
执行管理是AP的一个功能组件,负责平台初始化和应用的启动/停止,它基于一个或多个manifest文件来执行上述动作,比如可执行程序何时启动,在哪启动。
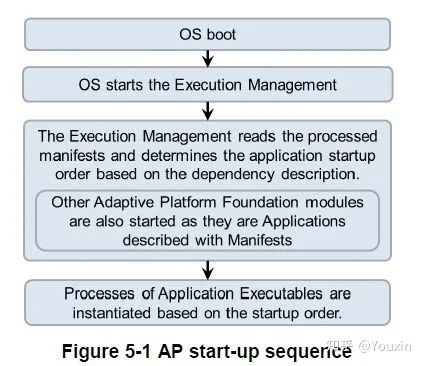
当机器启动之后,OS会初始化EM作为初始进程,EM再加载其他的功能组,当平台基础组件运行起来之后,EM再根据Machine Manifest和Execution Manifest来按顺序启动平台应用和普通应用。
AP的应用以进程为单位,启动指的就是启动一个进程。
1. 平台生命周期管理。
EM作为AP平台启动的一部分被启动,负责AP平台和部署的应用初始化。
2. 应用生命周期的管理。
EM负责按顺序启动和停止部署的应用,基于Machine Manifest和Execution Manifest,从配置的应用依赖关系得出启动/停止的顺序。
基于机器状态和功能组状态,应用可能在机器启动阶段被执行,也可能是之后的某些阶段,可预见的是许多应用都不会立即执行。
EM不负责应用的运行时调度,这是OS的工作,然而,EM负责初始化/配置OS来使它能执行必要的运行时调度(信息从Manifest中来)。
确定性执行提供了一种机制:使用一个给定的输入数据集,在规定时间内总是给出相同的输出。
个人理解:要理解确定性执行,首先要知道程序运行中哪些是不确定的,时间上的不确定(有时执行快,有时执行慢),资源上的不确定(动态内存分配,线程分配等)和其他随机的不确定性。
EM提供了时间确定性和数据确定性,前者指的是在截止时间前总是能产生输出,后者说的是输出和内部状态总是相同。
EM提供的支持集中在数据确定性上,因为时间确定性可以由提供充足的资源来处理。
EM提供了一组确定性客户端API来支持控制进程内循环,一个确定的线程池,激活时间戳和随机数。
进一步地,确定性执行可选支持软件锁步,冗余地执行应用,并对结果进行比较。
AP平台允许在同一个机器上执行多个应用,因此确保要确保它们之间不受干扰。
行为不正当的程序在影响其他程序方面应该被限制,例如,一个程序应避免消耗多于配置的CPU资源,这会影响其他应用。
EM支持通过配置进程资源组来避免干扰,每个资源组可能对CPU时间或内存进行限制。
EM负责基于状态的进程启动/停止的管理,所以它有 特殊的权限来启动和停止进程。
PHM监测进程,当不符合预期时,可以触发一个恢复动作,这个恢复动作在Execution Manifest中进行配置。
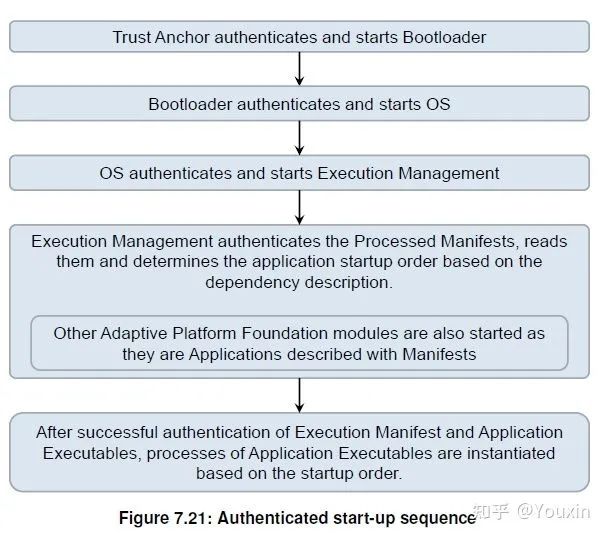
为了保证系统功能的正常,确保可执行文件的合法来源是很重要的。
实现可信平台的关键属性是信任根,信任根通常是存储在安全环境中的一个公钥,比如存在不可修改的持久化区域内或在HSM(硬件安全模块)内。
系统设计者负责确保系统开始于信任根,直到EM模块被加载。
基于系统设计者选择的机制,整个系统的完整性和可信度可能在启动时都被检查过,但如果系统设计者只确保了已经执行过的程序的完整性和可信度,那么EM在控制整个系统时就要担负起相应的职责,继续信任链的建立,这需要集成者正确配置EM。
一个例子:从信任根传递信任到OS和AP,可能看起来是这样的:
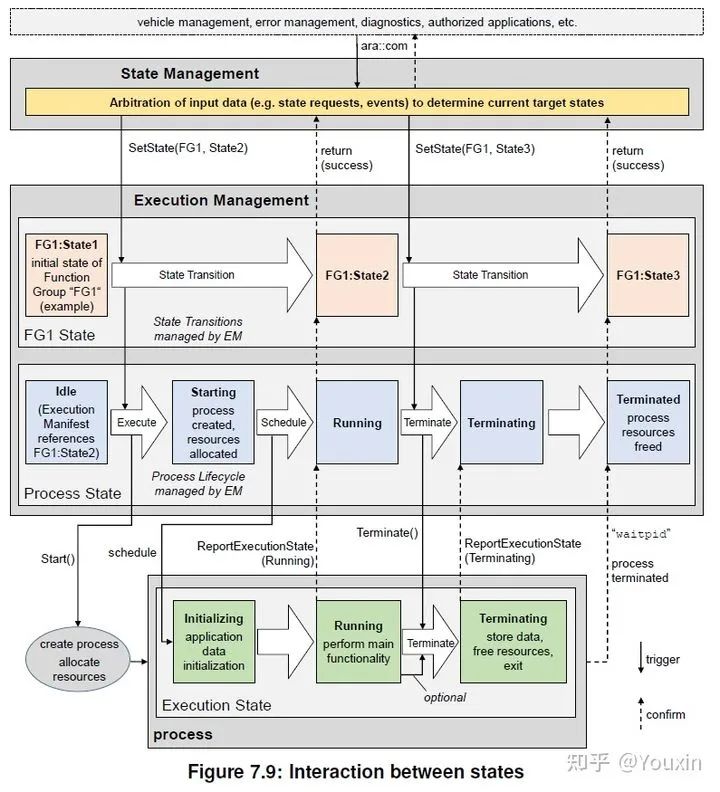
状态管理功能集(SM)定义了AP平台的操作状态,EM负责执行不同状态的切换。
Execution Manifest允许定义进程必须在哪些状态下运行,状态管理机制确保了只有在需要时,进程才会执行。
和EM有关的状态有四种:
执行状态-每个启动的进程的内部状态,是一个枚举(Initializing->Running->Terminating)
进程状态-进程的状态,被EM内部状态机管理
机器状态
功能组状态
EM要求至少每个机器至少配置有一个功能组,这个功能组叫做“机器状态”功能组,它的功能组状态叫做机器状态,代表了机器的全局状态。
“机器状态”功能组有一些标准强制的状态:
除此以外,也可以根据需求定义其他的状态。
功能组状态(包括机器状态),定义了当前运行的进程集合。每个APP可以在Execution Manifests里声明它应该在哪个功能组状态里运行。
机器状态(包括其他功能组状态)由SM来请求,活动的状态集受车辆范围内的事件和模式显著的影响。
EM应该确保Startup状态已经配置到名为MachineState的功能组里。
EM应在启动后自己触发到Startup的状态转换。
当完成Startup的状态转换后,EM应通知SM,MachineState已经是Startup状态了。
除了Machine State的Startup状态,其它的功能组状态(包括MachineState的其他状态),都不能自己来触发转换,这其实有个隐含的规则,外部必须始终有一个程序实体能够控制其他功能组状态的转换,这通常是SM,所以SM应当能在Machine State的所有状态下运行。
EM本身不执行OS的停止(因为和OS强耦合了),它需要至少一个进程提供机制来关闭OS,这个进程被期望配置在Machine State的Shutdown状态下。
EM应确保在名为MachineState的功能组下有一个Shutdown状态。
请求EM切换到Shutdown和其他功能组状态一致,对于EM来说,各个状态都是独立的,外部请求状态切换,EM都会执行,但对于SM来说,不同功能组之间的状态是耦合的,所以AUTOSAR假定SM只会在合适的时候请求Shutdown。
如上所述,SM在Shutdown模式下也应该保持运行,状态切换对于系统来说只是很小的工作,有很多原因会导致失败,所以SM必须在Shutdown模式下保持存活,以便处理错误等。
这个模式的目的是以干净的方式关闭机器(包括SM),这也意味着某些时候,SM将不再存活,接下来的错误都要用特定方式来处理。
EM不执行OS的重启,为了重启系统,它要求至少有一个进程提供重启OS的机制,这个进程运行在Machine State的Restart状态下。
如果在机器上安装了一组功能一致的应用,那么有一起控制它们的能力是很重要的,因此AP提出了功能组的概念。
每个功能组有着它自己的进程集和状态集(功能组状态),每个功能组状态定义了当SM请求激活哪个状态时,哪些进程将会被EM启动,每个功能组至少有一个进程,最多由实现限制。
功能组机制非常灵活,它倾向于作为一个控制应用的进程启动和停止的工具,系统集成者可以将进程分配到功能组状态,然后用SM来请求它。
总得来说,机器状态用来控制机器和平台级别的应用的生命周期(启动/停止/重启),其他的功能组状态单独控制属于同一功能的用户级别应用,当然这并不意味着所有的平台级应用都必须要被机器状态控制。
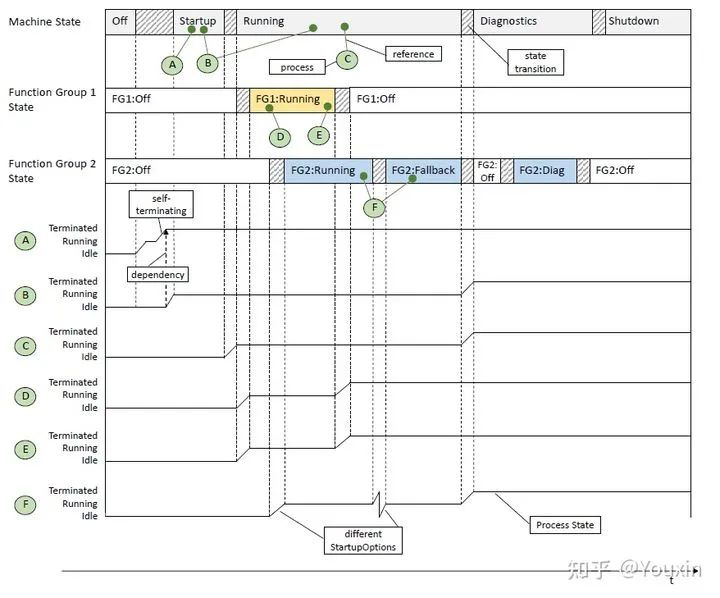
下图是一个示例,描述了状态转换的序列,有机器状态和额外的两个功能组FG1和FG2的功能组状态,为了简化,进程状态只有静态的三种Idle,Running和Terminated。
系统的设计和集成应当确保任何时刻机器的资源都是足够的,比如,需要考虑当所有进程启动时最大的资源总和。
一个进程必须分配到一个,且只能分配到一个功能组
Off States
每个功能组(包括MachineState),有一个Off状态作为EM的默认功能组状态。
对于MachineState,EM启动会以最快的速度启动状态转换,从Off状态切换到Startup状态。
进程在它们的Exectuion Manifest中引用它们想要执行的状态,这些状态可以是任何状态,包括机器状态。
在收到状态改变请求时,EM会终止不需要的进程集,在向SM确认状态修改前会启动新的进程集。
状态转换
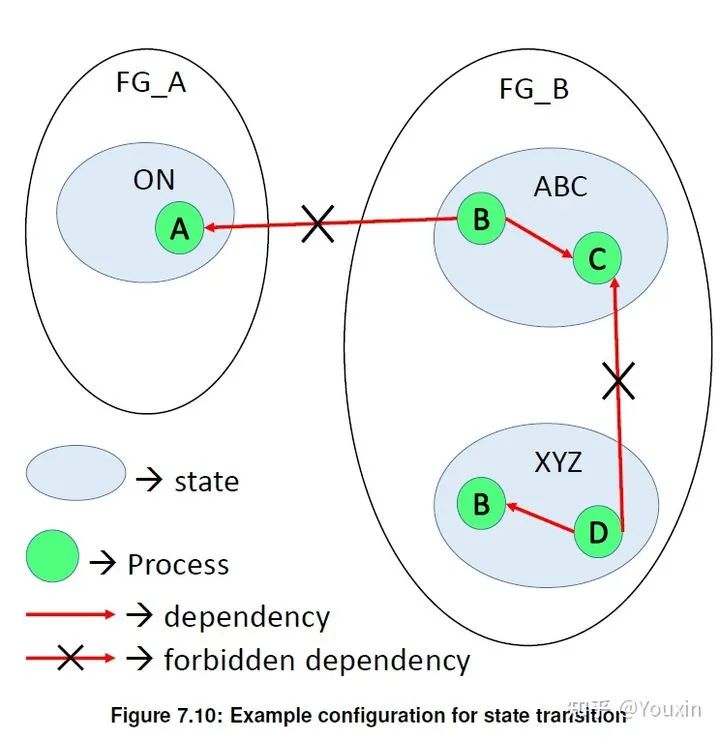
首先AUTOSAR禁止不同功能组之间的进程相互依赖,因为这会导致进程在没有配置的状态下被启动。
从上图可知,每个功能组是相互独立的实体,一个功能组的状态转换对其他功能组没有副作用,当然这是从EM的角度来看的,从SM来说则不同(SM需要处理状态机)。
EM判断进程是否在运行,是检查进程状态是否在Idle或Terminated,如果是,则说明进程是停止状态。
进程停止超时
EM会监控每个进程停止的时间,默认超时时间在Machine Manifest中配置,但每个进程可以在Exectuion Manifest中重写这个超时时间。
当停止超时之后,EM会请求OS直接杀死进程(对于POSIX来说,使用SIGKILL信号)。
同时,EM会向SM报告错误,指明不能满足状态转换。
进程启动超时
EM会监控进程从创建到报告Running的时间,如果超时,则认为发生错误。
超时时间由每个进程的Exectuion Manifest配置,但特殊的不报告状态的进程这个时间为0。
发生超时后,EM会要求进程停止,如果进程不按要求停止,EM会请求OS直接杀死进程,当进程停止后,EM会重启数次(根据配置),直到成功或最终失败。
同样,EM也会向SM报告不能满足状态转换。

 最前沿的电子设计资讯
最前沿的电子设计资讯

