
汽车智能化浪潮已经来临,智能驾驶的竞争也日趋激烈,传统主机厂与Tier1供应商、造车新势力、互联网巨头、创新科技公司都想要从智能化的进程中分一杯羹。
那么,揭开表面的营销,过滤掉资本的泡沫,单从产品表现和技术能力上来评判,当前的智能驾驶水平到底怎么样?主流产品都有什么样的特点?我们近期专门选取了几款市场上已经量产的主流智能驾驶产品,进行对标测评。
本次我们测评的对象是特斯拉Model3、蔚来ES8和小鹏P7,软件均已升级到2021年5月以后的版本。
我们的测评从两个维度展开:(1)细分场景下的功能表现;(2)人机交互效果。
文末附有几款主流产品的配置与技术演化路线,作为本次测评的补充信息。
一:细分场景下的功能表现
本次测评,我们直接对标了3款车型的最高阶智能驾驶功能:高速领航辅助驾驶,即Model3的NOA功能,ES8的NOP功能,以及P7的NGP功能。
1.1 场景范围与分类
从场景来看,主要有车辆在本车道巡航和自动变道两大类场景,这两大类场景则可细化到表1和图1~图7中的各类细分场景。
|
序号 |
一级场景 |
二级场景 |
场景说明 |
|
1 |
本车道巡航 |
定速巡航 |
无前车,按设定的车速行驶 |
|
2 |
本车道巡航 |
跟车巡航 |
有前车,按设定的跟车时距行驶 |
|
3 |
本车道巡航 |
跟停与起步 |
随前车的停止与起步而动作 |
|
4 |
自动变道 |
超车变道 |
前车速度低,变道超车 |
|
5 |
自动变道 |
导航变道 |
为实现导航的路径规划而变道,典型如进出匝道 |
|
6 |
自动变道 |
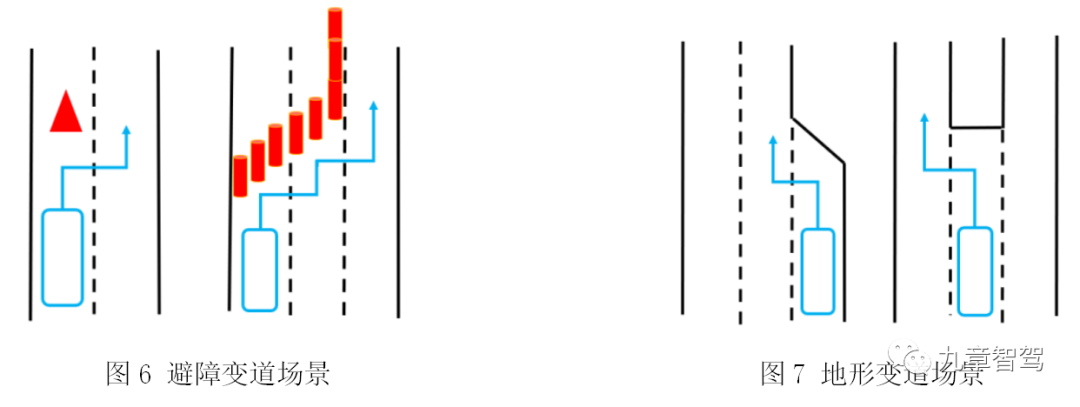
避障变道 |
为躲避道路障碍物而变道 |
|
7 |
自动变道 |
地形变道 |
因车道线改变而变道,如车道线合并、分叉等 |
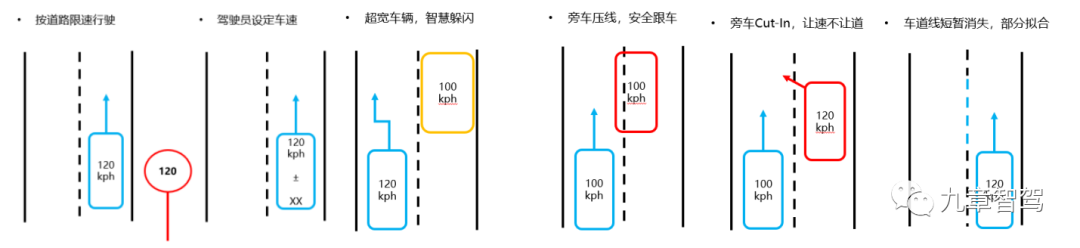
图1 定速巡航场景
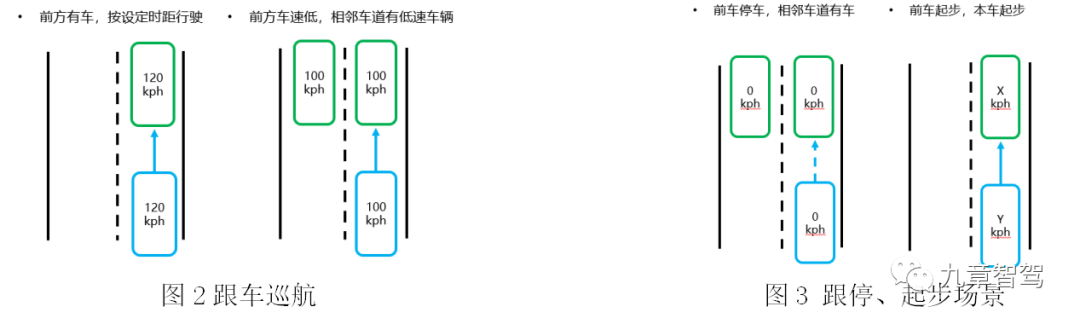
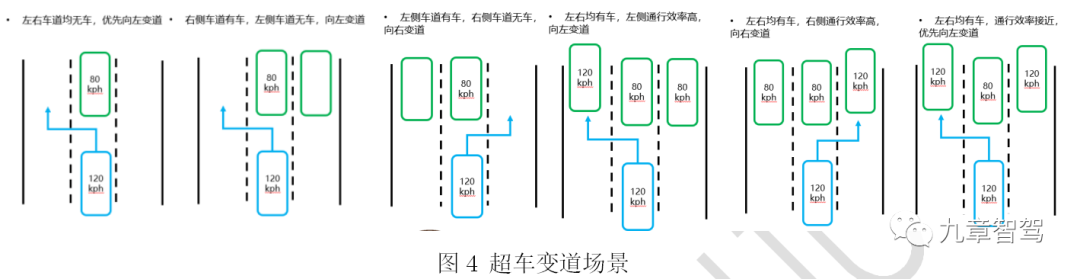
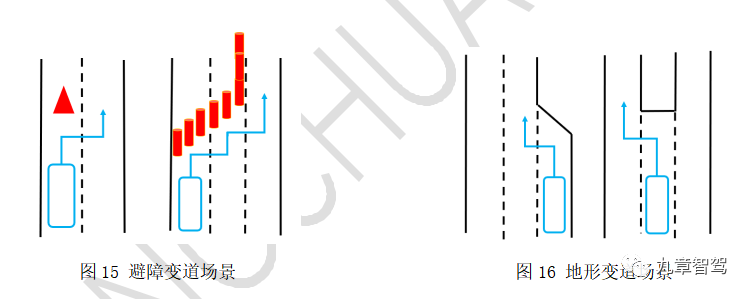
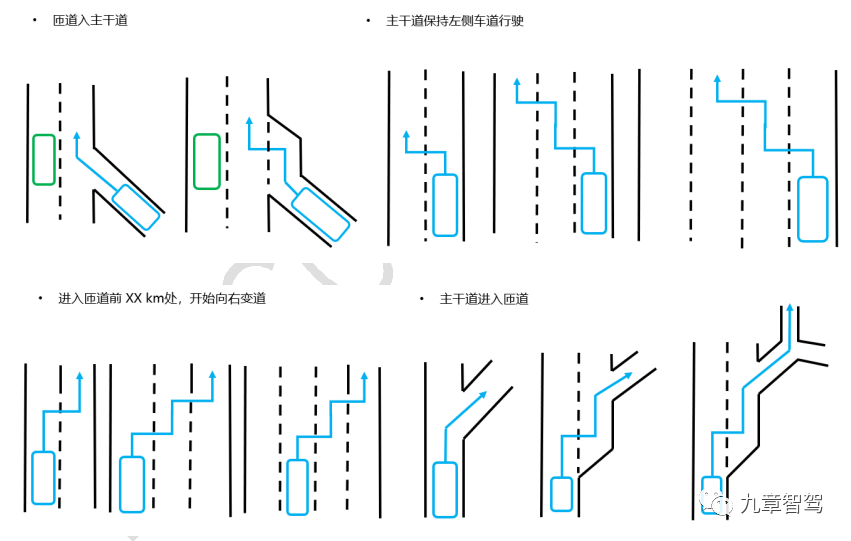
图5 导航变道场景
2.2 巡航场景下的功能表现
表2 巡航场景的功能表现(蓝色字体是表现不同项)
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3 变道场景下的功能表现
在自动变道场景中,3款产品的功能表现有较大差别,体现出不同的性能差异和驾驶风格。
超车变道时,Model3只要被压速,就会寻找时机变道超车,而ES8和P7则会耐心等待,只有速度被压制到一定程度时,才会主动变道。
在车道选取的策略上,三者都符合常理地选择车流量小的车道,但Model3对于左右车道没有优先级,而ES8和P7则符合中国的驾驶规则,优先向左变道。
Model3对于自己的变道决策结果非常自信,只要决定变道,就一定会找机会完成,ES8和P7则会在多次失败后,终止变道决策。
导航变道时,Model3汇入主路后不能自动调节车速,需要驾驶员手动调节,这一项体验很差。
汇入主路后,Model3不向左侧车道变道,ES8和P7自动变道至最左侧车道,这都不是最优策略,我们认为,四车道自动选择左侧第二车道,双车道和三车道自动选择最左侧车道,更加符合国情。
由于Model3没有融合高精地图,因此汇入主路的成功率较低,而ES8的感知能力偏弱,需要有过渡路段才能提高汇入主路的成功率,P7则凭借良好的感知能力与高精地图,达到了80%的汇入主路成功率。
在驶出主路进入匝道时,Model3和P7都表现出较高的成功率,而ES8由于感知能力不强,成功率偏低。
进入匝道前,3款产品都有提前变道和减速的动作,但是提前的时机和减速时机各不相同,并且与当时的交通车流量也有关系。
驶出ODD进入收费站时,ES8不减速,这一点体验感差。
对于路面有障碍物的场景,3款产品都是优先减速,但Model3直接减速至停车,而ES8和P7会同时做出适当的转向避让动作,体验感较好。
车道线合并的情况下,三者成功率都不高,猜测是受当前感知能力的限制,期待后需的提升。
变道过程中如有驾驶员干预,三者的处理方式大同小异,除了驾驶员踩油门的操作外,系统都会退出或暂停功能。不同之处在于退出的时机,以及系统是否自动恢复接管。
表3 变道场景的功能表现(蓝色字体是表现不同项)
|
超车变道 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4 功能表现总结
Model 3的感知功能强大,风格激进,安全性偏低,测评时多次出现危险状况,需人工接管的次数多。同时特斯拉过于依赖视觉感知的结果,与导航和地图的融合度低,会出现走错路的情况。
ES8受限于硬件,感知功能弱,风格偏保守,安全性相对高,但牺牲了通行效率。蔚来的场景感知与导航信息融合度高,不会错过匝道口等涉及全局路径规划的场景。
P7的感知功能达到特斯拉水平,同时风格偏保守,更符合中国道路场景,兼顾了通行效率和安全性。小鹏的场景感知融合了高精地图,感知效果更准确。
当前主流的产品仍有改进空间,如收费站场景,目前还不能自动驶出;如可以考虑设置不同的自动驾驶模式,满足不同驾驶风格消费者的用户体验等。
二:人机交互效果
对于三款产品的人机交互效果,我们同样根据不同的应用场景进行测评。
表4 人机交互的场景
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.1 功能开启与激活的操作方式
三款产品的功能开启方式相同,都通过车机里的软开关控制,但激活方式各不相同。
Model3完全颠覆了传统汽车的操作方式,采用拨杆操作;ES8完全保留了传统的操作方式,采用按键操作;P7则采取折中方案,同时采用拨杆和按键,控制不同的模块。
表5 功能开启与激活方式
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

图8 Model3 NOA的开关方式

图9 ES8 NOP的开关方式

图10 P7 NGP的开关方式
(图片来源http://baijiahao.baidu.com/s?id=1660603366954782047&wfr=spider&for=pc,http://www.yidianzixun.com/article/0SqFSNEL?s=sd24&appid=s3rd_sd24)
2.2 功能退出与预警的表现
三款产品的正常功能退出方式,与功能开启激活方式相同。
在驾驶员干预的情况下,对于驾驶员踩制动的处理方式相同,功能退出,车辆交给驾驶员接管;对于驾驶员转动方向盘的处理方式中,ES8只是暂停功能,根据驾驶员的转动时间,决定是否自行恢复功能,Model3和P7都是直接退出功能。
三款产品都采用方向盘力矩检测的方式来判断脱手,其中Model3的阈值设定较大,很容易误报,ES8和P7则表现正常。
Model3由于没有启用DMS(驾驶员监测系统),因此不能判断驾驶员是否存在疲劳和分心的情况,ES8和P7则会实时监测驾驶员状态,并分级预警,保证安全。
总体来说,ES8对驾驶员干预的退出机制相对保守,部分条件下可以自动恢复功能,而Model3和P7则直接退出,交由驾驶员接管。
表6 功能退出与预警(蓝色字体是表现不同项)
|
序号 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
表7 巡航场景的显示效果(蓝色字体是表现不同项)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

图11 Model3 NOA的巡航显示效果

图12 ES8 NOP的巡航显示效果

图13 P7 NGP的巡航显示效果
2.4 变道场景的显示效果
变道场景中,三款产品的显示内容相似,都会显示目标车道、目标车位、危险车辆等信息,但风格和效果不相同。
Model3通过方向盘振动提醒驾驶员车辆即将变道,提高了安全性,但显示效果中缺少变道过程的动态实时显示,并且看不出导航变道时匝道的效果。
ES8会通过引导线的方向和弯曲程度,实时显示变道过程,但是对目标车道的提示不够明显,并且缺少振动提醒,好在有语音提示,也能达到提示的效果。
P7对目标车道和变道全过程的显示效果都不错,美中不足的是缺少振动提醒,不过语音提示效果也不错。
表8 变道场景的显示效果(蓝色字体是表现不同项)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
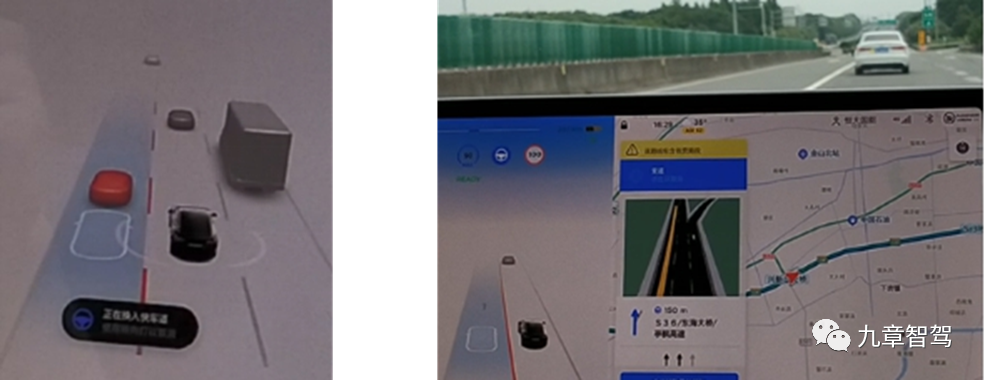
图14 Model3 NOA的变道显示效果

图15 ES8 NOP的变道显示效果
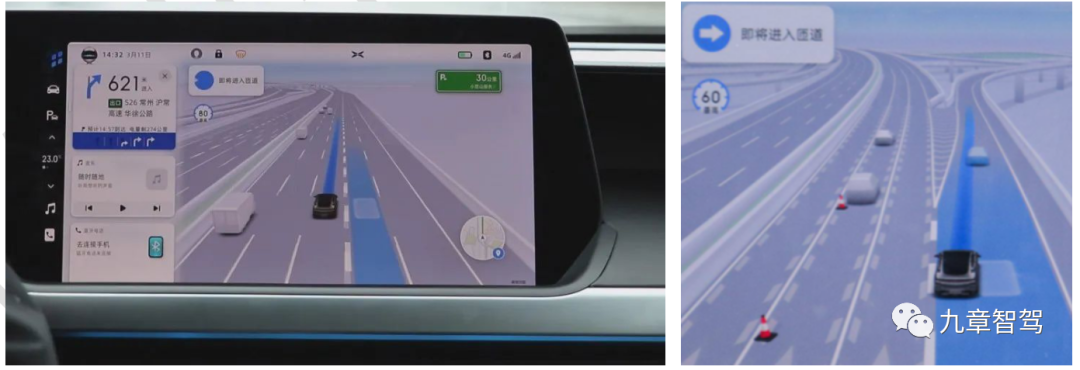
图16 P7 NGP的变道显示效果
(图片来源https://new.qq.com/rain/a/20210312a04jxk00)
2.5 人机交互总结
Model3人机交互风格简洁,显示的信息量少;缺失语音交互,体验感不好。
ES8人机交互风格相对复杂,显示的信息量大;ES8的操作以按键为主,偏传统;ES8有语音交互和HUD显示,提升了用户体验。
P7人机交互风格偏复杂,显示信息量大;P7的功能操作方式结合了拨杆和传统按键的方式;P7的显示风格与ES8接近;P7的语音交互体验感好。
目前主流产品的人机交互显示效果已经能显示主要的道路和障碍物信息,但还不够完整和真实,相信随着感知性能和车机性能的提升,显示效果会逐步提升,达到真正的场景重构效果。
以上,就是我们本次对三款产品的全部测评内容,受道路环境、法规和主观因素的影响,内容准确度难以达到100%,但在一定程度上可以为产品开发和验证提供参考。
随着特斯拉、蔚来、小鹏不断地推陈出新,以及其他厂家的新产品不断亮相,相信高级智能驾驶功能会越来越完善,越来越安全。
|
序号 |
对标项 |
TESLA Model 3 |
NIO ES8 |
XPENG P7 |
XPENG P5 |
NIO ET7 |
|
|
1 |
传感器配置 |
前视摄像头 |
3 |
3 |
4 |
3 |
2 |
|
侧视摄像头 |
4 |
0 |
4 |
4 |
4 |
||
|
后视摄像头 |
1 |
0 |
1 |
1 |
1 |
||
|
环视摄像头 |
0 |
4 |
4 |
4 |
4 |
||
|
毫米波雷达 |
1 |
5 |
5 |
5 |
5 |
||
|
超声波雷达 |
12 |
12 |
12 |
12 |
12 |
||
|
激光雷达 |
0 |
0 |
0 |
2 |
1 |
||
|
2 |
高精地图 |
无 |
百度 |
高德 |
高德 |
百度 |
|
|
3 |
计算平台 |
FSD HW3.0 * 2
144TOPS |
Mobieye EyeQ4
2.5TOPS |
NVIDIA Xavier
30TOPS |
NVIDIA Xavier
30TOPS |
NVIDIA Orin * 4
1016TOPS |
|
|
4 |
量产时间 |
2019 |
2019 |
2020 |
2021 |
2022 |
|
|
5 |
价格(¥) |
6.4W |
3.9W |
3.6W |
/ |
/ |
|
图17~图22可以看出Model3/ES8/P7的传感器具体布置方案以及探测范围,表10对这三款产品的传感器探测距离作了定量的说明。
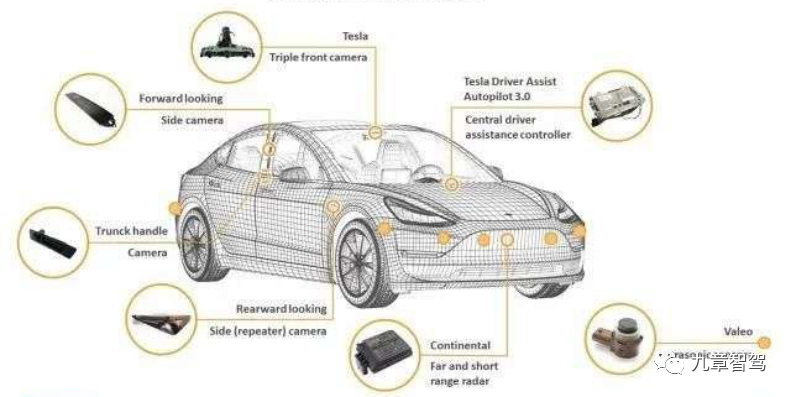
图17 Model 3的传感器
(图片来源https://36kr.com/p/1243708023507971)
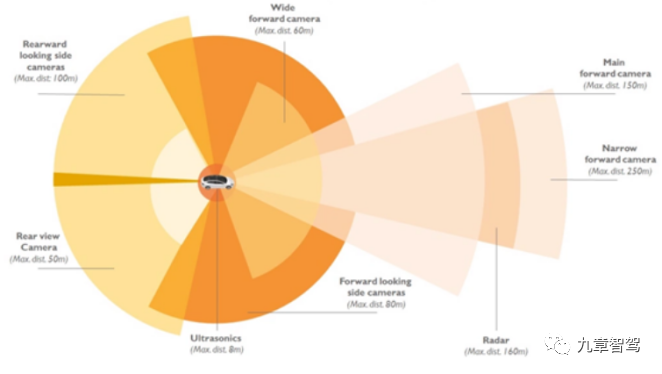
图18 Model 3的探测范围
(图片来源https://news.mydrivers.com/1/697/697355.htmjd)
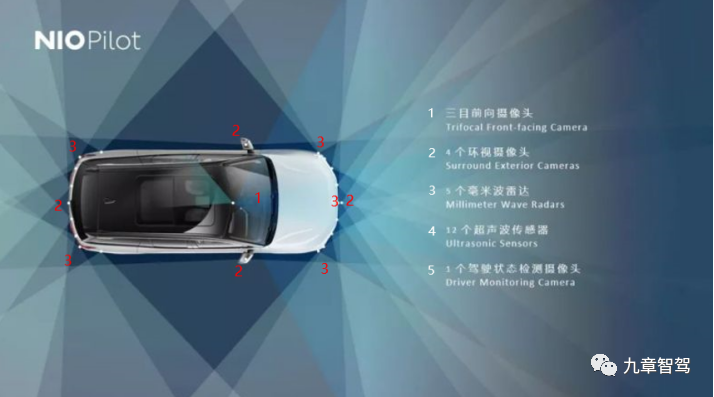
图19 ES8的传感器
(图片来源https://www.sohu.com/a/301101089_256868?referid=001cxzs00020004)

图20 ES8的探测范围
(图片来源https://news.yiche.com/hao/wenzhang/31218425)

图21 P7的传感器
(图片来源https://www.sohu.com/a/439658882_430289)
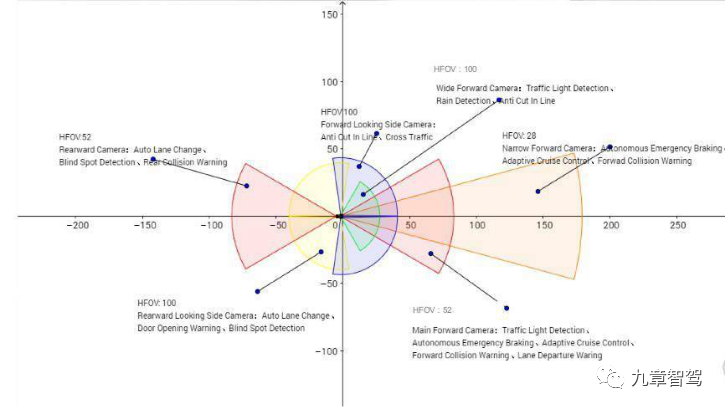
图22 P7的探测范围
(图片来源https://www.sohu.com/na/448526925_268260)
表10 三款产品的传感器具体情况
|
TESLA Model3 |
|||
|
序号 |
传感器 |
数量 |
探测距离 |
|
1 |
前视摄像头 |
3 (1个三目) |
长焦250m,中焦150m,广角60m |
|
2 |
前侧摄像头 |
2 |
80m |
|
3 |
后侧摄像头 |
2 |
100m |
|
4 |
后视摄像头 |
1 |
50m |
|
5 |
前毫米波雷达 |
1 |
170m |
|
6 |
超声波雷达 |
12 |
8m |
|
NIO ES8 |
|||
|
序号 |
传感器 |
数量 |
探测距离 |
|
1 |
前视摄像头 |
3 (1个三目) |
长焦200m,中焦150m,广角30m |
|
2 |
环视摄像头 |
4 |
10m |
|
3 |
前毫米波雷达 |
1 |
160m |
|
4 |
角毫米波雷达 |
4 |
80m |
|
5 |
超声波雷达 |
12 |
6.5 |
|
XPENG P7 |
|||
|
序号 |
传感器 |
数量 |
探测距离 |
|
1 |
前视摄像头 |
4 (1个三目 + 1个单目) |
长焦180m,中焦80m,广角30m |
|
2 |
侧视摄像头 |
4 |
40m |
|
3 |
后视摄像头 |
1 |
80m |
|
4 |
环视摄像头 |
4 |
5m |
|
5 |
前毫米波雷达 |
1 |
160m |
|
6 |
角毫米波雷达 |
4 |
80m |
|
7 |
超声波雷达 |
12 |
4m |
附2. 技术演化路线
从三家公司产品的技术演化路线来看,特斯拉起步早,2016年就已经有了NOA功能,后续从细节上优化升级;蔚来则逐步叠加功能,更像传统主机厂的风格;小鹏则是后来居上,第二代产品P7的NGP功能,就已经达到了领先水平。

图23 特斯拉的技术演化路线

图24 蔚来的技术演化路线

图25 小鹏的技术演化路线
 最前沿的电子设计资讯
最前沿的电子设计资讯

