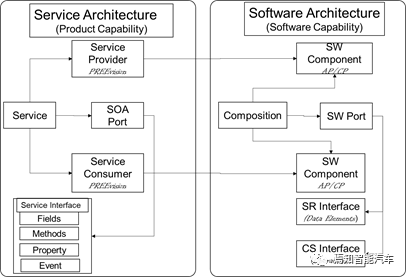
简单地说服务对于智能驾驶汽车而言就是定义产品,对其中产品的能力进行描述,这里的产品能力我们称之为PC(Product Capability)。实现这种产品能力需要从下至上定义硬件抽象服务、平台核心服务、域核心服务、应用程序服务。而每一个服务内容对应着一个或多个实现的软件模块,这里我们称之为SWC(Software Capability)
产品能力 (PC) 描述了系统所需的一些高级功能。区别于系统设计,PC是用来分配职责的,所以很清楚哪个SWC Module软件模块(如摄像头识别模块、雷达识别模块、中央域控制器模块)应该实现什么。它们在功能设计时由功能负责人识别和请求。一些系统相关的PC也可以由系统架构师或模块负责人直接识别,在模块架构工作中映射PC时,模块所有者还可以确定对更多 PC 的需求。
在确定并决定添加
PC
后,对应的软件模块拥有该
PC
,模块所有者负责将其实施到正确的版本,并在平台的整个生命周期内维护
/
发展
PC
。
Step2:定义服务接口
服务接口是一种通信内容定义,其目的在于将服务从功能架构过渡到软件技术架构,且软件模块之间的关系需要被清晰的定义出来,过程中将服务内容封装成相应的接口被实际调用。这种接口定义是独立于通信协议的抽象实体,这种接口可以建立任何两个服务间的通信能力,而使用合适的工具链可以由此生成基于特定协议的接口。
服务接口可分为方法(Method)、属性(Property)、事件(Event)三种类型。以智能驾驶的一个子功能执行接口服务为例,假设需要获取摄像头传感器探测的环境数据,而需要进行定义的服务接口中方法是要对传感器的参数进行后融合,那么就需要其底层服务提供摄像头处理的基础函数(如ISP、深度学习函数、BEV函数等)。而服务接口的属性则是通过一定的方法操作(如get/set)来获取该服务函数,这种服务属性可以对上层调用的服务部分可见,底层服务有变动上层的调用方式也会随之变动,这种变动所带来的更新会由服务底层决定何时发送给上层调用它的服务单元。
服务接口定义完整后,开发人员可以根据该接口定义对其中的函数进行定义开发了。
Step3:配置服务映射关系
此过程会建立软硬件之间的映射关系,实现从抽象的服务定义到软件层面的推导,从而方便实现软件驱动或调用硬件实现单元,这种结果是实现服务与中间件或底层硬件ECU之间的映射关系。从整个SOA的架构模型中我们知道服务需要从通用服务平台开始进行底层驱动,然后对上层传感器执行器的控制管理进行驱动。由于AP直接支持服务接口,可以直接面向上层应用层,CP仍然是对常用的底层应用服务的驱动映射,因此,两层驱动分别对应着经典的CP Autosar中间件调用和AP Autosar模式。
Step4:通讯协议设计
智能网联汽车的SOA架构设计需要强大的环境感知、信息处理、实施决策、控制能力可以把智能交通、地图、定位、通讯、云、大数据等进行系统集成,故车端与云端、车辆与车辆之间、车辆内部的各个ECU之间通信的速率和数据量都比传统汽车高出几个数量级,这些需要由多种复杂的硬件、软件和高速通信总线共同实现,并在很大程度上决定智能汽车的功能实现和扩展的可靠性。车载以太网能够很好的解决大数据量的信息交互,整个通信协议的定义包括虚拟以太网VLAN,以太网交换机Switch,套接字Socket,基于IP的可扩展面向服务的中间件SOME/IP,SD等。而基于AVB的下一代协议TSN(时间敏感网络)可以提供非常优秀的实时性。
以太网通讯设计过程包含对服务实例进行通讯协议相关的信息配置。由于SOA架构中包含多个应用实体之间的多通路通信过程,且这些通信通常是网状通信,因此需要在各个实体节点之间建立中间路由、转化等。区别于传统总线(Can/Lin),在软件架构设计过程中,开发人员需要设计具体的服务类型、服务ID、服务数据类型、服务角色等。
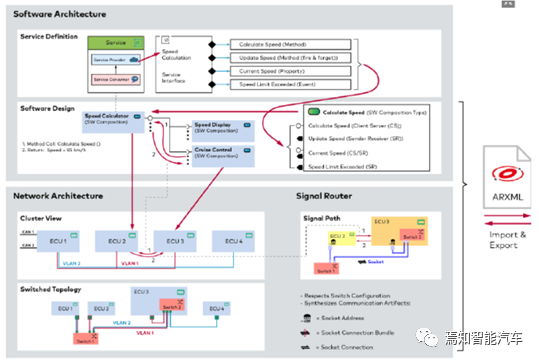
SOA架构设计流程
SOA的逻辑架构内容需要根据分层架构策略分配给一层的多个模块。这些层也被分成几个功能区,使用Enterprise Architect进行架构模型管理是SOA模块架构设计的基础,如下图表示了典型的SOA系统的架构设计模型。
区别于传统Can总线面向信号的设计思路,在以太网设计过程中,开发人员需要在逻辑层面将功能抽象为服务的方式进行架构设计。如上图,从下至上包含了SOA基础服务管理、硬件I/O控制管理、系统功能控制管理、单元域功能控制管理、整车功能控制管理、云端控制管理、人机交互管理。
SOA基础服务管理:
该模块主要是对整车软件模块的基础功能(例如诊断管理、驱动管理、存储、日志记录、OTA等)进行分解并统一管理。
SOA硬件I/O控制管理:
该模块主要涉及对SOA中的传感器&执行器进行的相应管理,包括定义传感器输入源硬件(Camera、Radar、Lidar、Uss、GPS等),定义执行器输入输出源硬件(方向盘、制动踏板、转向电机、车门车窗、电源电池、蓝牙wifi等)。传感器执行器层中的所有模块都必须包含其各自设备的功能设备驱动程序 (FDD)。设备管理模块将包含所有 ECU 使用的通用 ECU 设备驱动程序 (EDD)。
SOA系统功能控制管理:
以SOA服务所需要实现的系统内部作为划分区间,将对特定功能进行控制的特殊功能服务,例如比如ADAS系统将传感器输入的信息进行统一初级信息处理(如ISP、加串解串、原始点云处理)。
单元域功能控制管理:
对系统内部功能进行协调的功能服务,如ADAS系统中利用深度学习进行环境信息检测、传感器信息融合,同时在动力学模型中进行车辆运动控制、车身姿态控制。
整车功能控制管理:
对单个整车内的系统进行调度的功能服务,包括协调运动控制单元、动力系统、车辆安全相关的能力,特别是车身安全上需要充分考虑智能网联车辆的功能安全设置相应的软硬件安全门槛。
云端服务管理:
云端管理可以是以总监控台管理的该车辆及其周边车辆、基础设施相关的功能服务,例如网络安全管理、云端计算服务、软件升级等协同控制。
基于以太网的SOA架构设计,需要开发人员明确4个问题:
服务提供者(Provider)+ 服务·类型(Service)+ 客户端(Consumer) + 服务接口(Service Interface)。
一般的,对于SOA系统架构设计过程中可使用面向对象的设计工具进行设计。如前所述对于服务来说我们需要首先进行产品能力PC定义,对应于该服务模块需要设计相应的服务软件模块组建SWC。其中服务组件包和软件组件包的设计流程分别如下:
如上过程的设计和配置完成之后可采用一些现有的SOA开发工具PREEvision生成Arxml文件。该文件区别于CAN/CANFD/LIN总线的DBC和LDF等数据文件,Arxml包含了SOA架构设计所有相关的服务、属性以及服务的软硬件实现方式,成为了以太网总线开发的通用标准数据接口。
总结
SOA架构主要优势是可以很大程度上实现软硬解耦,通过软件升级OTA可以更加方便灵活的实现服务实体有效部署在任意的域控制器上,而且可以在售出车辆上调整部署策略。
同时,SOA的衍生功能是可以在汽车功能安全方面实现有效的冗余部署。例如,对于安全性要求比较高的智能驾驶功能可以实现双重制动冗余配置,同时在车端布置双重中央域控制服务,确保当一个域控制器失效时,那么另外一个域控制器上的备用服务实例立刻启动,重新与服务使用者建立连接,以保证功能的正常运转,借此实现冗余机制。
对于SOA来说,是需要在AP Autosar流程下设计从服务定义到服务实例化的整个过程,为了实现在算法和软硬件调用中的有效通信,就需要设计有效的通信协议,对于SOA来说基础的通信协议除了Can以外,最基本的就是以太网的通讯设计。
文章来源及版权属于汽车电子与软件,EDN电子技术设计仅作转载分享,对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如有疑问,请联系
Demi.xia@aspencore.com
阅读全文,请先
汽车电子与软件
汽车电子与软件
进入专栏
汽车电子
产业前沿
分享到:
返回列表
上一篇:
拆解:amazon亚马逊20W双口车载充电器
下一篇:
电动汽车需要多少碳酸锂和钴?
微信扫一扫
一键转发
最前沿的电子设计资讯
请关注
“电子技术设计微信公众号”
推荐内容
兴趣推荐
拆解报告:倍仕达45W USB-C氮化镓快充充电器K46
近期倍仕达又推出了一款45W充电器,产品基于前沿的氮化镓技术进行设计,效率以及可靠性等相比传统充电器表现更
拆解报告:EDIFIER漫步者Fit900NB头戴式降噪耳机
漫步者Fit900NB头戴式耳机支持主动降噪功能,包括深度降噪、舒适降噪、防风噪、环境声4种降噪模式,最大降噪深
拆解报告:Baseus倍思AirNora 3真无线降噪耳机
近期,消费电子品牌Baseus倍思推出了一款专为女性用户设计的全新产品——AirNora 3,外观上充电盒采用了“小香
英伟达的“物理人工智能”,会带来哪些改变?
在2025年CES大会上,英伟达创始人兼首席执行官黄仁勋通过长达90分钟的主题演讲,宣告人工智能进入“物理人工智
25年第1周人形机器人周报:三星重金投入机器人
2025 年被视为人形机器人商用元年,国内外科技巨头纷纷布局。工信部曾发布指导意见,推动人形机器人发展···
吉利发布“智能汽车全域AI”,极氪智驾控制器应用英伟达Thor芯片
在CES 2025上,吉利以及极氪品牌分别出牌,发布了一系列重磅内容和产品···
拆解报告:极空间T2私有云
极空间T2私有云内置M.2固态硬盘用于数据存储,并使用USB-C接口供电,能够方便的使用自带的电源适配器和移动电源
2024年超半数手机采用高通骁龙处理器
通过分析2024年度各大品牌发布的新机,充电头网了解到,骁龙8 Gen3处理器应用次数最多,有35款产品采用该型号处理
CES|长城汽车:成为全球化科技公司!
在2025年CES展会上,长城汽车展示了全新蓝山SUV、灵魂摩托S2000等核心产品,以及Hi4动力架构和智能座舱等前沿技
机器人所需要的传感器有哪些?
随着机器人技术的迭代升级,传感器的重要性将持续提升,其功能性、精度和适配性也将得到显著改进,作为机器人不可
拆解报告:极空间私有云Q2C
极空间私有云Q2C支持使用3.5和2.5英寸硬盘进行数据存储,支持单盘22T容量。私有云采用有线网络连接方式,为固定
2024年汽车终端销售数据全面盘点!
12月的汽车终端销售数据出来了,12月销量276.3万辆 , 2024年全年销量为2336.3万台···
新加坡11月汽车市场,比亚迪排第二
2024年11月,新加坡新轻型汽车销量达3,606辆,同比增长41.9%···
为什么织好的毛衣不会散架?科学家也刚知道是怎么回事
为什么织好的毛衣不会散架呢?科学家们最近发现了其中奥秘。这其中涉及到我们生活中常见的摩擦力以及物质的态
拆解报告:等离子高速吹风机YA-V1
本期拆解的这款等离子高速吹风机具备四档风温和两档风速调节,吹风机内置距离传感器,能够检测与物体距离,过近时
拆解报告:小米超薄充电宝5000mAh
近期小米推出了一款5000mAh卡片充电宝,机身薄至10mm,外观典雅大气。机身设有USB-C接口,支持最大PD 20W输出和18
拆解报告:联想thinkplus 30W迷你氮化镓充电器
联想thinkplus 30W迷你氮化镓充电器延续口红系列风格设计,整体小巧美观,充电器支持QC3.0/4+、FCP、SCP、AFC、
特斯拉销量十年来首次下滑,跌在哪里了?
2024年,特斯拉全球交付量为178.92万辆,同比下降1.1%,这是公司十年来首次年度销量下滑。尽管全年产量和交付量接
拆解报告:OPPO磁吸移动电源5000mAh
OPPO磁吸移动电源5000mAh拥有10W的无线和有线快充能力,支持12W最大输入功率,外观精美轻薄,配备电源开关键和LED
Nvidia Omniverse:物理人工智能后面的“软核心”
GPU的进步正深刻重塑着众多行业,英伟达凭借其技术创新不断拓展产业边界。继 CUDA 之后,Omniverse 极有可能成
使用MSO 5/6内置AWG进行功率半导体器件的双脉冲测试
在本文中,宽禁带功率器件供应商Qorvo与Tektronix合作,基于实际的SiC被测器件 (DUT),描述了实用的解决方案··
嵌入式Rust:我们如今身处何方?
Rust对于一般应用开发来说很有意义,但对于嵌入式软件团队来说真的有意义吗?Rust如今的情况如何,它是否就是大家
毫米波雷达与音频技术重塑汽车驾乘新体验
汽车行业的发展正由两大创新领域主导:更为精准可靠的车内感知系统和高质量音频系统。传统方法如增加传感器或
631.2亿美元的市场,创新制造工艺将为柔性电子带来什么?
柔性电子设备的新型制造技术正在迅速涌现。有些人可能想知道它们是否比传统方法更好,以及它们什么时候会商业
广告
热门评论
最新评论
换一换
换一换
广告
热门推荐
广告
广告
EE直播间
更多>>
在线研讨会
更多>>
学院
录播课
直播课
更多>>
更多>>
更多>>
更多>>
广告
最新下载
最新帖子
最新博文
面包芯语
更多>>
热门TAGS
产业前沿
消费电子
技术实例
EDN原创
电源管理
新品
汽车电子
处理器/DSP
通信
传感器/MEMS
模拟/混合信号/RF
工业电子
无线技术
人工智能
制造/工艺/封装
EDA/IP/IC设计
安全与可靠性
测试与测量
查看更多TAGS
广告
×
向右滑动:上一篇
向左滑动:下一篇
我知道了






 最前沿的电子设计资讯
最前沿的电子设计资讯

