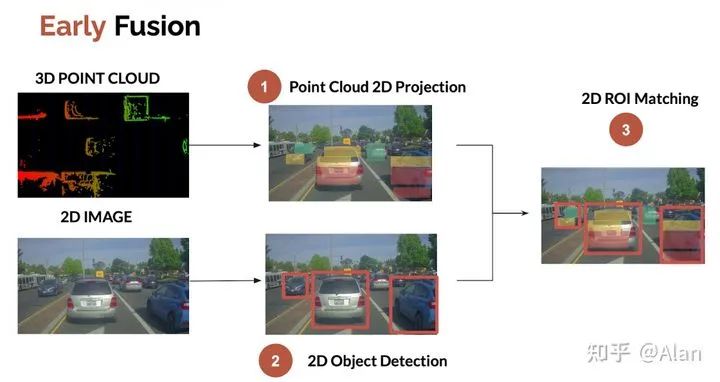
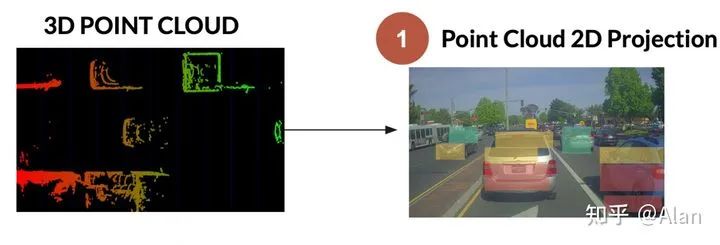
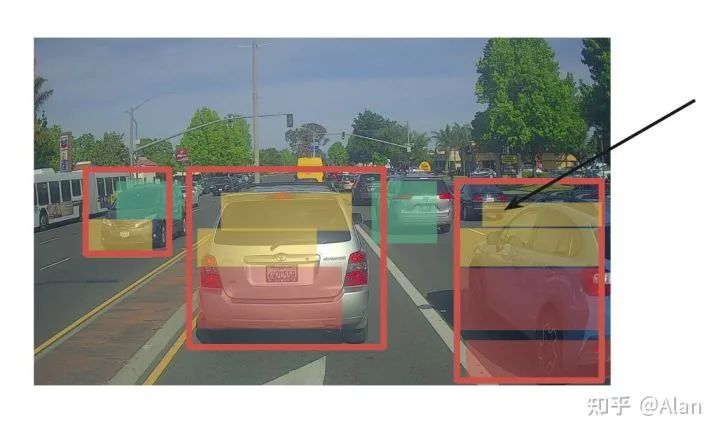
在本文中,我们将研究这两种方法。We then check whether or not the point clouds belong to 2D bounding boxes detected with the camera.This 3-step process looks like this:我们从早期融合开始。
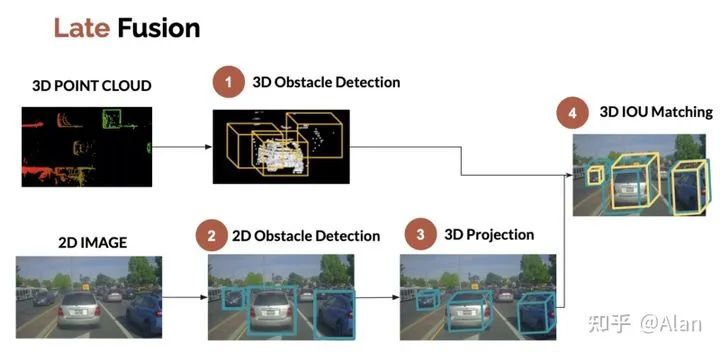
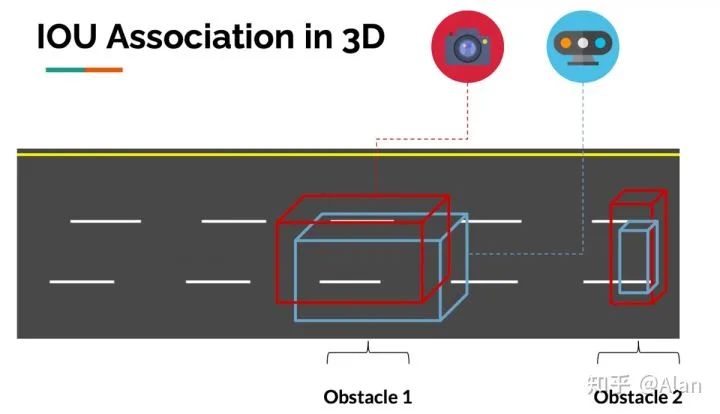
这个过程要困难得多,尤其是在使用单目相机时。在3D中寻找障碍物需要我们准确地知道我们的投影值(内在和外在校准)并使用深度学习。如果我们想获得正确的边界框,了解车辆的大小和方向也至关重要。本文是关于融合的文章,不介绍检测部分。可以查看文章。最后,关注一下匹配。Here's an example coming from the paper 3D Iou-Net (2020) .
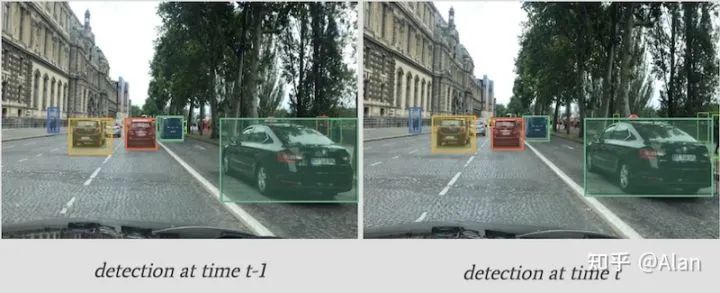
在障碍物追踪 课程中,讲了一种使用卡尔曼滤波器和匈牙利算法从帧到帧在时间上关联对象的技术。结果使我们能够在帧之间跟踪对象,甚至预测它们的下一个位置。如下所示:IOU匹配的原理完全一样:如果从第一帧到第二帧的边界框重叠,我们认为这个障碍物是相同的。此处,我们跟踪边界框位置并使用IOU(Intersection Over Union)作为指标。我们还可以使用深度卷积特征来确保边界框中的对象是相同的--我们将此过程称为SORT(简单在线实时跟踪),如果使用卷积特征,则称为深度SORT。由于我们可以在空间和时间中跟踪对象,因此我们还可以在这种方法中使用完全相同的算法进行高级传感器融合。




 最前沿的电子设计资讯
最前沿的电子设计资讯

