差不多去年这个时候,特斯拉逐步停止使用雷达这事儿闹得沸沸扬扬。当时Tesla明确表示,从2021年5月开始,分阶段采用Tesla Full Vision方案,传感器套件不再包含毫米波雷达,也就是说,完全依靠摄像头和神经网络处理来提供Autopilot、FSD和一些主动安全功能。
我呢那时候也蹭了波热度,顺势写了篇 特斯拉为何抛弃雷达,当时表达的核心观点摘录如下,
......,我觉得特斯拉是会考虑用雷达的,当然,是高分辨4D成像雷达,成像雷达会在那些视觉AI无能为力的场景下,暂时性,局部性成为主导传感器,基于雷达数据集训练完成的AI,基于实时Radar Detection Image(RDI), 通常是精细化的range-doppler map,或者range-angle map等输入,完成场景理解(scene understanding),进而做出合适反馈。......,所以与其说特斯拉抛弃毫米波雷达,不如说成特斯拉抛弃传统毫米波雷达,且暂时不采用高分辨成像雷达。......
叶融茶归,公众号:凡知杂货铺行业 I 特斯拉为何抛弃雷达
看来“暂时”时间到了。
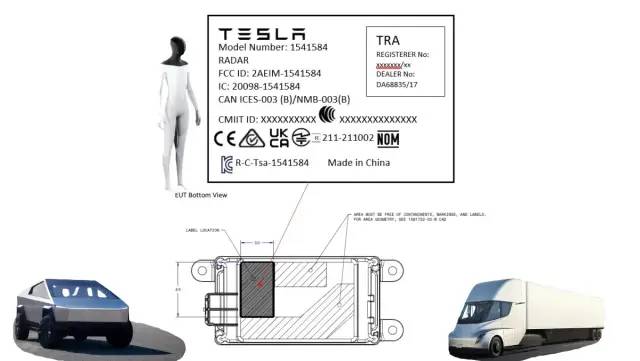
就在6月7日,特斯拉向美国联邦通信委员会(FCC)注册了一种新型高分辨率雷达(High Resolution Radar, HD Radar),也就是我们常说的毫米波成像雷达,这一消息由几个关注特斯拉发展的Twitter账户报道,并且给出有关该雷达基本测试信息的FCC链接。
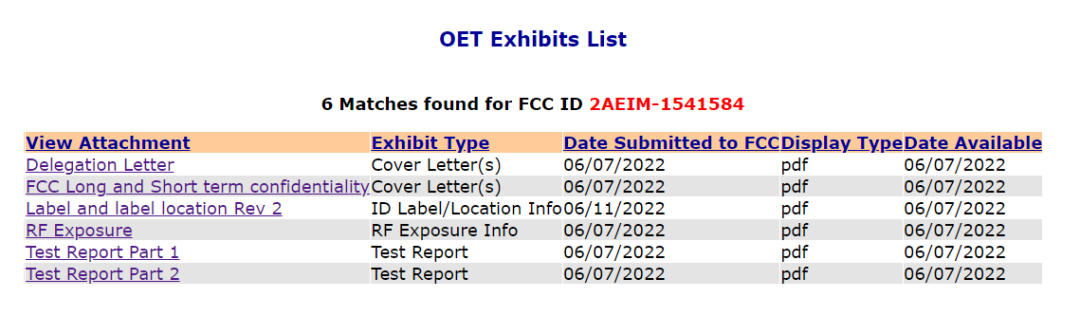
▲ Tesla radar (source FCC,https://apps.fcc.gov/oetcf/eas/reports/ViewExhibitReport.cfm?mode=Exhibits&RequestTimeout=500&calledFromFrame=Y&application_id=TAi5l5atHcj4G%2FIFPFuKbA%3D%3D&fcc_id=2AEIM-1541584)
▲ Continental ARS540 4片级联方案
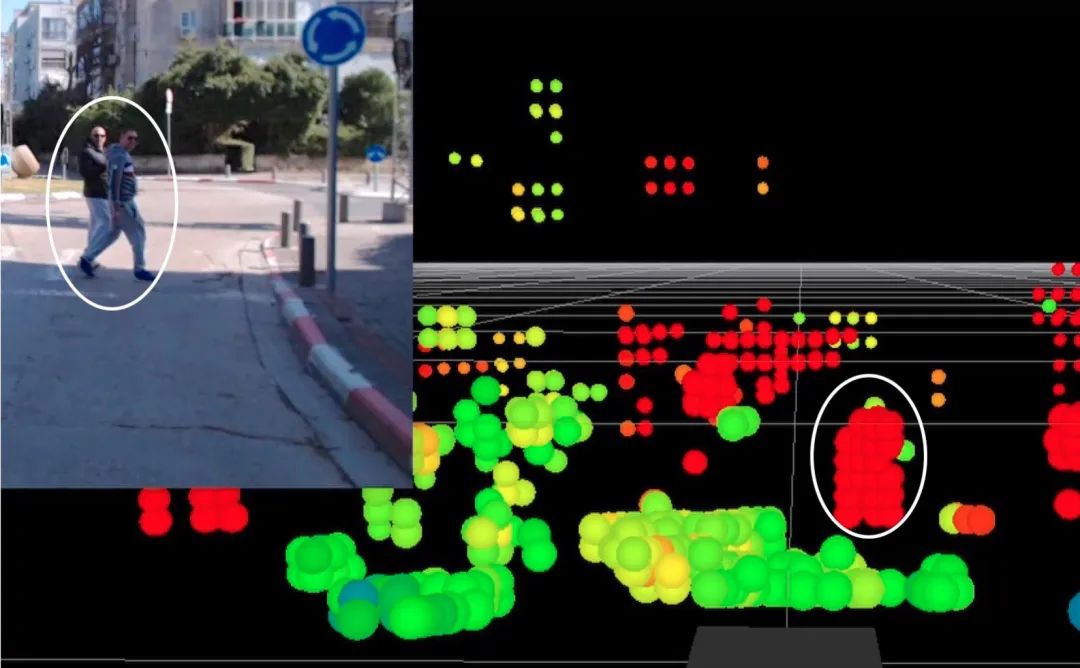
▲ Arbe Radar Test
我看到国外有些讨论,将Telsa毫米波成像雷达用于自家Optimus Robot,蛮有意思,摘录如下,
此外,还有擎天柱,虽然会比人小一点,但在移动时需要格外小心,因为它会靠近人。人是一种相对脆弱的生物,所以如果机器人出现在我们的日常生活中,它们将不得不巧妙地在我们之间移动,以免意外造成伤害。在这种情况下,Tesla Bot 将需要一整套硬件来收集最准确的数据。特斯拉在擎天柱身上安装多个摄像头是没有意义的,所以当摄像头在前面时,雷达可以在后面。 https://www.tesmanian.com/blogs/tesmanian-blog/tesla-registers-new-high-resolution-radar-unit-with-fcc-possible-for-semi-and-cybertruck
▲ Tesla Radar Applications
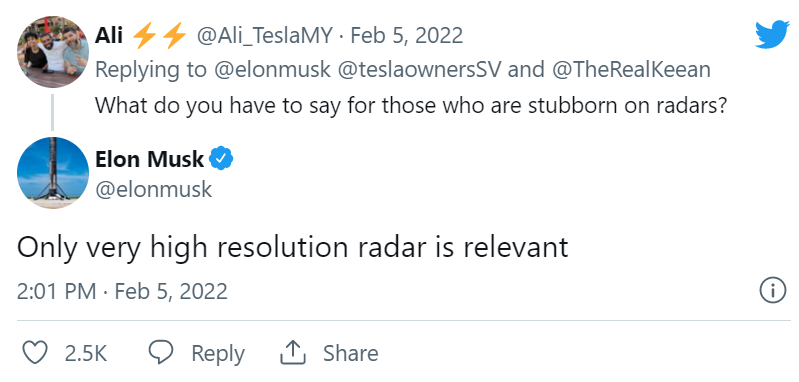
其实,早在今年年初,Elon在twitter就暗示HD Radar将会是一个合适的选择,它将比较好得解决Elon之前所说的低分辨雷达受噪声污染的信息流无法利用的问题。
事实上,早在2017年,ti就发布4芯片级联此项雷达方案,极大得降低了成像雷达开发门槛。即便如此,车载雷达巨头Continental 2021才量产成像雷达(2016年启动),而众多国内厂商步伐挺快,但基本停留在点云(或跟踪分类)层面,成像雷达究竟该如何服务于自动驾驶,与其他传感器如何有效融合,依靠算法优势6Tx8Rx性能是否已经足够等等问题,对于我们而言依旧是一个需要不断探索实践的过程。
这篇算是行业 | 特斯拉为何抛弃雷达的姊妹篇,大家可以对比阅读,有关Tesla雷达这事就会比较明朗了。
下期见
。
-END-
作者:叶融茶归
图源:公开材料
 最前沿的电子设计资讯
最前沿的电子设计资讯