
小编每天坚持跑步5 km
跑步机的设置速度也逐渐从9 km/h慢慢提升
然而跑到10.5 km/h这个速度时
小编忽然好奇
使用手机进行记录和跑步机的记录差异会有多大?
结果是不试不知道
一试吓一跳

跑步机速度10.5 km/h累计跑步5 km
共计用时28'34''
换算为每公里配速的话就是…
从km/h到min/km
真·小学数学

怎么样,算出来了没有?
跑步机的数据是每公里配速5.71428…min
约为每公里用时5'43''
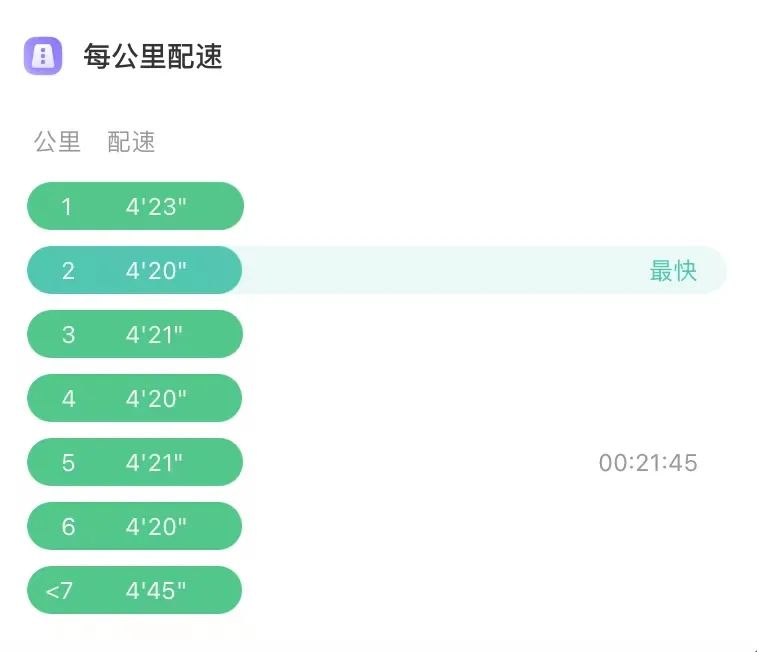
而手机记录的结果是…
共计用时28'47'' 跑步距离6.55 km
(结束记录时间稍有延迟)
这配速,这距离
小编看了都吃鲸
那么问题来了——
我到底跑了多少???
这样的记录差异是从何而来呢?
跑步机作为常见室内健身器材,我们都会自然而然的认为它的作用是帮助大家强身健体,为室内运动提供便利。

图片来源 | pixabay
然而万万没想到,跑步机竟然还有一段从刑具逆袭成为健身器材的励志故事…
跑步机对应的英文单词是Treadmill,最早的用途更接近于“踏车”,即人力驱动的动力机械。
在19世纪,“踏车”被改造成为了“跑步机”,成为了惩罚犯人的刑具。犯人们需要用力踩动辐条以带动巨大的桨轮,用于抽水、粉碎谷物或者驱动磨坊。

图片来源 [1]
囚犯们经常每天被迫踩磨坊6个小时以上,这相当于每天攀登1500米到4300米的高山。
经过了一系列的发展,跑步机也由人力驱动演变成为了电力驱动,逐渐成为了受到大家欢迎的室内健身器械。
从上面这段故事中,我们可以得知——从机械结构上进行分类,跑步机主要分为机械式跑步机和电动跑步机。
机械式跑步机主要通过运动者与跑带的摩擦,带动跑带跟随着运动者的脚步进行运动,也就是“人力驱动”。
想体验机械式跑步机也很简单,当跑步机处于关闭状态,我们在跑步机上用力带动跑带的过程,就类似于机械式跑步机的工作原理。(但谁又会想这样做呢?)

而现在,电动跑步机成为主流,其运作方式是通过电机带动跑带的转动,从而带动运动者跟随其转动速度进行运动。跑步机上的运动者也从“主动”变为了“被动”。
除了不受天气影响之外,跑步机的输送带具有避震功能,可以一定程度上降低跑步对膝盖和背部的伤害。
那么跑步机是如何记录跑步距离和速度的呢?
目前,电动跑步机的加减速都是通过手动按钮控制,我们可以自主地设定心仪的速度来进行跑步锻炼。
也就是说,通过使用者设定速度,跑步机的控制系统和电机通过协同工作保证了跑带以固定的速度(即设定速度)转动。
在这种工作模式之下,只需要将跑步者的跑步速度与时间进行记录,求和即可得到跑步距离:
以小编的跑步情况为例,跑步速度为10.5 km/h,跑步时间为28:34,就可以得出跑步距离为5 km。
但这样的控制方式,制约了健身者改变速度的自由性,对于电动跑步机应用拓展也产生了诸多不利影响。
因此,有越来越多新的跑步机速度跟踪控制方法被提出,希望可以让大家运动的更加科学和舒适。
为了让跑步机速度控制更加便捷,最简单的思路就是建立一套速度自动跟踪控制的方法。
简单来说,就是在跑步机控制系统中引入反馈回路,这样控制系统就可以根据跑步者实际的跑步情况来自动进行调节。

图片来源 | pixabay
那么,哪一个信息适合被加入反馈回路呢?心率和跑步者的位置似乎是不错的选择。
让我们先来了解一些传感器相关的知识。
传感器技术是指可以感知周围环境以及特殊物质,将采集的环境或物质信息进行分析,并且将识别物质的模拟信号转化为数字信号。
因此,传感器可以决定所获取的数据信息的数量与品质。
上面提到的跑步机速度自动跟踪方法,是指将心率传感技术和位置传感技术进行集成,能够实时追踪到运动者的心率状态和位置状态。
其自动控制流程原理如下图所示:

基于传感技术的跑步机速度自动跟踪控制方法流程图 [3]
为了保证运动者的安全,光学心率传感器会时刻提供运动者的心率信息。
当运动者的心率超过设定阈值时,跑步机会自动降低速度,使运动者的心率逐渐恢复到正常数值。

图片来源 | pixabay
若运动者的心率没有得到缓解,跑步机则会自动急停,最大限度地保护运动者的生命安全。
另一方面,当运动者处于跑步带的中央时,从平衡感的角度考虑,是处于最佳运动状态的。
因此,位置传感器可以时刻确定运动者在跑步带上的位置,如果运动者偏离跑步机的中心位置,反馈回路同样会进行调节。通过微调跑带速度使运动者回到中心位置。
但这样的调节方式也存在一些不足之处,例如:相同的位置偏差可能是由远及近引起,也可能是由近及远引起,在进行速度补偿时容易发生误判,反而使运动者更偏离中心位置。
除此之外,在跑步机正常运行过程中,人在跑带上跑步,可以近似被看做脉冲型负载。
脉冲型负载具有明显的周期性,加载与卸载的作用时间较短,马达可能会在脚触板的任意时刻变速,会造成加减速震荡,带来不良体验。

图片来源 | pixabay
除了考虑心率和跑步者的位置,步法也可以作为反馈回路的重要信息。
步法信息是指运动时脚底与跑步机之间的作用力信号,可以通过在电动跑步机跑带下方安装压力传感器获得。
通过分析运动时的步法信息,可以判别运动者的运动趋势。将压力传感器采集到的人在运动时产生的Z方向垂直力求和:
运动者在任意时间t的位置信息可以由力矩平衡方程得到:
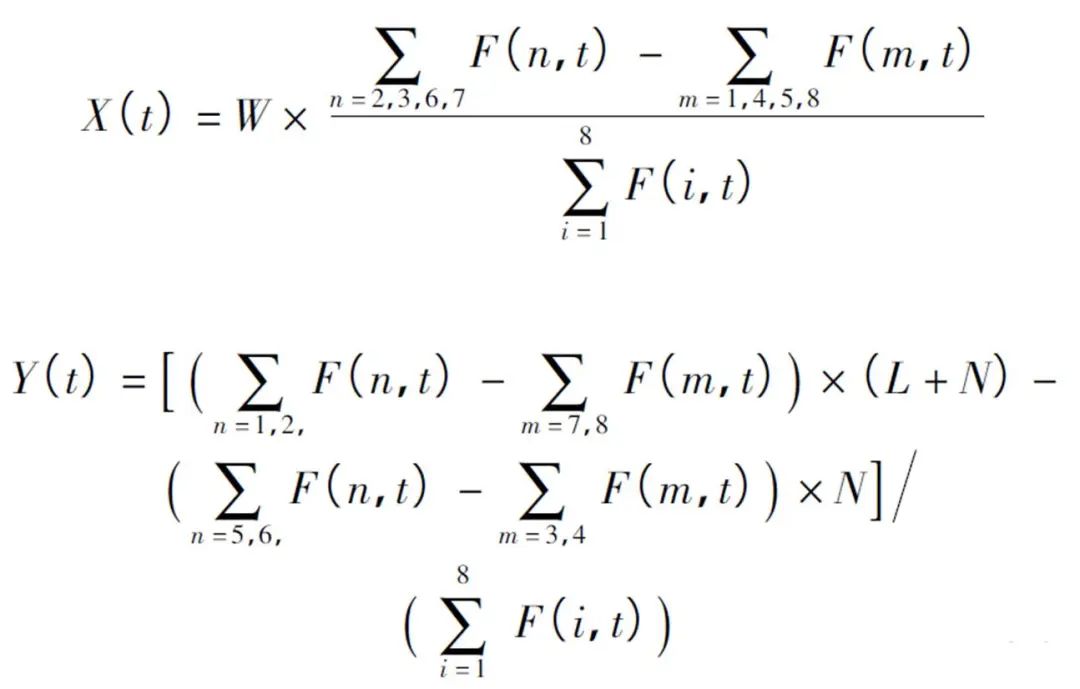
由此可以获得F(t) 、X(t) 、Y(t) 的实时曲线,经过分析可以划分出跑步者步态周期中的各个阶段。
将步法信息(F(t) 、X(t) 、Y(t)等)作为反馈回路的重要判别因素,进而控制电机加速或减速,使得跑步机速度随着人体运动速度的变化而改变,可以在一定范围内实现跑步机速度的跟随控制,提升跑步机的性能。
前面为大家详细的介绍了跑步机计步和性能优化的相关知识,让我们再接着了解手机记录跑步距离和速度的原理,看看为什么两种记录方式的差异会如此之大呢?
首先,我们先从简单的计步器开始,计步器可以记录运动者的行走步数、行走距离、行走速度和行走时间等数据,并且在此基础上测算运动者某一时段的卡路里或热能消耗,主要用于统计运动量。

电子计步器 | 图片来源
目前,常见的计步器分为机械式计步器、基于专用计步芯片的电子计步器、智能手环和基于智能手机内置传感器开发的计步器软件等。

图片来源 | pixabay
以电子计步器为例,为了实现计步的功能,需要对行走和跑步时具有周期性的物理量进行精确的记录。
而人在行走或跑步时,加速度的变化最为明显,可以将其分解为前向、纵向、侧向三个方向的变量。
行走和跑步的过程中,加速度随着我们的步伐呈现周期性变化。
将我们行走的动作进行分割,其中,在收脚的动作中,由于重心向上,单只脚触地,垂直方向加速度是呈现正向增加的趋势;向前迈步时,重心下移两脚触地,加速度呈现反向减小的趋势;而水平加速度在收脚时减小,在迈步时增大。

图片来源 | pixabay
因此,无论将计步器放在哪个部位,至少会有一个方向的加速度幅度会具有明显的周期性变化,从而实现精确计步的目的。
在智能手机中,各种各样的传感器协同工作支持着我们的各种需求——光线传感器、距离传感器、重力加速度传感器、磁力传感器、心率传感器、振动传感器…
类似于电子计步器,智能手机也可以采集人体在运动时的加速度信号,从下图中可以看到行走过程中加速度的循环特性。
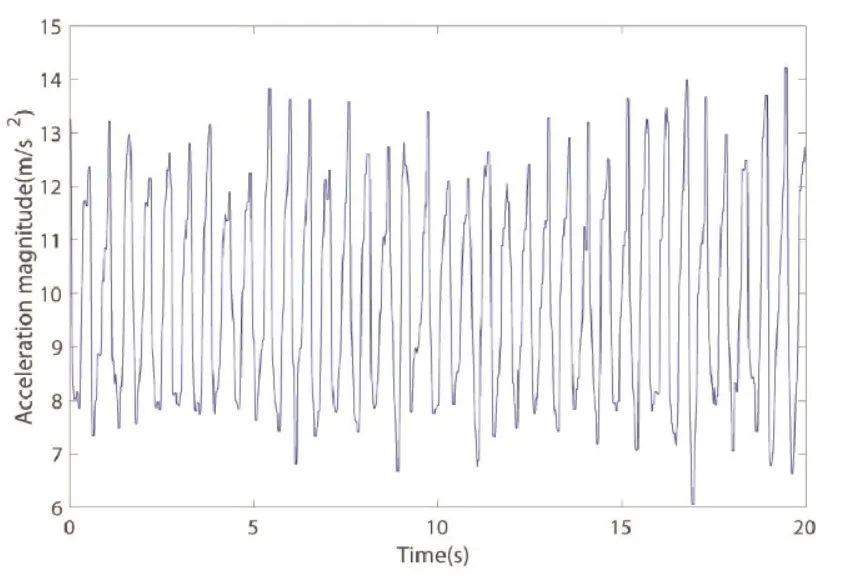
连续行走时产生的加速度的大小 | 图片来源 [6]
自相关系数计步算法基于加速度的循环特征,通过计算两个相邻步行周期上整体加速度的相关性强弱判断行人是否行走,相关性越高,则准确计步的概率越大。
另外一种智能手机计步方法是频域计步算法,即通过收集离散时间序列上的传感器数据,将这些数据进行短时傅里叶变换(Short Term Fourier Transform,STFT)或者快速傅里叶变换(Fast Fourier Transform,FFT)。
传感器收集到的数据转换到频域后,可以放大一些在时域上不够明显的信号特征。
我们非常熟悉的陀螺仪在智能手机的计步功能中也发挥了重要的作用。陀螺仪的主要功能是检测角动量。
以FFT计步算法为例,将陀螺仪采集到角速度最大的坐标轴作为敏感轴,接着对角速度数据作FFT处理,将时域角速度数据转换为频域数据。
最后,判断数据是否在典型步行频率范围内且超出预设的振幅阈值,若符合上述条件,则计一步。
相较于时域的计步方式,频域计步方式会更加准确,但同时也带来了更大的能耗。
如下表格对目前各种计步算法进行了简单的总结:
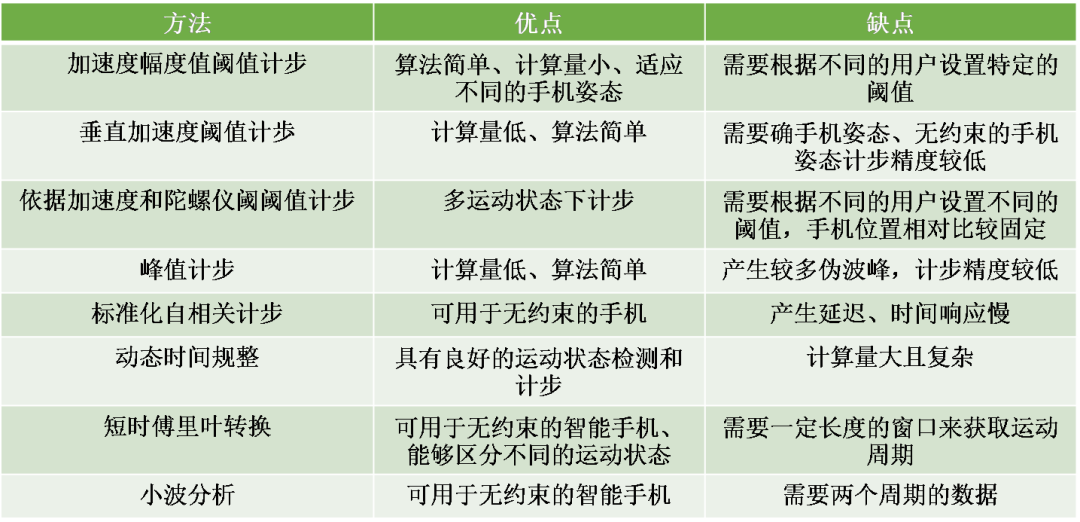
各种计步算法的优缺点对比 [7]
通过对跑步机和智能手机计步方式的了解,我们可以知道跑步机是通过运动者设定的速度和运动时间进行距离记录。
而智能手机的计步方式相对更为多样,但其共性是通过对传感器得到的数据进行不同的算法分析从而进行计步。
这样看来,我们在跑步机上的跑步姿势、步长和步频都会导致智能手机测量结果的精准程度不同,也就造成了小编在跑步机记录跑步距离5 km,而智能手机记录结果却是6.55 km的巨大差异。
所以仔细想想…难道是小编短腿导致了步频偏高,所以手机记录结果虚高???

大家也一起来看看不同记录方式的差异有多大吧!
 最前沿的电子设计资讯
最前沿的电子设计资讯

