
 严格意义上 AI Day 不像是“发布会”,而是“交流会”——马斯克本人也在推特上说,“此活动旨在招聘 AI 和机器人工程师,因此技术含量很高”——换句话说,这是马斯克的高山流水,为特斯拉的钟子期而开。
严格意义上 AI Day 不像是“发布会”,而是“交流会”——马斯克本人也在推特上说,“此活动旨在招聘 AI 和机器人工程师,因此技术含量很高”——换句话说,这是马斯克的高山流水,为特斯拉的钟子期而开。
不过这并不妨碍我们以比较轻松的视角,记录下这场科技狂欢。因为特斯拉团队几乎 100% 实现了去年的承诺,在本届 AI Day 上带来了以下技术成果:
不再需要群演的真·Tesla Bot 机器人原型机;
不再停留在 PPT 的 DOJO POD 人工智能超级计算机;
FSD 技术新进展,等等。
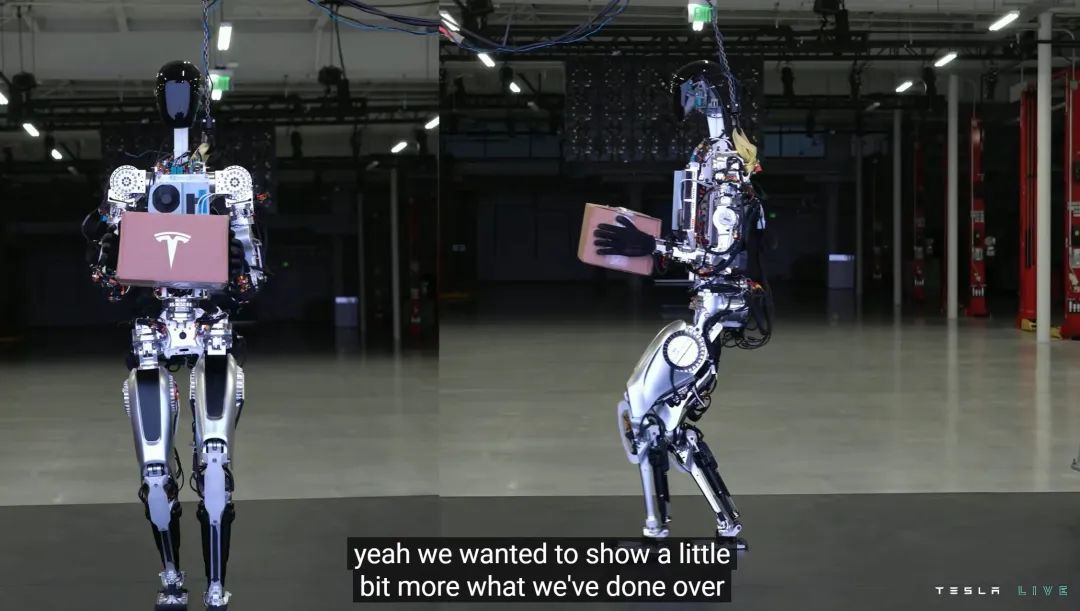
 13 个月前还需要群演的 Tesla Bot,今天正式以原型机的形式出现——原型意思是它还没穿衣服(外壳)。
13 个月前还需要群演的 Tesla Bot,今天正式以原型机的形式出现——原型意思是它还没穿衣服(外壳)。 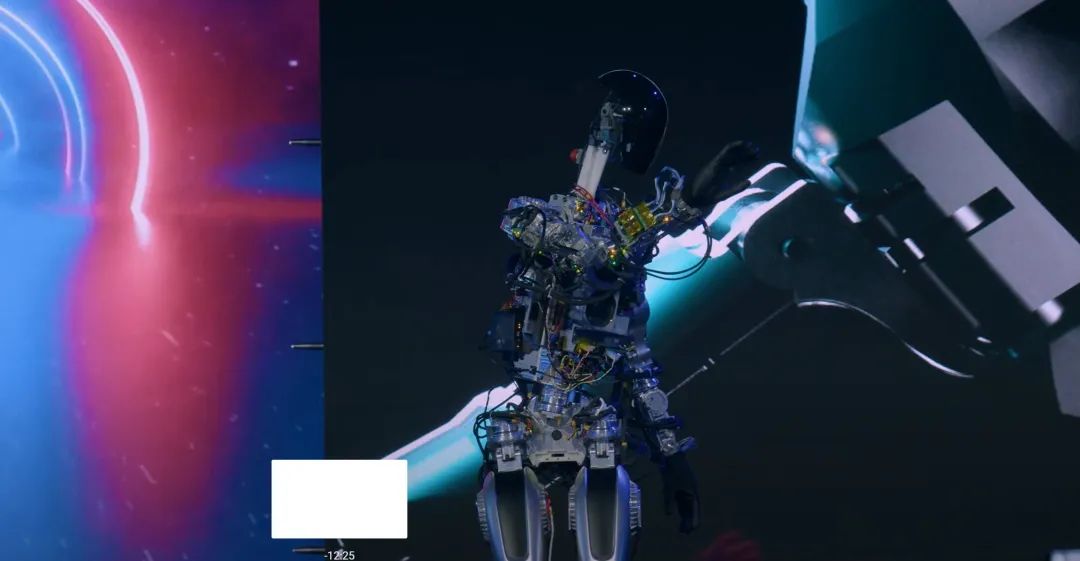 原型机的样子比 PPT 里面明显更粗放,线束、促动器等零件堆砌略显凌乱。但好消息是,Tesla Bot 原型机已经可以走路、打招呼,双手可以完整举过头顶。
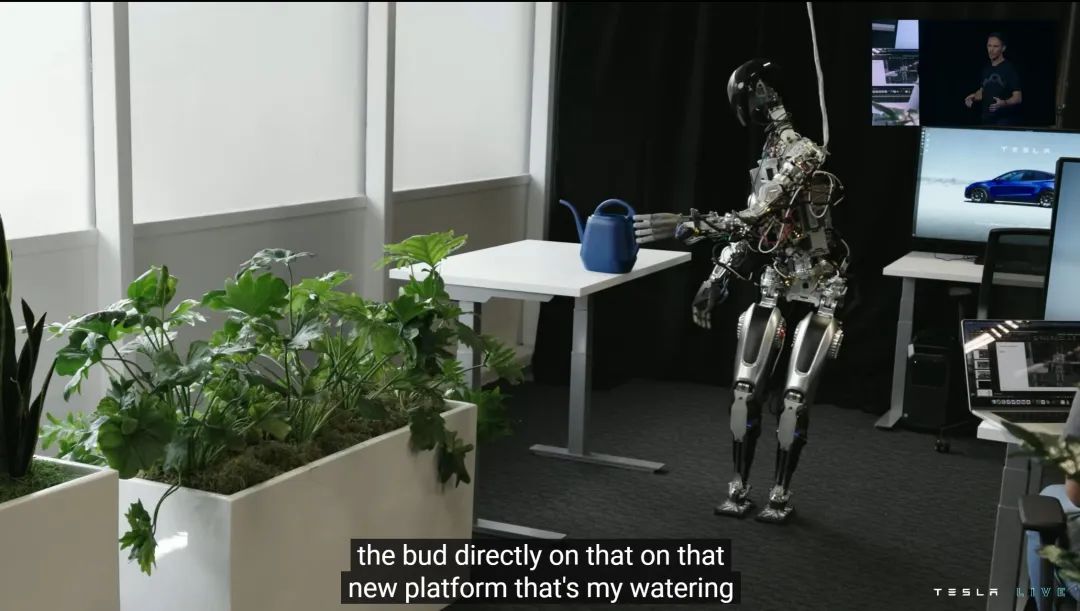
原型机的样子比 PPT 里面明显更粗放,线束、促动器等零件堆砌略显凌乱。但好消息是,Tesla Bot 原型机已经可以走路、打招呼,双手可以完整举过头顶。 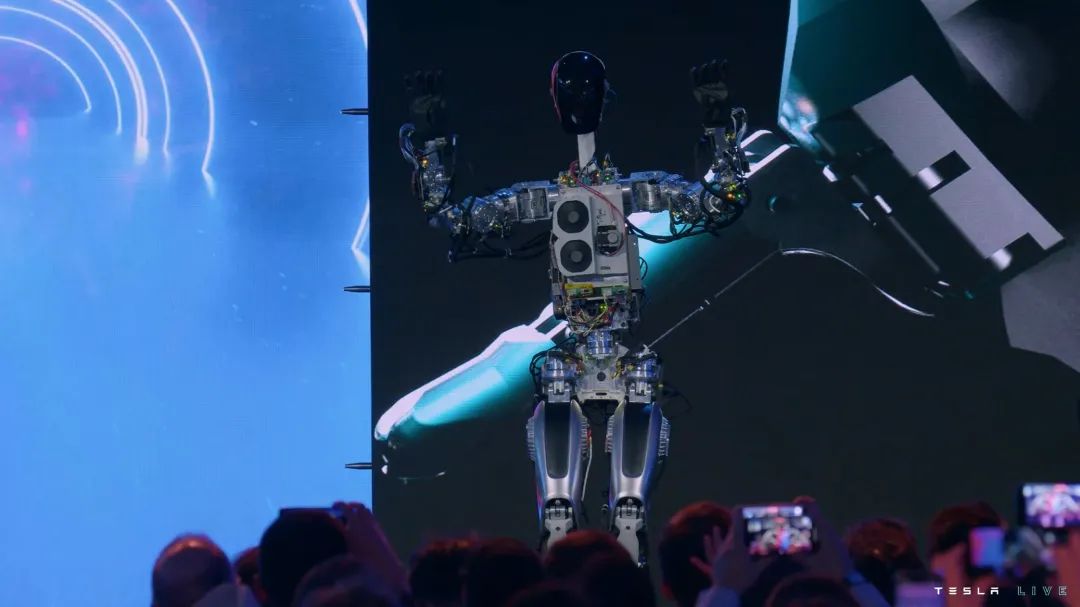 在特斯拉的演示视频里,Optimus 已经可以做一些简单的工作,比如搬运箱子、浇花等等。
在特斯拉的演示视频里,Optimus 已经可以做一些简单的工作,比如搬运箱子、浇花等等。 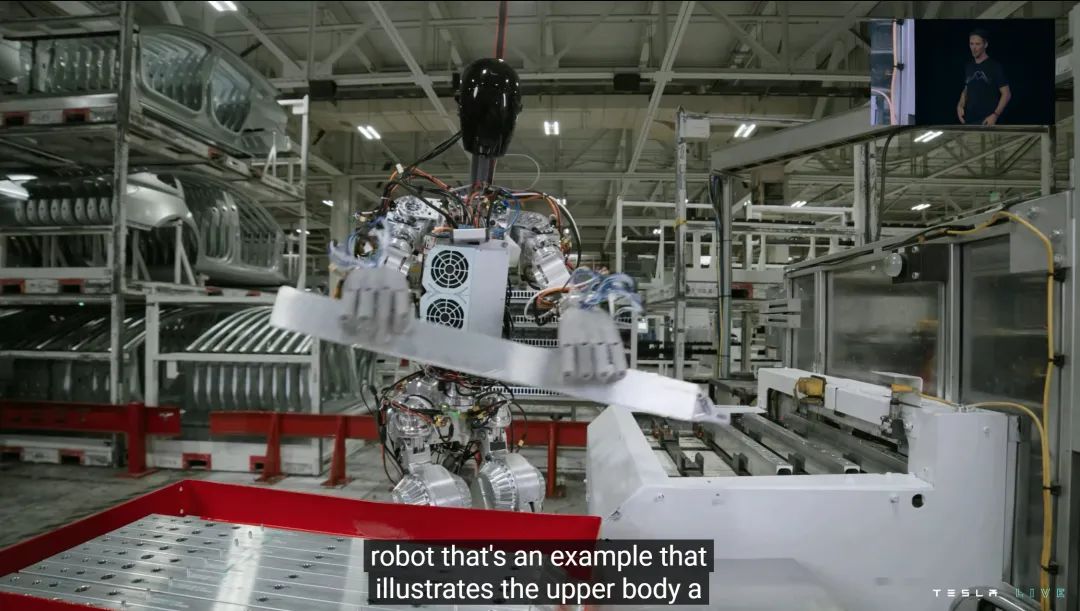
 但更重要的可能是这个画面:Optimus 眼中的世界,通过纯视觉发现并分析周边的一切,然后识别出自己的任务对象。
但更重要的可能是这个画面:Optimus 眼中的世界,通过纯视觉发现并分析周边的一切,然后识别出自己的任务对象。 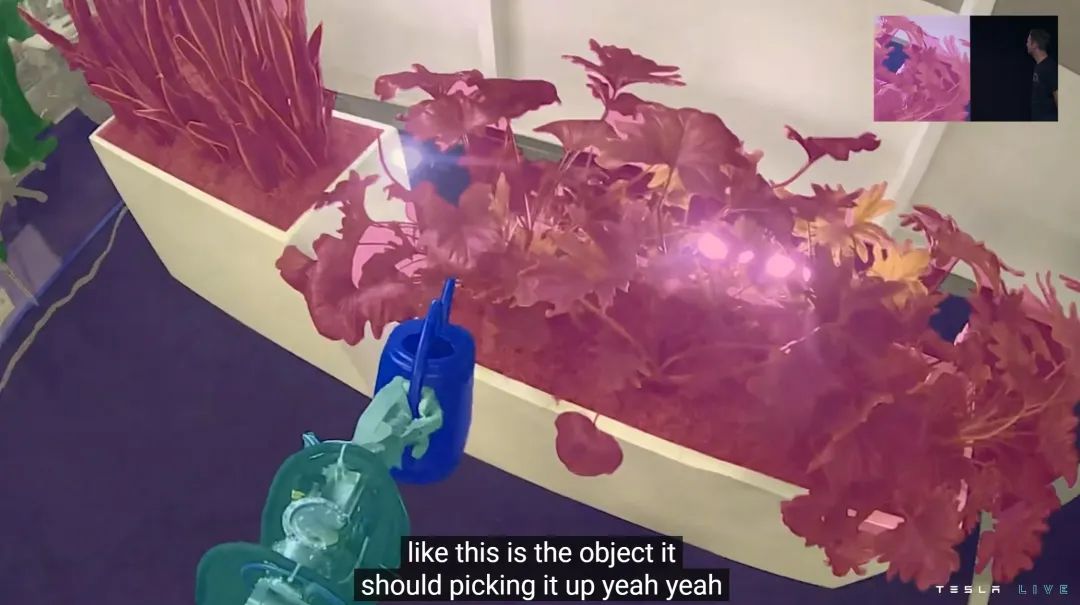 事实上 Optimus 不是不能装上外壳,但出于工程原因,带外壳版本截止到发布会当天还不能自如地走路(原因后面再解释),只能简单挥舞一下手臂。
事实上 Optimus 不是不能装上外壳,但出于工程原因,带外壳版本截止到发布会当天还不能自如地走路(原因后面再解释),只能简单挥舞一下手臂。  装上外壳之后我们发现,更接近量产版的 Optimus,变得更胖了——现在它重 73 公斤,比去年 PPT 版增重超过 20%,整个“人”圆了一大圈。
装上外壳之后我们发现,更接近量产版的 Optimus,变得更胖了——现在它重 73 公斤,比去年 PPT 版增重超过 20%,整个“人”圆了一大圈。 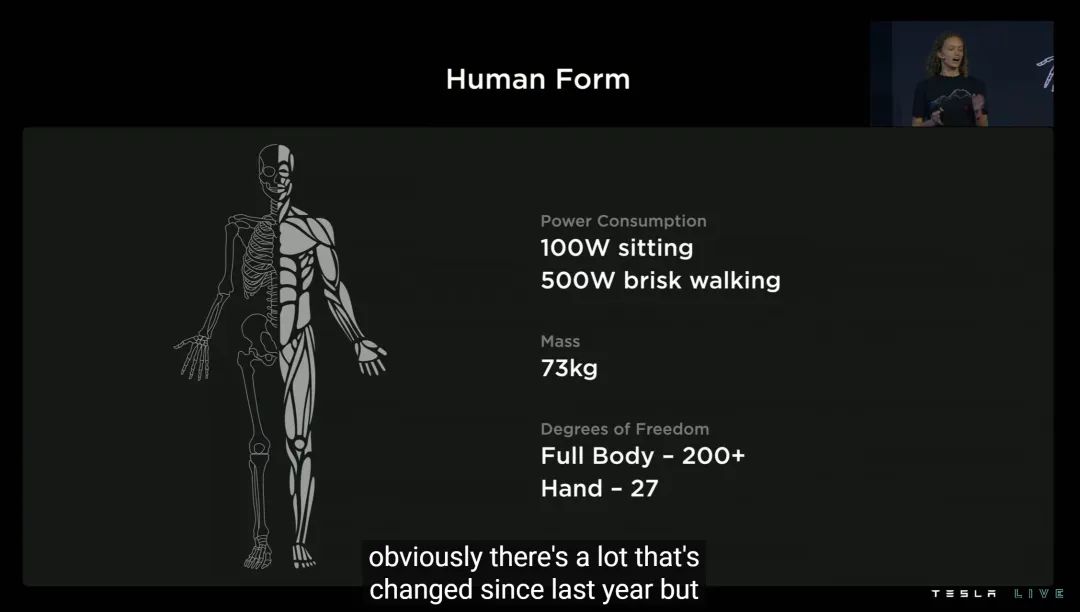 更接近量产,也意味着 Optimus 更高阶的参数也可以公布了:100W 静坐功耗、500W 快步走功耗、超过 200 档的关节自由度,光手部自由度就有 27 档。
更接近量产,也意味着 Optimus 更高阶的参数也可以公布了:100W 静坐功耗、500W 快步走功耗、超过 200 档的关节自由度,光手部自由度就有 27 档。 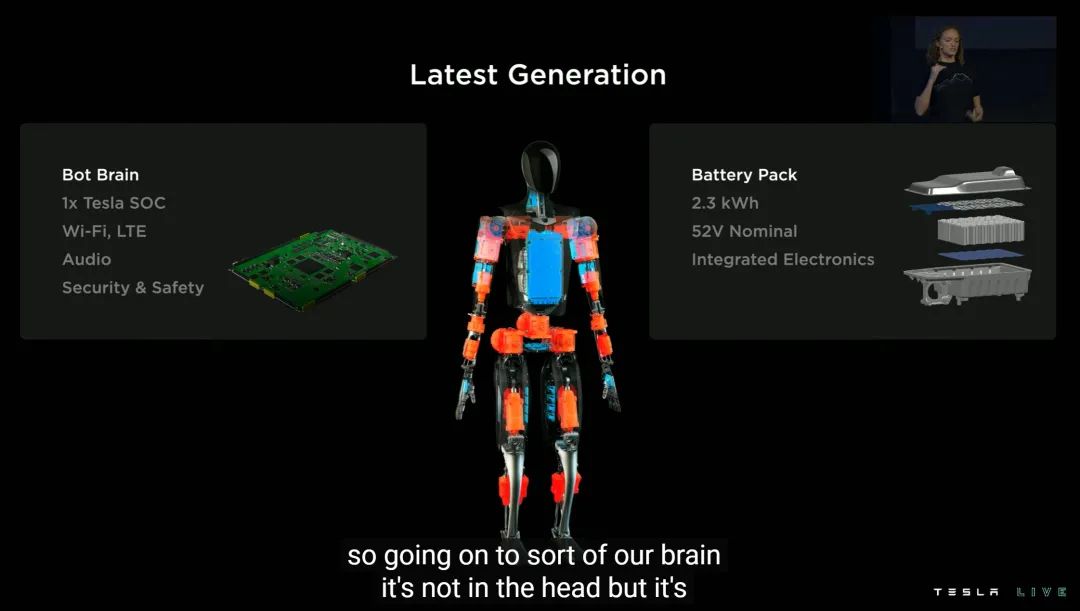 另外,Optimus 的大脑由单块 FSD Chip 组成,意味着算力应该是 HW3.0 的一半(72TOPS);电池则是 52V 电压、2.3kWh 容量、内置电子电气元件的一体单元。 说完数字,是时候聊聊 Optimus 的研发逻辑了。
另外,Optimus 的大脑由单块 FSD Chip 组成,意味着算力应该是 HW3.0 的一半(72TOPS);电池则是 52V 电压、2.3kWh 容量、内置电子电气元件的一体单元。 说完数字,是时候聊聊 Optimus 的研发逻辑了。
1. 汽车化
马斯克说过“当你能解决自动驾驶,你就能解决现实世界中的人工智能”。这句话点破了特斯拉研发 Optimus 的方法论:大量借鉴汽车研发经验。 比如借鉴汽车碰撞模拟软件,为 Optimus 编写“跌倒测试”软件。  再比如利用汽车大规模零件的生产经验,为 Optimus 挑选尽可能保证成本+效率的原材料。“我们不会用碳纤维、钛合金这样的原材料。因为它们虽然很优秀,但像肩膀这样的易损部位,制造和维修成本都太贵了”。
再比如利用汽车大规模零件的生产经验,为 Optimus 挑选尽可能保证成本+效率的原材料。“我们不会用碳纤维、钛合金这样的原材料。因为它们虽然很优秀,但像肩膀这样的易损部位,制造和维修成本都太贵了”。 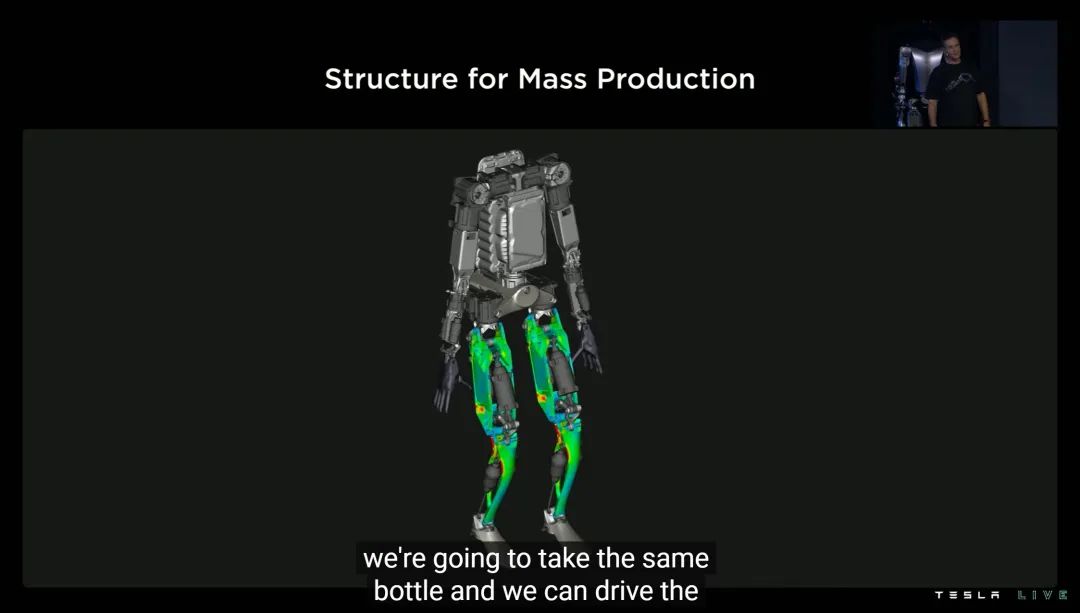
除此以外,制造 Optimus 的中心思想,也基本和智能汽车相当:减少线束长度、计算和电子控制单元中心化,等等。
2. 仿生学
既然是类人机器人 humanoid,设计自然要借鉴人类仿生学。
 特斯拉用了几个例子解释 Optimus 的仿生学,首先是膝关节。特斯拉表示 Optimus 的关节希望尽量复刻生物学上的“非线性”逻辑,也就是贴合膝关节直立到完全弯曲时的受力曲线。
特斯拉用了几个例子解释 Optimus 的仿生学,首先是膝关节。特斯拉表示 Optimus 的关节希望尽量复刻生物学上的“非线性”逻辑,也就是贴合膝关节直立到完全弯曲时的受力曲线。 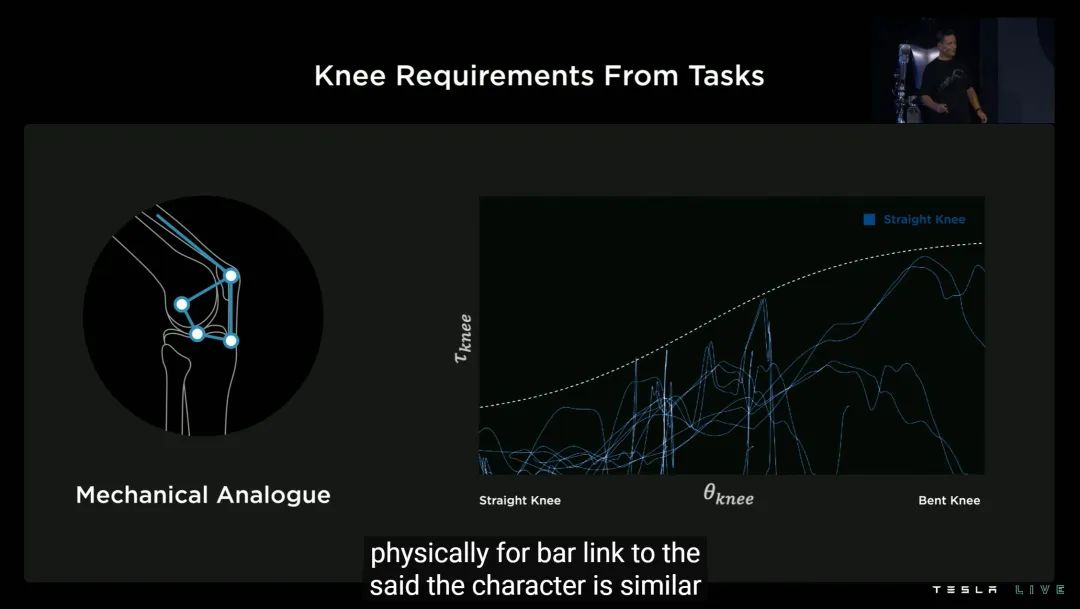 为此,Optimus 的膝关节使用了类似于平面四杆机构的设计,最终发力效果会更接近人类。
为此,Optimus 的膝关节使用了类似于平面四杆机构的设计,最终发力效果会更接近人类。  紧接着,我们创造人类文明的双手,才是 Optimus 类人之路更大的 boss。
紧接着,我们创造人类文明的双手,才是 Optimus 类人之路更大的 boss。 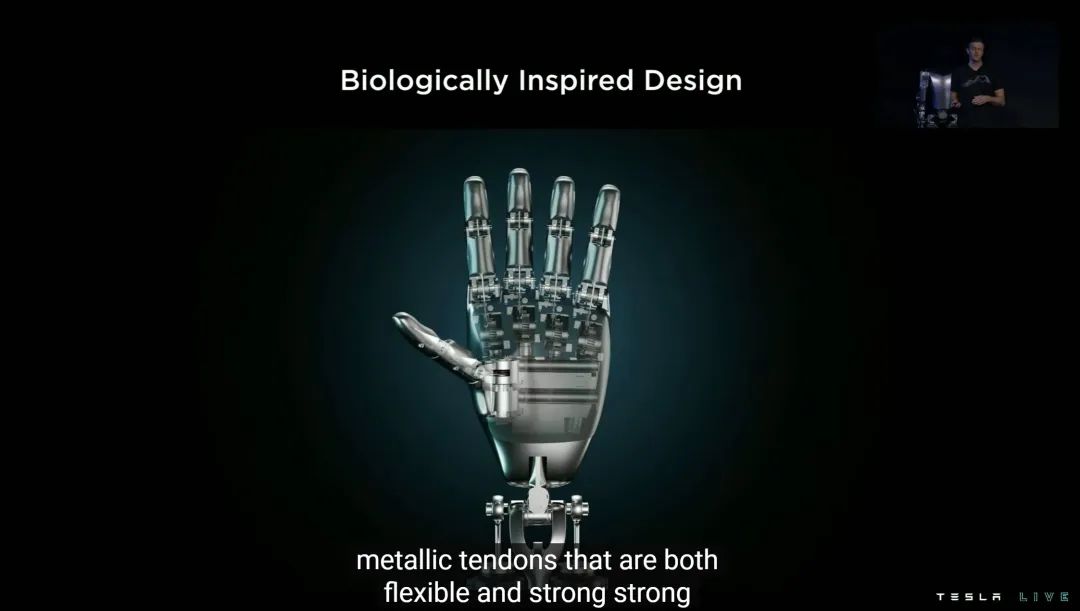 Optimus 光手掌区域就用了 6 个促动器,具有 11 档的自由度。拥有自适应的抓握角度、20 磅(9 公斤)负荷、工具使用能力、小物件精准抓握能力等等。
Optimus 光手掌区域就用了 6 个促动器,具有 11 档的自由度。拥有自适应的抓握角度、20 磅(9 公斤)负荷、工具使用能力、小物件精准抓握能力等等。 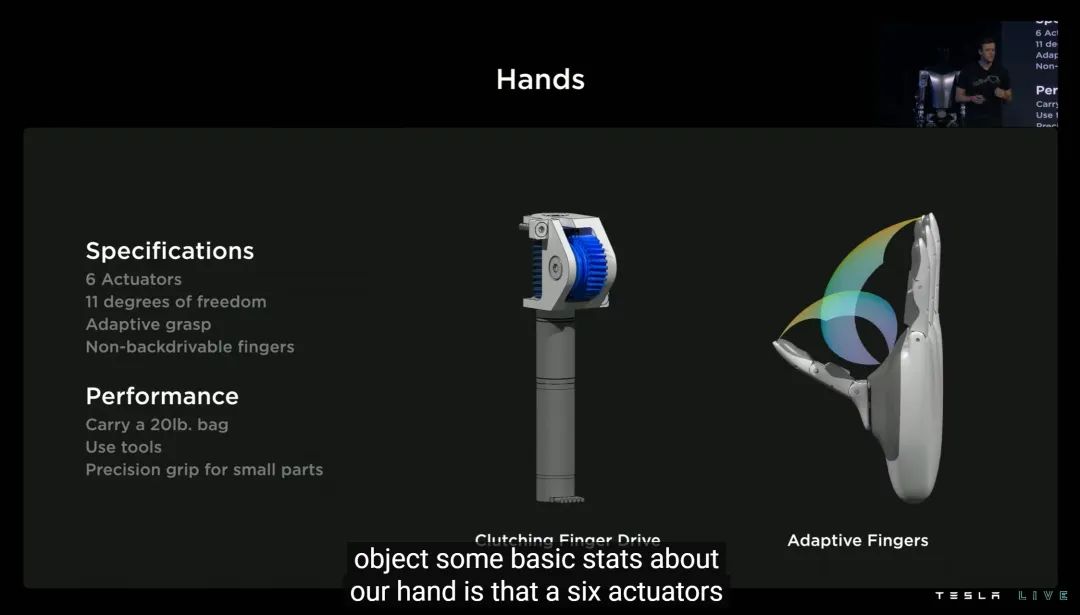 此外,Optimus 的手掌用的是“non-backdrivable”无法反向驱动的指尖促动器。学术界的看法是,这样的促动器可以提升在“开放环境”下的性能。 最后是让 Optimus 学着像人类一样走路——这里用到的仿生学设计叫做“运动重心控制”。
此外,Optimus 的手掌用的是“non-backdrivable”无法反向驱动的指尖促动器。学术界的看法是,这样的促动器可以提升在“开放环境”下的性能。 最后是让 Optimus 学着像人类一样走路——这里用到的仿生学设计叫做“运动重心控制”。 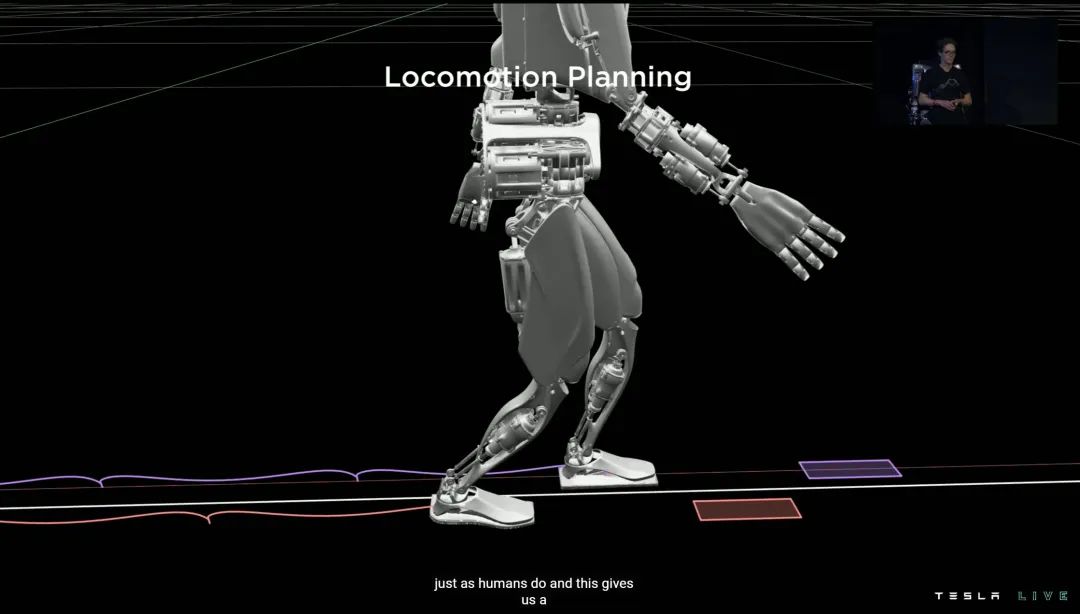 为什么有外壳的 Optimus 还不会走?其中一个原因就是重量变了,运动重心控制算法需要重新调试。
为什么有外壳的 Optimus 还不会走?其中一个原因就是重量变了,运动重心控制算法需要重新调试。 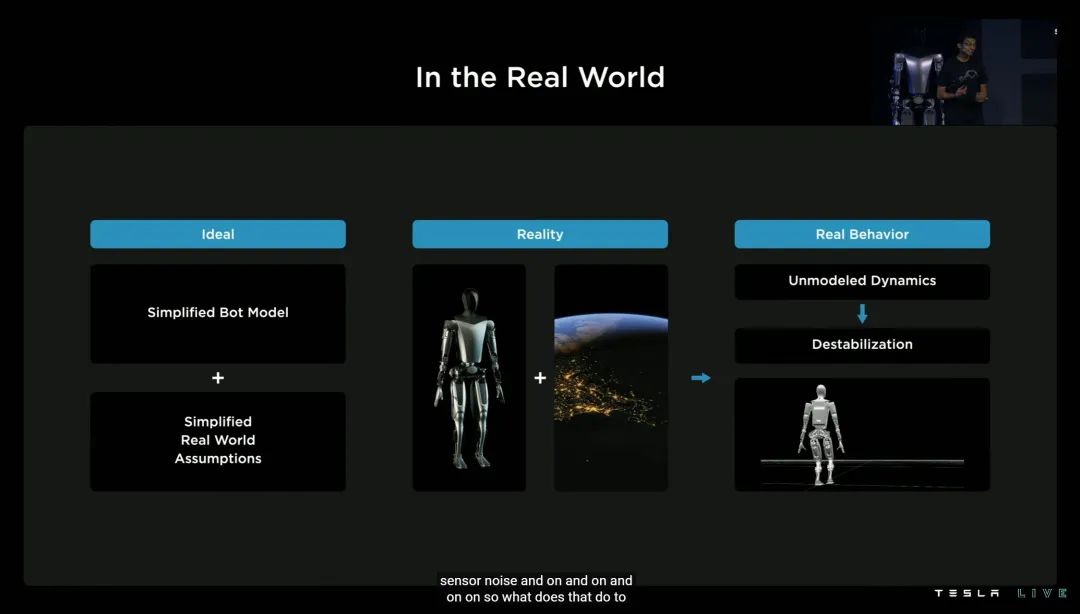 事实上,Optimus 不仅要做到会走路,还要做到别摔倒。所以它不仅需要控制走路的重心,还要稳住受到外力(比如推搡)时的随机动态重心。
事实上,Optimus 不仅要做到会走路,还要做到别摔倒。所以它不仅需要控制走路的重心,还要稳住受到外力(比如推搡)时的随机动态重心。 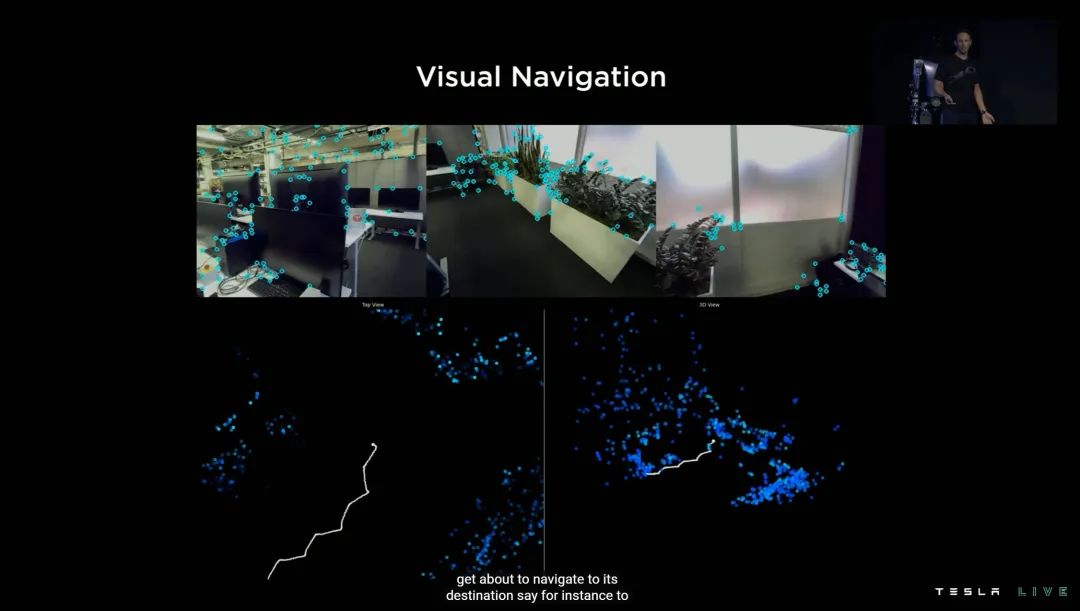 训练 FSD 用到的神经网络和在线仿真模拟,这次在 Optimus 身上大显身手。路径规划、视觉融合、视觉导航等等熟悉的名词都被灌输到 Optimus 脑子里。
训练 FSD 用到的神经网络和在线仿真模拟,这次在 Optimus 身上大显身手。路径规划、视觉融合、视觉导航等等熟悉的名词都被灌输到 Optimus 脑子里。 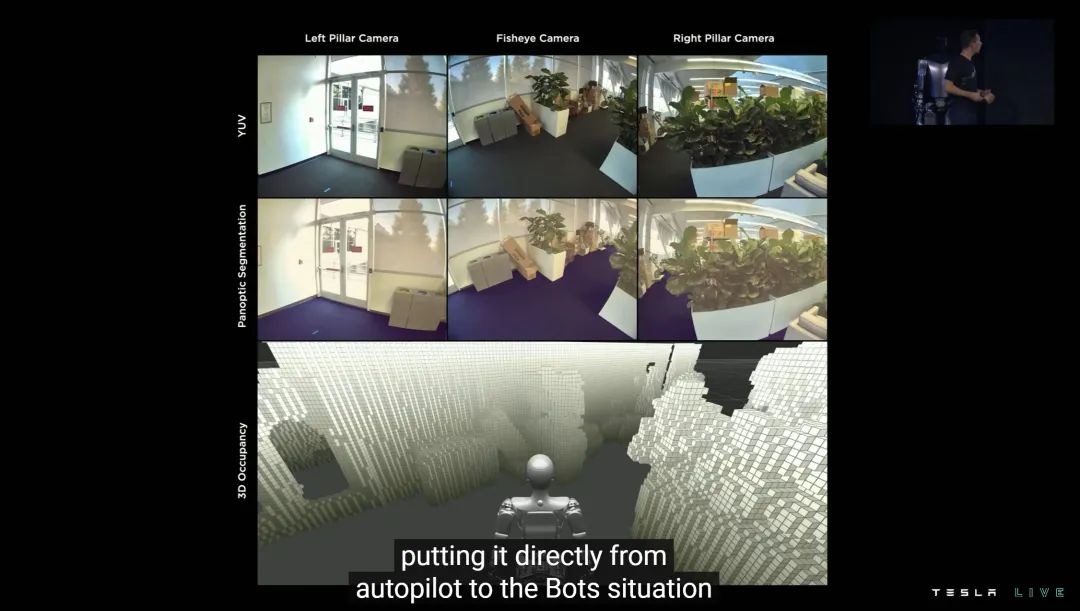 这样的努力下,Optimus 今年 4 月迈出了它的第一步;7 月份解锁了骨盆活动;8 月走路时可以摆手臂了——发布会前几周,实现了脚趾离地的类人行走动作。
这样的努力下,Optimus 今年 4 月迈出了它的第一步;7 月份解锁了骨盆活动;8 月走路时可以摆手臂了——发布会前几周,实现了脚趾离地的类人行走动作。 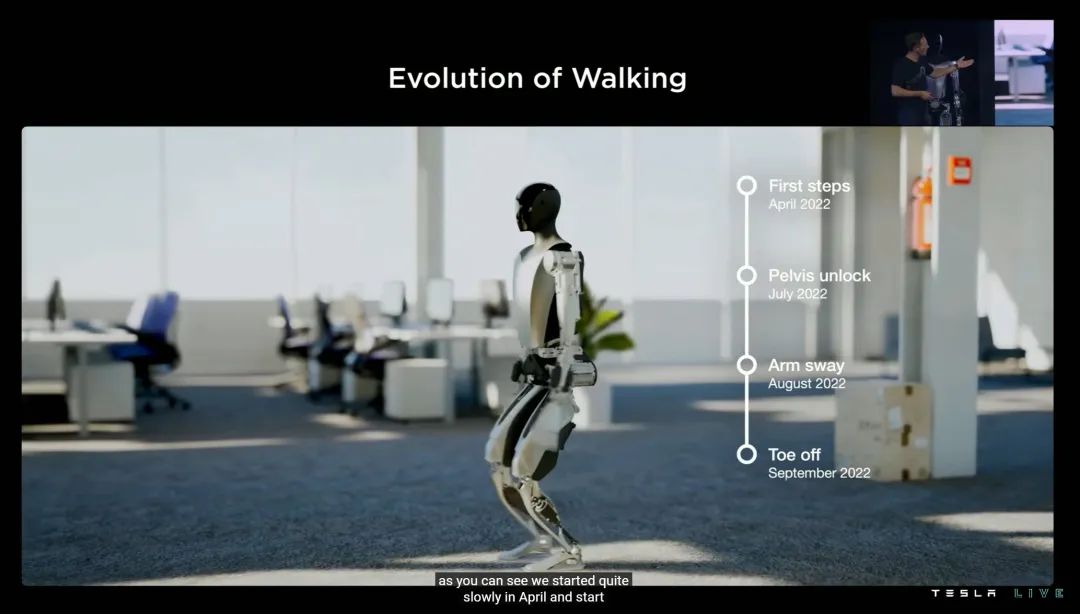 3. “肌肉”
3. “肌肉”
我们通过结缔组织包裹着的肌肉完成运动,机器人的“肌肉”则叫做促动器 actuator。 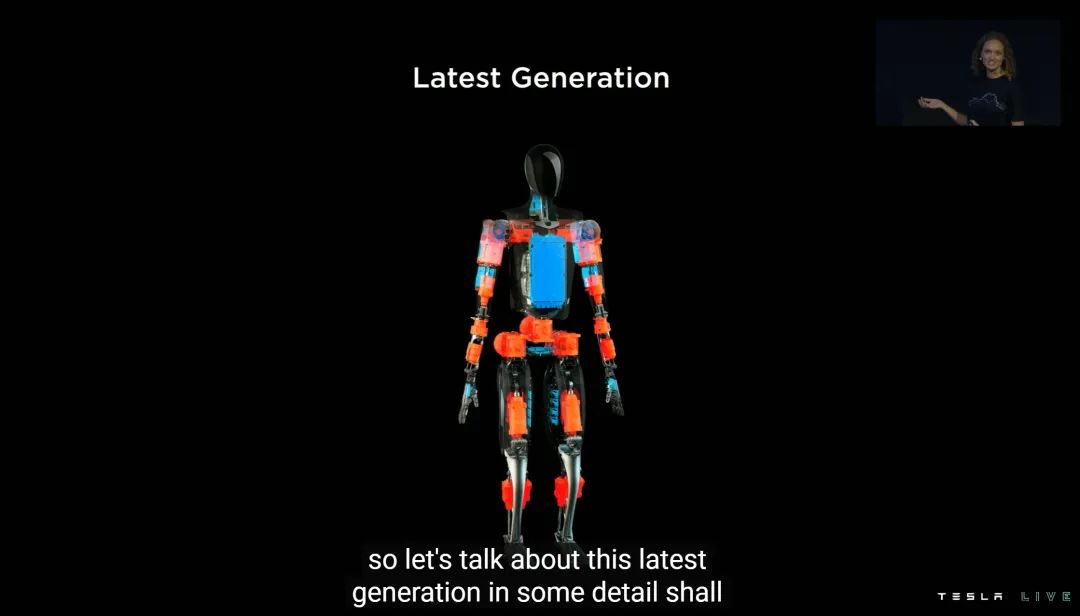 如上图所示,橙色部分均为 Optimus 的促动器,这些促动器也都是特斯拉完全自研的。
如上图所示,橙色部分均为 Optimus 的促动器,这些促动器也都是特斯拉完全自研的。 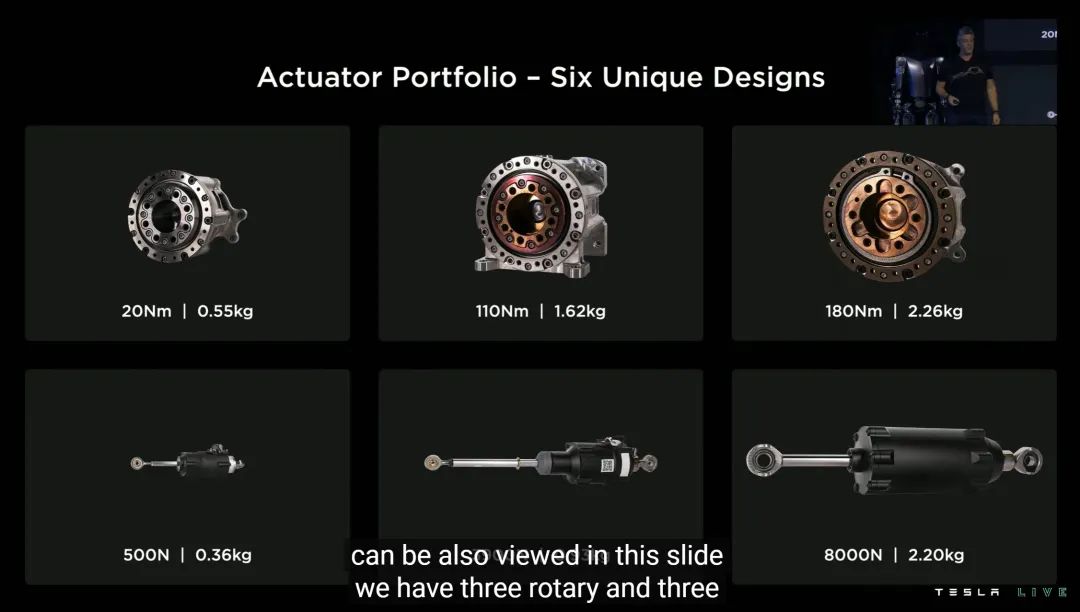 特斯拉为 Optimus 从力度大小的角度,设计了 6 种各自独特的促动器——这其实是很小的数字,业界平均是 20-30,甚至 50 种,目的是覆盖尽可能多的人类活动细节。 为什么特斯拉的促动器种类这么少?原因还是 FSD 体系。 特斯拉举了 28 种人类常见活动,比如抬举手臂、弯曲右膝等。通过分析这些活动反馈的云数据,找出各类运动的相对共同点,然后就可以尽量减少专门设计促动器的种类。
特斯拉为 Optimus 从力度大小的角度,设计了 6 种各自独特的促动器——这其实是很小的数字,业界平均是 20-30,甚至 50 种,目的是覆盖尽可能多的人类活动细节。 为什么特斯拉的促动器种类这么少?原因还是 FSD 体系。 特斯拉举了 28 种人类常见活动,比如抬举手臂、弯曲右膝等。通过分析这些活动反馈的云数据,找出各类运动的相对共同点,然后就可以尽量减少专门设计促动器的种类。 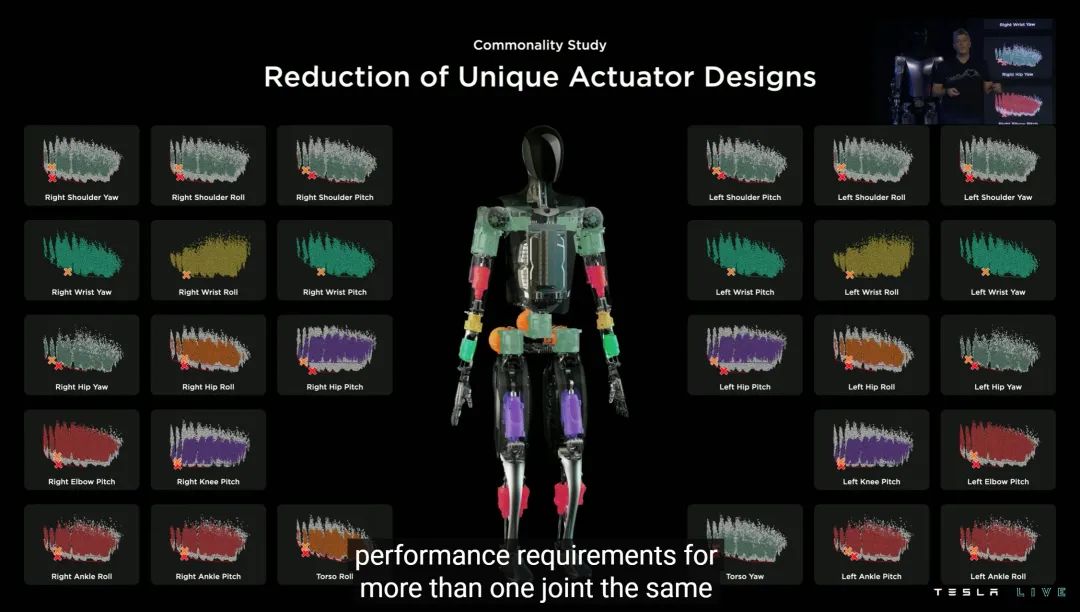 虽然只是轻描淡写的一张 PPT,但我认为促动器从 50 种减少到 6 种,意义实际上远大于借鉴特斯拉电机经验的促动器本体——因为它代表着数据为王的新工业时代。 不过促动器种类大幅度减少,也意味着 Optimus 前期的实际效果可能会没有那么类人,当然还是得等最终交付了。 最后来说一个数字:2 万美元。
虽然只是轻描淡写的一张 PPT,但我认为促动器从 50 种减少到 6 种,意义实际上远大于借鉴特斯拉电机经验的促动器本体——因为它代表着数据为王的新工业时代。 不过促动器种类大幅度减少,也意味着 Optimus 前期的实际效果可能会没有那么类人,当然还是得等最终交付了。 最后来说一个数字:2 万美元。
这笔钱买不到半台 Model 3,但却是马斯克口中 Optimus 的目标售价。“它会彻底改变人类社会的效率,就像无人交通可以彻底改变运输效率”。
 最前沿的电子设计资讯
最前沿的电子设计资讯

