AUTOSAR AP R21-11版本是目前公开的最新的版本,本文就AP R21-11版本的一些新内容进行分享,在分享的过程中也会结合R20-11版本和R19-11版本的一些内容进行说明。
AUTOSAR AP R21-11版本是目前公开的最新的版本,本文就AP R21-11版本的一些新内容进行分享,在分享的过程中也会结合R20-11版本和R19-11版本的一些内容进行说明。
1.R21-11删除内容EHMednc
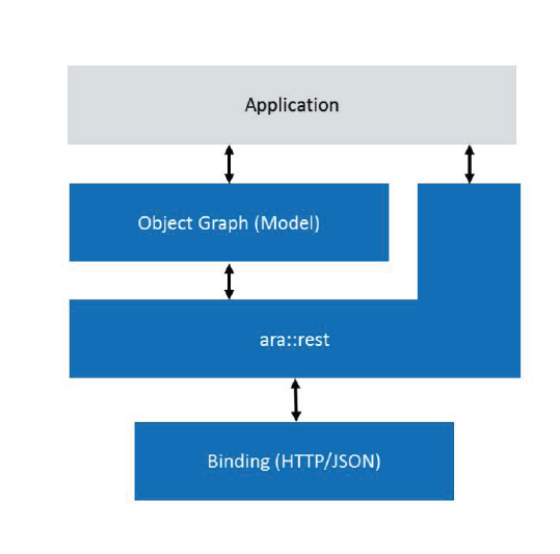
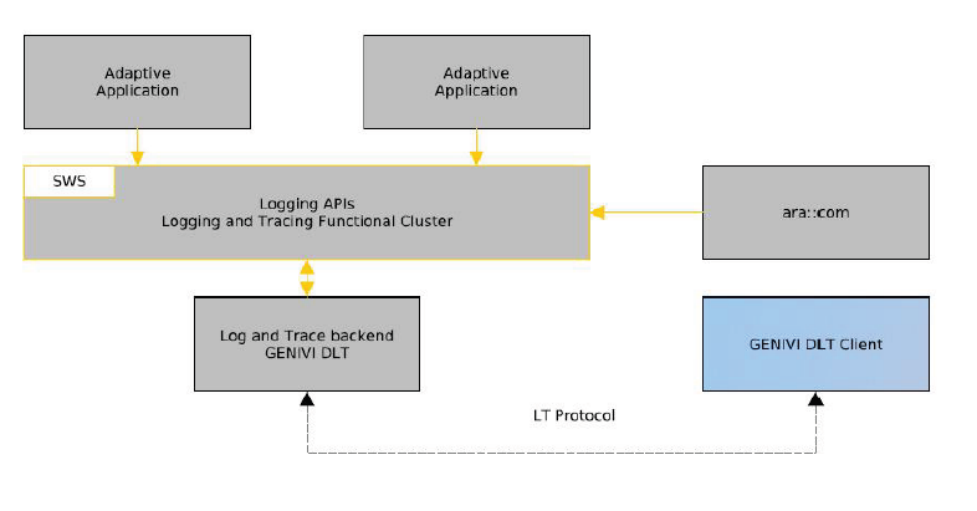
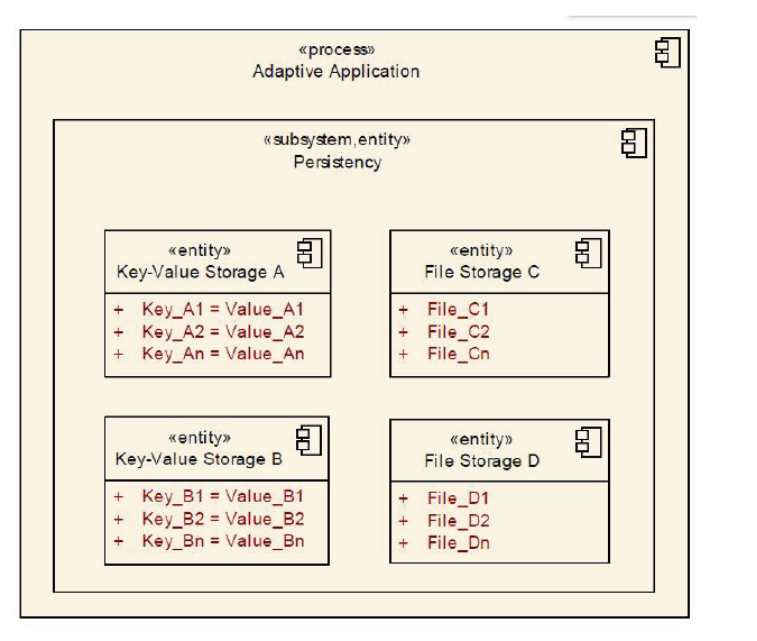
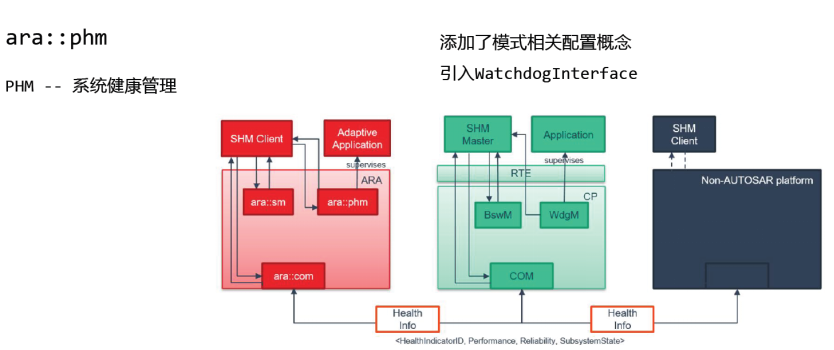
1.1 ara::restful功能集群ara::restful功能集群(Function Cluster,简称FC)在R21-11版本中被完全删除。我们分析认为删除原因在于本身这个功能集群基于绑定的一个HTTP协议,但是在车内通信或者是车外通信,这个模块用处不大。从AUTOSAR发布这个标准至今,从我们接触到的,几乎没有用户使用这个模块。可能考虑到这个使用率不高的因素,AUTOSAR组织在R21-11版本中直接删除这个模块。1.2 ara::logara::log and trace模块删除了部分内容,主要删除了无用的异常安全元素以及头文件、c++语法错误清理。从上图可以看出Logging and Tracing模块是以API的形式向上层提供应用,上层Adaptive Application直接调用Logging and Tracing Function Cluster 进行交互。如果我们想去读取一些存储在Logging and Tracing,就需要用到LT协议,而LT协议则用到 GENIVI DLT方式去读取。基本上现在大部分厂家都会把这部分内容兼容到自己的协议架里。1.3 ara::perara::per是跟持久性存储功能相关的一个功能集群,在R21-11版本中做了相应的内容更新,主要删除了kNotInitialized初始化标识以及移动构造函数/操作符。移动构造函数/操作符的删除主要是在Persistency相关对象里。我们认为删除的主要原因是为了防止数据在移动过的过程中造成数据丢失。这个功能本身已经把数据保存在Memory中,如果再通过移动构造函数搬到另一个地方,相对来说对数据不太安全,可能是出于这个因素考虑,新的版本中将这个内容删除。1.4 PHM
删除健康Channel
删除了向状态管理通知失败后的RecoverAction
从SupervisedEntity 类中删除了GetLocalSupervisionStatus() 和 GetGlobalSupervisionStatus() API

 最前沿的电子设计资讯
最前沿的电子设计资讯

